Beginn des Induktionsmotor -Trainings:
Das Starten der Anordnung des Einführungsmotortrainings wird gemäß den Lastanforderungen und der Art der Stromversorgung (niedrig oder starr) ausgewählt. Es kann erforderlich sein, die folgenden Funktionen zu haben:
- Der Motor muss ein ausreichendes Startdrehmoment entwickeln, um die Reibung, das Belastungsdrehmoment und die Trägheit des Motorlastsystems zu überwinden und den Startvorgang innerhalb einer vorgeschriebenen Zeit zu vervollständigen.
- Die Amplitude des Startstroms muss so sein, dass er keine Überhitzung der Maschine verursacht und nicht zu einem Abfall der Quellspannung liegt, die über einen autorisierten Wert hinausgehen.
Normalerweise zeichnet ein Motor während des Start -up das 5- bis 7 -fache des Nennstroms.
Wenn das Ladedrehmoment während des Start -up und die Trägheit der Motorlast nicht wichtig ist, ist der Beginn des Einführung des Einführung des Motortrainings in wenigen Sekunden abgeschlossen und daher überschreitet die Motortemperatur den autorisierten Wert nicht.
In solchen Anwendungen kann der Motor jederzeit direkt online gestartet werden, vorausgesetzt, der durch einen große Startstrom verursachte Abfall der Spannung liegt nicht über einen autorisierten Wert hinaus. Bei kleinen Motoren liegt der Spannungsabfall im Kraftrohr im Allgemeinen unter dem akzeptablen Niveau.
Wenn der Motor eine große Kapazität hat und / oder von einem niedrigen System genährt wird, ist ein bestimmtes Startgerät erforderlich, um den Startstrom zu reduzieren. In diesen Anwendungen spielt es keine Rolle, ob die Verringerung des Startstroms von einer Verringerung des Startdrehmoments einhergeht.
Wenn das Ladedrehmoment während des Start -ups hoch ist oder die Trägheit der Last wichtig ist, dauert der Beginn des Trainingsprozesses des Induktionsmotors lange. Wenn der Motor während des Start -up einen erheblichen Strom trägt, wird er aufgrund von Überhitzung beschädigt. Daher kann die Engine nicht direkt online gestartet werden.
In diesen Fällen werden die Start -up -Methoden verwendet, die eine Abnahme des Startstroms ohne Abnahme des Startdrehmoments ermöglichen. In einigen Anwendungen kann eine Erhöhung des Startdrehmoments mit einer Abnahme des Startstroms erforderlich sein.
In einem Eichhörnchen -Käfigmotor können bestimmte Messungen zur Verbesserung der Startleistung können. Im Designstadion, wie im Fall von hohen Eichhörnchen -Käfigmotoren und mit einer tiefen Stange und einem Doppelkäfig, aufgenommen werden. Bei Bedarf sind die Methoden zum Starten der Motoren mit Eichhörnchenkäfig:
- Star-Delta-Starter
- Automatischer Transformatorstarter
- Reaktorstarter
- Sättiger Reaktorstarter
- Teil von teilweise
- AC -Spannungssteuerer Starter
- Mit dem Rotorwiderstandsstarter wird der Wundrotormotor gestartet:
Methoden (1) – (5) und (7) werden hier und die Methode (6) in Trocken beschrieben. 6.11.
Star-Delta-Starter:

Bei dieser Methode wird ein Induktionsmotor für den normalen Betrieb mit der Delta -Verbindung während des Start -up als Stern angeschlossen. Dies reduziert die Statorspannung und den Strom um 1 / √3.
Da das Motordrehmoment proportional zum Quadrat der Statoranschlussspannung ist, wird das Start -up -Drehmoment auf Dritte reduziert. Ein Schaltkreis für Stern-Delta-Start ist in Abbildung 6.7 dargestellt. Die CBM- und CD -Leistungsschalter sind geschlossen, um die Maschine mit der Sternverbindung zu starten. Wenn die permanente Geschwindigkeit erreicht ist, ist CBS geöffnet und CBR ist geschlossen, um die Maschine in Delta zu verbinden.
Automatischer Transformatorstarter:
Eine reduzierte Spannung für den Start -up kann auch aus einem automatischen Transformator erhalten werden. Für eine sekundäre Wende in Primärwende werden die motorische Klemmenspannung und der Statorstrom durch AT reduziert. Dies reduziert den Strom, der aus der Stromversorgung von A2T gezogen wird.
Da das Drehmoment proportional zum motorischen Klemmespannungsquadrat ist, wird er auch durch A2T reduziert. Sobald der Motor beschleunigt ist, ist er an die volle Leistungsspannung angeschlossen. Ein automatischer Transformator -Startkreis ist in Abbildung 6.8 (a) dargestellt. Zunächst wird CBS1 geschlossen, gefolgt von CBS2.
Wenn der Motor mit voller Geschwindigkeit beschleunigt, ist CBS2 geöffnet und CBM geschlossen. CBS1 ist jetzt offen, um den Self-Transformator des Lebensmittels zu trennen.
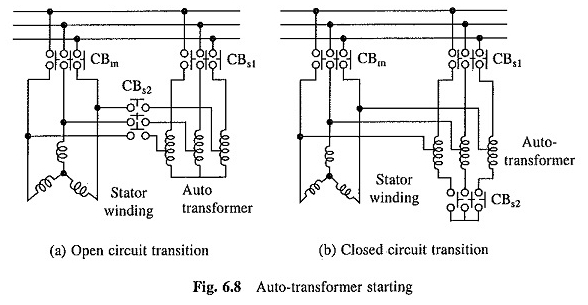
Übergang des geschlossenen Schaltkreises:
In Stern-Delta- und Selbsttransformator-Startmethoden stört der Durchgang von niedriger Spannung auf Vollspannungsverbindung den Statorstromfluss und das Statorfeld kollabiert. Der Strom des Rotors fließt aufgrund seiner großen konstanten Zeit weiter.
Das von Rotorströmen erzeugte Feld induziert Spannungen in den Statorwicklungen. Die induzierte Spannungsphase ist unabhängig von Fütterungsspannungen. Zum Zeitpunkt der Wiederverbindung wird ein großer Stromstrom beim Induzieren erzeugt, und die Versorgungsspannungen sind aus der Phase.
Wenn der Strom nicht akzeptabel ist, wird der Übergang des geschlossenen Schaltkreises verwendet. Ein Übergangsschema für einen automatischen Transformatorstarter ist in Abbildung 6.8 (b) dargestellt. Er verwendet drei Leistungsschalter: CBS1, CBS2 und CBM.
Der erste CBS2 ist geschlossen, um die Self-Transformator-Sternpunktverbindung zu schließen. CBS1 ist danach geschlossen. Dadurch wird die Niedrigspannungsverbindung des Selbsttransformators abgeschlossen und der Motor startet. Sobald die Geschwindigkeit erreicht ist, ist der CBS2 -Schaltkreislauf geöffnet.
Der Motor arbeitet nun mit dem oberen Teil der automatischen Transformatorphase -Windungen in Reihe mit dem Stator. Die Wicklungen funktionieren einfach als Serienreaktoren. Von nun an ist CBM des Leistungsschalters geschlossen, was die Reaktoren der Serie umgeht und den Motor direkt mit der Stromversorgung verbindet.
Zu Beginn des alternativen Beginns ist der erste CBS1 anstelle von CBS2 geschlossen. Dann erzeugt der Motor und der Transformator nicht gleichzeitig die Überspannung des Magnetisierungsstroms.
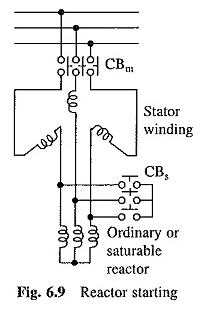
Reaktorstarter:
Der Start -up -Strom kann auch reduziert werden, indem ein dreiphasiger Reaktor in Reihe mit Stator angeschlossen wird.
Wenn der Motor die volle Geschwindigkeit erreicht, wird der Reaktor umgangen. Abbildung 6.9 hat ein solches Diagramm gezeigt. CBM ist geschlossen, um die Maschine zu starten. Sobald die volle Geschwindigkeit erreicht ist, ist CBS für den Kurzschluss des Reaktors geschlossen. Es ist vorteilhaft, den Reaktor mit dem neutralen Ende der Statorwicklung zu verbinden.
Dies minimiert seine Spannungsbewertung und behält auch die Spannung und den CBS -CBS -Spannung des Leistungsschalters mit neutralem Potential während des Betriebs des normalen Motors bei.
Beginn der sanften Verwendung des satugelenden Reaktors:
In einigen Anwendungen muss das Startdrehmoment ohne Schritt überprüft werden. Beispielsweise muss es in Textilmaschinen vorsichtig variiert werden, da die Faserdrähte während des Starts -UP brechen. Eine solche Startanordnung wird als reibungsloser Start -up bezeichnet.
Das Diagramm des Thyristor -Spannungsreglers wird jetzt für Start -up häufig verwendet. Eine bestimmte Anzahl vorhandener Discs verwenden auch einen satuablen Reaktorstarter, bei dem ein dreiphasiger satuerbarer Reaktor in Reihe mit dem Stator angeschlossen ist. Der Sättigungsreaktor hat eine DC -Steuerung.
Die Reaktanz des satubernen Reaktors kann ohne Schritt variiert werden, indem der Strom der Kontrollwicklung geändert wird. Für Start -up wird die Reaktanz zunächst auf den höchsten Wert definiert. Das Start -up -Drehmoment liegt nahe bei Null. Die Reaktanz wird nun reibungslos reduziert, indem der Strom der Kontrollwicklung erhöht wird.
Dies gibt eine Variation ohne Stadium des Startdrehmoments. Daher beginnt der Motor, ohne vorsichtig abzuwehren und zu beschleunigen.
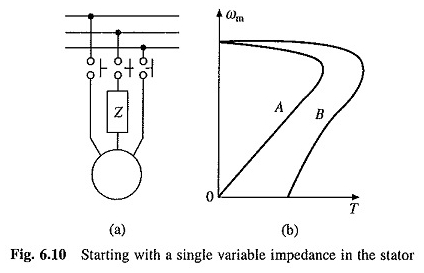
Unausgeglichenes Start -up -Diagramm für einen flexiblen Start:
Für Start -up ohne Funktion kann auch eine in Abbildung 6.10 (a) gezeigte billigere Alternative verwendet werden. Es besteht aus einer Variablen -Z -Impedanz Z in einer der Phasen der Maschine.
Wenn die Impedanz sehr hoch ist, arbeitet die Maschine mit einem einzigen Phasen und ihr Geschwindigkeitsnarakteristik ähnelt dem Merkmal von Abbildung 6.10 (b) mit einem Null-Startdrehmoment.
Wenn die Impedanz vollständig entfernt ist, ähnelt die Geschwindigkeitsdrehmomentkurve der B -Merkmal, die das natürliche Merkmal der Maschine ist. Für die Zwischenwerte mit Zwischenimpedanz liegt die Geschwindigkeitsgeschwindigkeitskurve zwischen den Kurven A und B.
Ein flüssiger Start ohne Schock wird erreicht, wenn die Impedanz ohne Schritt kontrolliert wird. Impedanz kann ein variabler Widerstand oder ein einzelner Satuablenreaktor sein.
Der Motor arbeitet mit unausgeglichenen Statorspannungen, daher nehmen Kupferverluste zu. Somit ist dieses Diagramm nur für einen kurzen Betrieb geeignet.
Beginn des Teilswicklung:
Einige Eichhörnchen -Käfigmotoren haben zwei oder mehr Statorwicklungen, die während des normalen Betriebs parallel angeschlossen sind. Zunächst ist eine einzelne Wicklung verbunden. Dies erhöht die Impedanz des Stators und verringert den Startstrom. Ein solches Startschema wird als Beginn des Spiels bezeichnet.
Die Implementierung für eine Maschine mit zwei Statorwicklungen ist in Abbildung 6.11 dargestellt. Die Maschine beginnt mit dem Wickeln 1, wenn CBM geschlossen ist. Sobald die Geschwindigkeit abgeschlossen ist, ist CBS geschlossen, um die Wicklung 2 zu verbinden.

Rotorwiderstandstarter:
Rotormotoren der Wunden werden im Allgemeinen durch den Zusammenhang von externen Widerständen im Rotorkreis gestartet (Abb. 6.12 (a)). Der höchste Widerstandswert wird ausgewählt, um den Strom in der sicheren Wette auf eine Nullgeschwindigkeit zu beschränken.
Wenn sich der Motor beschleunigt, werden die Abschnitte des externen Widerstands durch die Schließung der C1-, C2- und C3 -Kontakte nacheinander geschnitten, um den Strom des Rotors zwischen den angegebenen maximalen und minimalen Werten zu begrenzen (Abb. 6.12 (b)).

Da der größte Teil des Rotorkupferverlusts bei externen Widerständen auftritt, ist der Anstieg der Rotortemperatur während des Start -up im Vergleich zu den oben beschriebenen Startmethoden signifikant niedriger.
Das wichtige Merkmal dieser Einführungsmotor -Startmethode besteht darin, dass das Startdrehmoment und das Drehmoment zu Strom hoch sind.
Es ist daher für Anwendungen geeignet, die eine schnelle Beschleunigung, Abfahrten und häufige Stopps erfordern, beginnend mit einer intensiven Belastung und Beginn einer hohen Trägheit.
Während das maximale Drehmoment unabhängig vom Rotorwiderstandswert (Gleichung (6.13)) ist, kann die Geschwindigkeit, mit der das maximale Drehmoment erzeugt wird, durch Modifizierung des Werts externer Widerstände (Gleichung (6.12)) gesteuert werden. Externe Widerstände können daher variiert werden, um die Maschine mit maximalem Drehmoment zu beschleunigen.