Bremsung der Einführung Motor:
Die drei Arten der Bremsung des Induktionsmotors, nämlich regenerative, dynamische und Gegenstrombremsung, können auch mit Induktionsmotoren erreicht werden.
Regeneratives Bremsen
Wenn der Rotor eines Induktionsmotors schneller als das Statorfeld funktioniert, wird die Verschiebung negativ und die Maschine erzeugt Strom. Wenn der Motor dazu neigt, schneller zu arbeiten als das Rotationsfeld, tritt regeneratives Bremsen auf und ke
Rotative Teile werden in den Sektor zurückgegeben. Die Drehmomentdrehzahlkurve erstreckt sich bis zum zweiten Quadranten (Abb. 1.47). Die Motordrehzahl nimmt ab. Das Bremsdrehmoment betreibt den Motor mit konstanter Geschwindigkeit und stoppt seine Tendenz, schneller zu drehen.
Aufgrund der Auswirkungen des Widerstands gegen das Stator ist das während der Regeneration entwickelte maximale Drehmoment höher als das maximale Drehmoment während der Hülse. In Palans und Kranen arbeitet der Antriebsmotor tendenziell schneller als die Synchrongeschwindigkeit.
Diese Situation tritt auf, wenn der Hebezeug einen leeren Käfig erhebt. Aufgrund des Gegengewichts kann der Fall gefährliche Geschwindigkeiten erlangen. Der Übergang erfolgt fast automatisch und ein Paar wurde entwickelt, um die Beschleunigung und Regeneration zu stoppen.
Diese Art des Betriebs ist auch möglich, wenn die Last den Motor während der Last der Last überarbeitet. Die automatische Regeneration stoppt eine übermäßige Beschleunigung. Eine Rotorwiderstandskontrolle kann verwendet werden, um ein besseres Bremsdrehmoment zu erzielen.
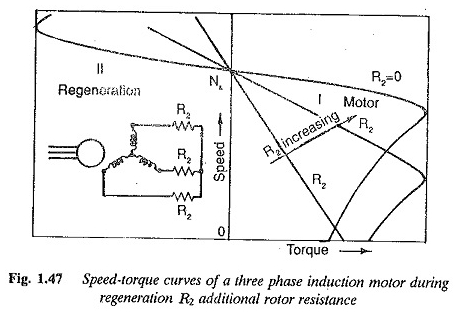
Regeneratives Bremsen ist auch mit einem Pole -Wechselmotor möglich, wenn die Geschwindigkeit von hoch zu niedrig gestiegen ist. Es kann auch in einem variablen Frequenzleser erreicht werden.
Durch die vorübergehende Verringerung der Frequenz des Motors nimmt die Synchrongeschwindigkeit ab und die für die Regeneration günstigen Bedingungen.
Während des regenerativen Bremsen besteht die Möglichkeit gefährlicher Geschwindigkeiten, wenn der Betriebspunkt während des Brems in den instabilen Teil des Merkmals fällt. Dies geschieht, wenn das Ladedrehmoment größer ist als das Drehmoment des Motorausfalls.
Das entwickelte Drehmoment kann den Motor nicht verlangsamen und eine übermäßige Beschleunigung findet statt. Diese Möglichkeit kann mittels hoher Resistenz im Rotor beseitigt werden.
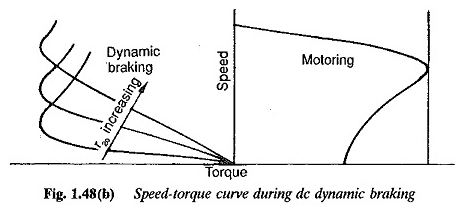
Dynamisches Bremsen
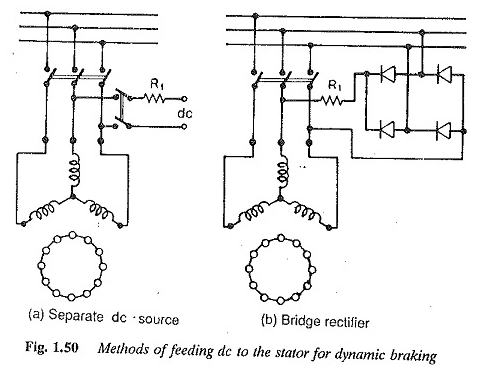
Dynamisches Bremsen wird verwendet, um einen nicht umkehrenden Leser zu bremsen. Der Stator wird vom Sektor AC auf Hauptgerichte übertragen (Abb. 1.48 (a)). Der DC, der den Stator überquert, installiert ein stationäres Feld. Dies führt zu Rotorströmen, die ein Paar erzeugen, um den Rotor schnell zu bringen.
Das Drehmoment hat sich entwickelt und die Verzögerung während des Brems kann durch die Menge an Leistung DC gesteuert werden. Zusätzlicher Widerstand R1 und R2E im Stator- und Rotorschaltungen steuern die DC -Anregung und die Bremsungspaare.

Der äquivalente Schaltkreis und das Motorphasendiagramm während der dynamischen Bremsung sind in Abbildung 1.48 (c) dargestellt. Wenn der Stator von DC betrieben wird, ist das MMF -Produkt stationär. Diese MMF hängt von Statorverbindungen für die Gleichstromversorgung, die Anzahl der Runden und den Strom ab.
Mögliche Statorverbindungen für die DC -Stromversorgung sind in Abbildung 1.49 dargestellt. Der äquivalente CC -Strom kann durch Assimilation der durch diesen äquivalenten Strom und des CA -Strom erzeugten MMFs bestimmt werden.
Der äquivalente Primärstrom ist für die Magnetisierung und den Sekundärstrom des Drehmoments verantwortlich. Das Paar wird gegeben von

Wo ist eine Verschiebung?
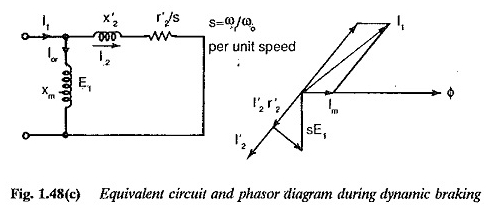
Der äquivalenten Schaltung, die wir haben

Auch aus dem Phasendiagramm haben wir
![]()
Von dem MI bestimmt werden kann. Der Wert von XM ist gegeben durch
![]()
Das Paar ist

Die Drehmomentschiebkurve kann unter Verwendung dieses Ausdrucks bestimmt werden. Das maximale Drehmoment tritt bei einer Verschiebung auf

Und das maximale Bremsdrehmoment ist

Das Merkmal kann auch mit der Beziehung gezeichnet werden

Das Bremsdrehmoment ist proportional zu i21. Die Sättigung spielt jedoch eine eigene Rolle und es gibt die Erschöpfung eines Paares. Der Effekt von R’2 ähnelt den Effekten beim Fahr
Es ändert nicht den Wert von TMB, sondern den Wert der Geschwindigkeit, mit der das TMB auftritt. Die typischen Geschwindigkeitsgeschwindigkeitskurven sind in Abbildung 1.48 dargestellt.
Die Werte von I1 und R’2 werden kontrolliert, um das gewünschte Bremsen zu liefern. Die erste ist durch R1 begrenzt. Diese Methode wird im Allgemeinen angewendet, um Motoren zu verlangsamen, die aktive Lasten verursachen. Dynamisches Bremsen wird gemeinsam mit automatischer Steuerung verwendet. Die Bremsung des Induktionsmotors ist aufgrund dieser Funktionalität in Palans beliebter als der DC -Motor.
Die Versorgungsmethoden eines Stators Direct Netzteil sind in Abb. 1,50 dargestellt. Es kann durch eine CC -Stromversorgung mit einem begrenzten Widerstand R1 in der Schaltung bereitgestellt werden, um die DC -Aufregung zu steuern. Die Drehmomentregelung wird durch Variation des Rotorwiderstands erhalten.
Alternativ kann eine Stromversorgung mittels eines Diodengleichrichters behoben werden und der resultierende Gleichstrom kann auf den Motor übertragen werden.
In der dynamischen Wechselstrombremse ging der Stator an eine Kapazitätsbank. Die Maschine arbeitet als angeregter Autoinduktionsgenerator. Die gesamte mechanische Energie wird in Form von elektrischer Energie im Rotorwiderstand abgeleitet. Diese Methode ist aufgrund der Kosten der Kondensatoren nicht profitabel.
Aktuell
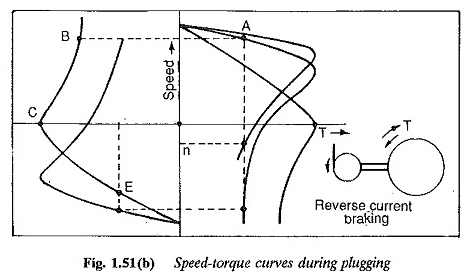
Durch das Modifizieren der Phasensequenz des Eingangs in ein Bremsautomotor -Motor kann die Statorfeldsteuerung umgekehrt werden. In der Praxis erfolgt dies durch den Austausch der Stromversorgung des Motors (Abb. 1.51 (a)).
Das Bremsmoment wird entwickelt und der Motor ruht sehr schnell. Der Motor muss aus dem Sektor gelöscht werden, wenn keine Geschwindigkeit angezeigt wird. Andernfalls beschleunigt das entwickelte Drehmoment den Motor in die entgegengesetzte Richtung. Diese Methode wird auch als Plugs bezeichnet.
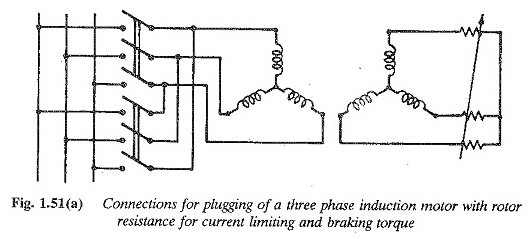
Wenn der Motor blockiert ist, kann die Spannung E im Rahmen und die angelegte Spannung V gegenseitig und der Strom während des Brems durch E + V verursacht werden.
Dies kann zu sehr hohen Strömen führen, die durch einen hohen Rotorwiderstand begrenzt sind und das Bremsdrehmoment effektiv erhöhen.
Die Getriebegeschwindigkeitskurve eines Induktionsmotors kann durch Variation des Widerstands zum Rotor geändert werden. Der maximale Drehmomentpunkt kann im 1-2-Schichtstrand erfolgen, wo das entwickelte Paar dazu neigt, den Rotor zu bremsen.
Dieses Drehmoment kann auch verwendet werden, um den Rotor -Trend aus einem oder anderen Grund zu beschleunigen (z. B. die Motorrevision oder ein Hinweis, der den leeren Käfig erhöht).
Ein hoher Widerstand wird in den Rotor eingeführt, so dass sich der Betriebspunkt zum vierten Quadranten bewegt. Das entwickelte Bremsdrehmoment verhindert eine Beschleunigung des Rotors und der Rotor arbeitet mit gleichmäßiger Geschwindigkeit (Abb. 1.51 (b)).
Wenn der Motor zum Zeitpunkt des Steckers bei einer Verschiebung arbeitet, ist das Gesamtbremsdrehmoment die Summe des Verbindungsdrehmoments auf (2 – s) und das Ladedrehmoment

TP kann durch einen variablen Rotorwiderstand gesteuert werden, der den Bremsstrom begrenzt.