Prinzip der Arbeit von Einzelphasen -Induktionsmotoren:
Das Prinzip der Arbeit von Einzelphasen -Induktionsmotoren ist in Bezug auf die Leistung und das Gewicht des blonden Bieres niedriger als drei Phasenmotoren derselben Note. Sie sind jedoch einfach, robust, zuverlässig und billiger für kleine Notizen.
Sie werden in der Ausbildung mit niedriger Leistung in kleinen Branchen sowie inländischen und kommerziellen Anwendungen verwendet, bei denen nur ein einziges Angebot zur Verfügung steht. Sie sind im Allgemeinen in einer Notiz von 1 kW erhältlich.
Anwendungen sind viele Kompressoren im Kühlschrank und im Klimaanlagen, Waschmaschinen, Trockner, Lüfter, Pumpen, Haushaltsgeräte, kleinen Werkzeugmaschinen, Druckmaschinen und Bandrekorder.
Ein Arbeitsprinzip der einzelnen Phaseninduktionsmotoren hat einen Käfigrotor und eine einzelne Phasenwicklung im Stator.
Die Motivkraft von pulsierenden Magneto (MMF), die durch den Ca -Strom in der Wicklung des Stators erzeugt wird, kann als äquivalent zu zwei Wellen der konstanten Amplitude in entgegengesetzten Richtungen bei synchroner Geschwindigkeit angesehen werden.
Jedes dieser rotierenden MMF -Wellen induziert seinen eigenen Rotorstrom und erzeugt eine Wirkung des Induktionsmotors wie in einem Dreiphasenmotor.
Abbildung 6.60 hat gezeigt, dass Paare, die von den beiden rotierenden Feldern erzeugt werden, und auch das vom Motor erzeugte Netto -Drehmoment. Wenn der Rotor stationär ist, reagiert er auch auf die beiden Wellen und es wird kein Paar entwickelt.
Daher hat ein einzelner Phaseninduktionsmotor mit einer einzelnen Statorwicklung kein Startdrehmoment. Wenn es jedoch mit Hilfsmitteln begonnen wird, wird es ein Paar entwickeln und weiterhin betrieben.
Wenn der Rotor läuft, sind die induzierten Rotorströme so, dass ihr MMF in größerem Maße dem MMF des gegenüberliegenden Stators entgegengesetzt ist als dem vorderen Stator MMF.
Das Ergebnis ist, dass die vordere Strömungswelle, die das vordere Drehmoment entwickelt, größer ist als die umgekehrte Flusswelle, die ein umgekehrtes Drehmoment entwickelt. Das Netto -Drehmoment (Differenz zwischen direkten und invertierten Paaren) behalten die Bewegung aufrecht.
Mit zunehmender Geschwindigkeit steigt das vordere Drehmoment und das umgekehrte Drehmoment nimmt ab. Daher nimmt das Netto -Drehmoment allmählich mit Geschwindigkeit zu. Als er von seiner Nullgeschwindigkeit begann, sammelte er sich zuerst langsam, beschleunigt aber schnell mit einer fast synchronen Geschwindigkeit.
Das hintere Drehfeld erhöht das Gleitschieber der vollen Last und verringert daher den Effizienz und den Leistungsfaktor.
Die Wechselwirkungen zwischen dem vorderen Rotationsfeld und den Rotorströmen, die aufgrund des umgekehrten Rotationsfeldes und des umgekehrten Rotationsfeldes und der Drehdrehzote aufgrund des vorderen Drehfeldfeldes induziert wurden, erzeugen das zweite Harmonische Drehmomentimpulse des zweiten Hands, die Vibrationen und Rauschen verursachen.
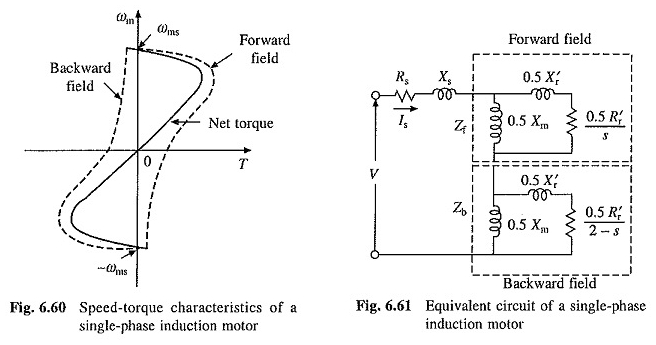
Abbildung 6.61 zeigt einen äquivalenten Schaltkreis eines Arbeitsprinzips von Einzelphasen -Induktionsmotoren mit einer einzigen Wicklung. Die äquivalenten Schaltkreise des Rotors, die die vorderen und rückwärtigen Rotationsfelder darstellen, sind in der Abbildung angegeben.
Wenn sich der Rotor mit einem Slip S (im Vergleich zum Vorderfeld) vorwärts bewegt, ist der Slip SN (im Vergleich zum hinteren Feld)
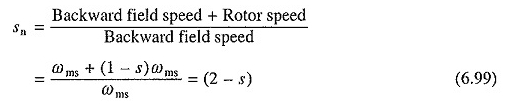
Infolgedessen wurde für das hintere Feld der Widerstand gegen den Rotor durch (2 – s) in der äquivalenten Schaltung geteilt, aus der der Strom des Stators für jeden vermeintlichen Gleitwert berechnet werden kann, wenn die Motorimpedanz und die angelegte Spannung bekannt sind.
Zu gehen

Durch das fortgeschrittene Feld in Rotor (oder Luftstrom) übertragen
![]()
Paar aufgrund des fortgeschrittenen Feldes

Durch das Rückfeld in den Rotor (oder Luftstrom) übertragen

Drehmoment aufgrund des hinteren Feldes

Das Drehmoment auf dem hinteren Feld befindet sich in der Richtung gegenüber der des vorderen Feldes. Daher entwickelte das Paar Netz
