Bau des dreiphasigen Induktionsmotors:
Ein Dreiphasen -Induktionsmotor, den ein Konverter baut, hat die folgenden Vorteile auf einer Linie, die an der Linie ernährt ist:
1. Das Start der Wäsche wird durch eine variable Frequenz von einem Boden garantiert
2. Das Starten und Beschleunigen des Stroms und des Drehmoments ist möglich.
3. Das Netzwerk unterliegt nicht mehr einem hohen Überspannungsstrom, da der direkte Umschalter auf dem Bau von Käfig -Induktionsmotoren mit dreiphasigen Phasen umschaltet, und als solche kann die spezielle Startausrüstung auch auf hohe Chancen weggelassen werden.
4. Viele Trägheitsmomente können beschleunigt werden, ohne die Motorabmessung zu benötigen.
5. Der Konverter fungiert als Entkopplungsgerät.
Infolgedessen tritt keine Motor-Feedback am Kurzschlusspunkt auf, wenn die Kurzstrecke der Linie, die Kurzschluss-Bewertung, auf der Grundlage der größten Anzahl von Dienstleistungen übertrieben sein muss, sodass eine Wirtschaft ermöglicht werden kann.
Wie bereits erwähnt, kann die Konstruktionsgeschwindigkeit des dreiphasigen Induktionsmotors gesteuert werden, indem der Stator eine variable Spannung vermittelt, eine variable Frequenzleistung unter Verwendung statischer Frequenzwandler.
Die Geschwindigkeitsregelung ist auch möglich, indem die Schiebleistung im Stromversorgungssystem unter Verwendung von Wandlern in der Rotorschaltung gefüttert wird. Grundsätzlich gibt es zwei verschiedene Geschwindigkeitskontrollmethoden.
1. Control Control Control Training Das Slace -Freeding, wenn der Stator aus konstanter Spannung und konstanten Frequenzleitungen angetrieben wird.
2.RISIZE MOTOR -Steuerung unter Verwendung einer variablen Spannung der variablen Frequenz und Betrieb des Motors bei einer konstanten Rotorfrequenz.
Die Geschwindigkeitsregelung durch Variation der Schlupffrequenz wird wie folgt erhalten:
1.Statorspannungssteuerung mit einem dreiphasigen Spannungsregler.
2. Steuerung des Rotorwiderstands unter Verwendung eines von einem Hackschrauber im Rotorschaltungssteuerungssteuerwiderstand steuerten Widerstand.
3. Verwenden Sie eine Wandlerkaskade im Rotorkreis, um die Energie der Verschiebung wiederherzustellen.
4. Verwenden Sie einen Cycloconverteur im Rotorkreis.
Steuerung eines Induktionsmotors durch Statorspannungsvariation (unter Verwendung eines Dreiphasenspannungs -Controllers)
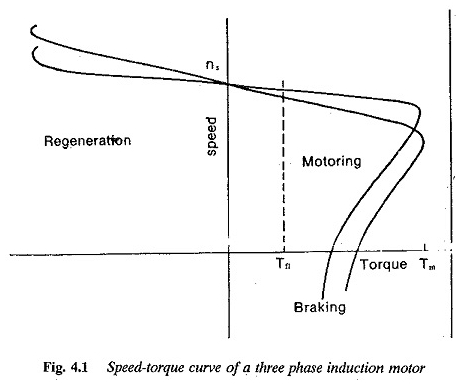
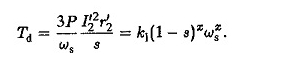
Es ist sehr bekannt, dass das Drehmoment einer Konstruktion von dreiphasigen Induktionsmotoren im Verhältnis zum Quadrat der Spannung direkt variiert. Das Drehmoment eines Induktionsmotors ist ungefähr gegeben durch

Und die Drehmomentgeschwindigkeitskurve ist wie in Abbildung 4.1 dargestellt. Das Schieben für das maximale Drehmoment ist gegeben 
das ist unabhängig von der Statorspannung. Dies kann jedoch durch die Variation des Rotorwiderstands variiert werden. Der maximale Drehmomentwert ist gegeben durch

Es ändert sich auch wie das Quadrat der angewendeten Spannung. Wenn die Spannung auf 80%reduziert wird, sinkt das maximale Drehmoment auf 64%. Die Variation der angelegten Spannung wird mittels eines Spannungsreglers erhalten.
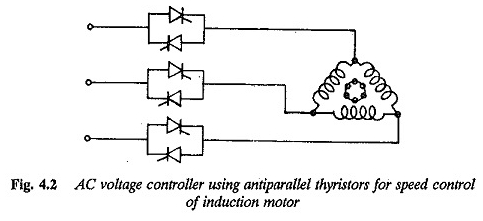
Diese Methode zur Steuerung der Geschwindigkeit eines Induktionsmotors ist einfach und wirtschaftlich. Die Statorspannungsregelung wird mittels der Phasenkontrolle von antiparallelen Thyristoren erhalten, wie in Abbildung 4.2 angegeben.
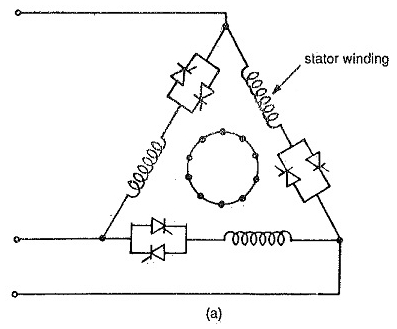
Die Abbildungen 4.3 (a) und (b) veranschaulichen zwei praktische Verbindungen eines Spannungssteuerers, der eine Motorkonstruktion mit einer dreiphasigen Induktion liefert. In Verbindung mit Abbildung 4.2 dürfen Thyristoren nur den Phasenstrom verwalten. Harmonische Strömungen werden höher. In Abbildung 4.3 ist die harmonische Strafe eher mehr.
Die Statorspannung kann im Trigger -Eckbereich von Null bis Vollwert variieren. Der Linienfaktor auf der Linienseite ist aufgrund der Harmonischen und der Blindleistung aufgrund der Phasenkontrolle sehr mittelmäßig.
Wenn ein Käfig -Induktionsmotor aus einer variablen Spannungsleistung für die Geschwindigkeitsregelung betrieben wird, können folgende Beobachtungen durchgeführt werden:
1. Die Drehmomentgeschwindigkeit über den maximalen Drehmomentpunkt hat eine negative Form. Ein stabiler Betriebspunkt in diesem Bereich ist für eine konstante Drehmomentlast nicht möglich.
2.Der Spannungsregler sollte in der Lage sein, dem Geschwindigkeitsregelbereich den hohen Start zu widerstehen.
3. Die Motorleistung ist schlecht.
Um die oben genannten Schwierigkeiten zu vermeiden, muss der Bau des Dreiphasen-Induktionsmotors einen hohen Widerstandsrotor aufweisen. Dies macht den maximalen Drehmomentwechsel auf S = 1, wodurch der instabile Bereich der Geschwindigkeitsgeschwindigkeitskurve verringert wird.
Aufgrund der Zunahme des Rotorwiderstands nimmt der Startstrom ab, der Leistungsfaktor verbessert sich und der Geschwindigkeitsregelbereich steigt.
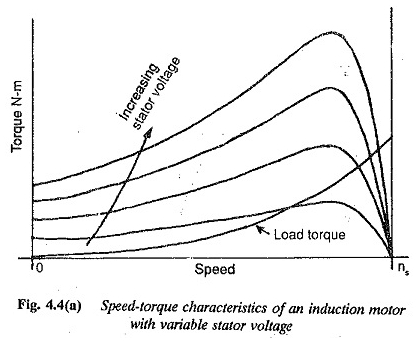
Die Geschwindigkeitsregelungsmethode ist daher bei einem Rotor mit hohem Widerstand vorteilhaft. Drehmomentgeschwindigkeitskurven für diese Steuerung sind in Abbildung 4.4 (a) dargestellt. Die Stromnotiz des Controllers entscheidet das mögliche Drehmoment bei jeder Geschwindigkeit.
Die Drehmomentbegrenzungskurve abhängig von der Geschwindigkeit kann abgeleitet werden. Abbildung 4.4 (b) zeigt diese Grenze -Drehmomentkurve für die Controller -Design -Notation, die das Dreifache des Nennmotorstroms ist. Der Strom als Funktion der Geschwindigkeit und Spannung des Stators wird dargestellt.
Wenn der Stromwert während der Steuerung den Grenzwert überschreitet, muss die automatische Strombegrenzung verwendet werden. Damit wird der Wert des Schießwinkels eingestellt, bis der autorisierte Stromkreis zirkuliert.
Auch wenn die Methode einfach und wirtschaftlich ist, nehmen motorische Verluste mit zunehmender Verschiebung zu. Der Anstieg der Verluste kann auf den Anstieg des Motorstroms aufgrund des Abfalls des Flusses des Luftraums sowie des hohen Widerstands des Rotors zurückgeführt werden.
Das R1 / R’2 -Verhältnis kann als repräsentativ angesehen werden, um diese Verluste zu bestimmen, da die Zunahme des Widerstands bei der Begrenzung des gezogenen Stroms entscheidend ist. Motoreffizienz kann ungefähr gegeben werden durch
![]()
Wo S das Schieben des Motors ist.
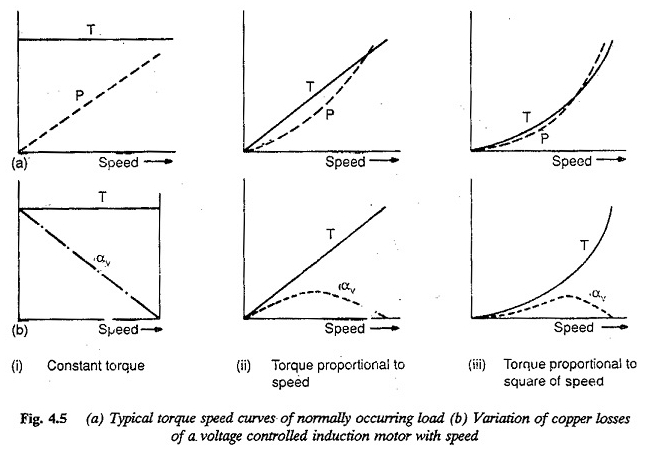
Die vom Motor angetriebene Art der Last beeinflusst den gezogenen Strom und die Verluste des Motors, wenn die Verschiebung unterschiedlich ist. Die normalerweise durchführenden Gebühren sind
1. Bequeme Drehmomentlasten
2. Torquevariable proportional zur Geschwindigkeit
3.. Totor -Variable proportional zum Quadrat der Geschwindigkeit

Bedenken Sie, dass die Ladungsgeschwindigkeitseigenschaften der Last durch eine allgemeine Gleichung angegeben sind
![]()
Wenn der Wert von x = 0, entspricht er einer konstanten Drehmomentlast. X> 0 für variable Drehmomentlasten (Abb. 4.5a).
Rotorkupferverluste
![]()
wobei PD1 die Leistung des Luftraums oder des Rotorversorgungseingangs ist.

Aber das Gleiten des Motors
und die Rotor -Leistungseingabe
![]()
Der am Rotor übertragene maximale Leistungswert ist
![]()
Kupferverluste, wenn sie als PD1MAX -Bericht ausgedrückt werden, den wir haben
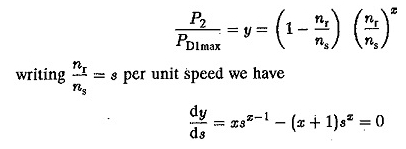
Für den Wert des SAT, der maximal ist. Der Wert von

Für einen maximalen Wert des Rotorkupferverlusts. Die maximalen Werte von Rotorkupferverlusten sind gegeben durch

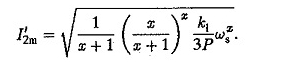
Wenn der Wert von x zunimmt, nimmt der Wert von ym ab. Der Maximalwert des Rotorstroms und die Einheitsdrehzahl, für die er auftritt, kann ebenfalls bestimmt werden. Wir haben
aus dem der Rotorstrom
![]()
durch einheitliche Geschwindigkeit für den Maximalwert des Rotorstroms ist auch
![]()
Der Maximalwert des Rotorstroms kann als bestimmt werden als
Für besondere Fälle
Die Variation der Verluste ist in Abbildung 4.5 (b) für verschiedene Arten von Lasten dargestellt. Aufgrund der Zunahme der miesen Verluste mit der Verschiebung und der maximalen zu S = 1,0 werden konstante Drehmomentlasten nicht bevorzugt.
Dies ist aus der Variation des Flusses offensichtlich, da die Spannung für die Geschwindigkeitsregelung variiert wird. Um ein konstantes Drehmoment aufrechtzuerhalten, zieht der Motor einen schweren Strom an, was zu einem schlechten Drehmoment / Ampere, einer schlechten Effizienz und einem schlechten Leistungsfaktor bei niedriger Geschwindigkeit führt.
Wenn das Drehmoment in direktem Anteil zur Beschleunigung variiert, haben Kupferverluste einen Höchstwert von 25% Nennleistung bei einer Geschwindigkeit von 0,5 Ω.
Für Paare, die proportional zum Quadrat der Geschwindigkeit proportional sind, beträgt die Einheitsdrehzahl, für die Kupferverluste maximal 2/3 sind, 2/3 und der Maximalwert der Kupferverluste 0,149 Nominalleistung.
Die Geschwindigkeitskontrollmethode kann vorteilhaft für Pumpen- oder Lüfterlasten verwendet werden, wobei das Drehmoment proportional zum Quadrat der Geschwindigkeit ist.
Aus der obigen Diskussion ist diese Geschwindigkeitskontrollmethode nur für die folgenden Fälle geeignet:
1. für kurzfristige Operationen, bei denen die Dauer der Geschwindigkeitskontrolle definiert ist.
2. Um die Geschwindigkeit der Gebläse oder Pumpen mit parabolischen oder kubischen Variationen des Drehmoments mit Geschwindigkeit zu steuern. Dies eignet sich nicht für konstante Drehmomentlasten aufgrund eines Anstiegs der Verluste und des Erhitzens.
3., um die Motordrehzahl mit einem schlechten Effizienz unter normalem Betrieb zu steuern.
Die Art der Last (Drehmoment abhängig von der Lastgeschwindigkeit) des Antriebsmotors beeinflusst die Verluste im Motor. Nicht -sinusoide Eingangswellen verursachen nicht -sinusoide Strömungen, die harmonische Verluste erhöhen.
Infolgedessen steigen die Gesamtverluste insbesondere bei niedrigen Geschwindigkeiten an, und diese Verluste führen zu einer möglichen Verengung des Motors, oder ein übermäßig dimensionaler Motor muss verwendet werden, wenn diese Methode angewendet wird.
Bei den Blasentyplasten, wobei T α N2 der Maximalwert des Stroms bei einer Geschwindigkeit von 2/3 der Grundgeschwindigkeit erfolgt. Dieser Strom hängt von der vollständigen Motorlast des Motors ab. Bei großen Gleitmotoren (hohe Widerstandsrotoren) nimmt der maximale Strom zum Nennstrom ab.
Bei konstanten Drehmomentlasten steigen die Leistungsverluste mit der Geschwindigkeitsreduzierung und erreicht selbst den Maximalwert bei Null. Bei Lasten mit T α N tritt das Maximum bei 1/2 auf, die Grundgeschwindigkeit und die Verluste beträgt 25% der Leistung des Stators.
Die im Motor auftretenden Verluste sind für den Anstieg der Motortemperatur verantwortlich. Die Verluste müssen im autorisierten Wert aufbewahrt werden, damit der Motor immer noch mit einer autorisierten Temperaturerhöhung arbeitet. Die verschiedenen diskutierten Arten von Gebühren erhöhen tendenziell motorische Verluste.
Zusätzlich wird die Wellenform der Eingangsspannung verzerrt. Die Stator- und Rotorströme sind mit reichhaltigem harmonischem Inhalt nicht -sinusoidal. Diese Harmonischen verursachen zusätzliche Verluste. Sie können als 50% der nominalen Kupferverluste angesehen werden.
Die Zunahme der motorischen Verluste mit großen Verschiebungen führt zu einer Verengung des Motors. Ein normaler Motor kann von 5 bis 6 Mal freigesetzt werden. Wenn der uflische Faktor verwendet wird, nimmt der hohe Widerstandsrotor ab.
Gesamtmotorverluste sind

Oder
FV kümmert sich um den Anstieg der Verluste aufgrund von Verzerrungen und wird normalerweise 1,5 betrachtet.
PR ist die Bewertung des Motors
K1PR ist der Gesamtkupferverlust des Motors.
Um die Zunahme der autorisierten Temperatur aufrechtzuerhalten, sind die autorisierten Verluste

Oder
η ist Motoreffizienz
αV ist die Beziehung der Verluste mit einer Mindestgeschwindigkeit, um Verluste zu bemerken. Geschwindigkeit.
PTVP -Bewertung des Motors.
Der αV -Faktor hängt von der Art der verwendeten Last ab. Für Maschinen, die gewaltsam abgekühlt sind, ist es 1,0 und unabhängig von der Geschwindigkeit. Wenn die Maschine automatisch refroit ist, hängt dies von der Geschwindigkeit ab. Dieser Wert nimmt ab, wenn die untere Grenze der Geschwindigkeit abnimmt.
Ein typisches Merkmal für eine Maschine mit zwei Polen ist in Abbildung 4.5 (c) dargestellt. Die Verengung wird auch durch die Effizienz des Motors beeinflusst. Wenn der Effizienz nimmt, nimmt 1-η / η zu. Für diese Art von Geschwindigkeitsregelmotor des großen Rotors werden 17 Widerstand verwendet. Sie haben eine schlechte Effizienz. Daher nimmt die Verengung des Motors ab.

Die obige Diskussion zeigt eindeutig an, dass ein bestimmter Motor unterschiedlich verzerrt ist, wenn sie unterschiedliche Arten von Lasten verursacht.
Mit anderen Worten, die von der Last erforderliche Leistung ist konstant. Die Antriebsmotor muss unterschiedliche Abmessungen für verschiedene Arten von Lastgeschwindigkeitskurven der Last sein, das Beispiel abhängig vom Illustren.