Triphase Induction Motor Speed Control:
Das Problem der Steuerung der Dreiphasen -Induktionsmotordrehzahl ist von großer praktischer Bedeutung.
In einer Reihe von Branchen müssen Motoren sowohl im Hinblick auf die Reichweite als auch in Bezug auf die Süße der Kontrolle und auch in Bezug auf die wirtschaftliche Funktionen sehr strenge charakteristische Anforderungen erfüllen.
Aus Sicht der Sicht der Geschwindigkeit der Eigenschaften der dreiphasigen Induktionsmotor sind die Induktionsmotoren niedriger als die DC -Motoren.
Die Geschwindigkeit eines Shunt -CC -Motors kann zwischen einem weiten Bereich mit gutem Effizienz und einer guten Geschwindigkeitsregulierung angepasst werden. In Induktionsmotoren kann die Geschwindigkeit jedoch nicht variiert werden, ohne die Effizienz und eine gute Geschwindigkeitsregulierung zu verlieren.
Die Geschwindigkeit eines Induktionsmotors wird durch den Ausdruck gegeben

Somit gibt es drei Faktoren, nämlich die F -Leistungsfrequenz F, die Anzahl der Ple Pôles P und die Schleims S, von der die Geschwindigkeit eines Induktionsmotors abhängt. Um die Geschwindigkeit eines Induktionsmotors zu ändern, ist es daher wichtig, mindestens einen der drei oben genannten Faktoren zu ändern.
Die dreiphasigen Induktions -Motor -Geschwindigkeitsregelmethoden werden je nach Hauptaktion auf dem Motor unterschieden: (i) auf der Statorseite und (ii) auf der Seite des Rotors.
Verschiedene Methoden zur Steuerung der Geschwindigkeit der dreiphasigen Induktionsmotor auf der Statorseite sind (a) die Variation der Versorgungsfrequenz (b) die Variation der angewendeten Spannung und (c) durch Modifizierung der Anzahl der Pole.
Auf der Seite des Rotors kann die Geschwindigkeit gesteuert werden (a) durch Modifizieren des Widerstandes im Rotorschaltungsschaltgerät und (b) durch Einführung in den Rotorschaltkreis eine zusätzliche EMK der gleichen Frequenz wie die grundlegende EMF des Rotors.
Für diese neueste Methode der dreiphasigen Induktionsmotoren sind eine zusätzliche elektrische Maschine oder mehr dieser Maschinen erforderlich.
Ein Set, der aus einem regulierten Induktionsmotor und einer oder mehreren zusätzlichen elektrischen Maschinen besteht, die elektrisch oder mechanisch daran angeschlossen sind, wird als Kaskade bezeichnet. Schaltmaschinen werden üblicherweise als zusätzliche Maschinen verwendet.
1. Geschwindigkeitsregelung durch Variation der Versorgungsfrequenz
Diese Dreiphasen -Induktionsmotor -Steuerungsmethode bietet einen Weitgeschwindigkeitskontrollbereich mit einer fortschreitenden Geschwindigkeitsschwankung in diesem Strand. Die Hauptschwierigkeit bei dieser Methode besteht darin, die Ernährung in variabler Frequenz zu erhalten.
Die für diesen Zweck erforderlichen Hilfsgeräte führt zu hohen Erstkosten, erhöhten Wartung und einem Rückgang der Gesamteffizienz. Aus diesem Grund wird diese Methode für die allgemeine Verwendung nicht für Geschwindigkeitsregelanwendungen verwendet.
Trotz der Tatsache, dass dieses Diagramm kompliziert ist, gibt es bestimmte Anwendungen, in denen sein breiter Geschwindigkeitsbereich und die gute Geschwindigkeitsregulierung dauerhaft sehr wünschenswert sind.
Wenn ein Induktionsmotor mit unterschiedlichen Frequenzen mit praktisch konstanten Effizienzwerten, Leistungsfaktor, Überlastkapazität und einer konstanten absoluten Verschiebung arbeiten muss, ist es mit ungesättigten Eisen wichtig, dass die Versorgungsspannung proportional zur Frequenz der Stromversorgung variiert.
Diese Art von Variation kann beispielsweise auftreten, wenn der Leistungsgenerator entweder aufgrund momentaner Überladungen oder aufgrund einer erheblichen Geschwindigkeitsregulierung Geschwindigkeitsschwankungen unterliegt. Die Spannung und die Ausgangsfrequenz variieren sowohl als Geschwindigkeit, wenn keine automatische Korrektur vorgesehen ist.
Bei einem bestimmten großen Meerestraining sind die Motoren des Propellers von der Art der Induktion und werden von einer solchen lokalen Stromversorgung mit Synchrongeneratoren mit Turbinen mit variabler Geschwindigkeit gesteuert.
Auch in solchen Fällen ist der Geschwindigkeitsvariationsbereich begrenzt, da die Effektivität der Hauptmotoren schnell mit der Geschwindigkeitsänderung im Vergleich zu ihrer Gestaltung fällt.
Typische Geschwindigkeitsgeschwindigkeitskurven für vier verschiedene Frequenzen sind in Abbildung 1.25 dargestellt.

2. Geschwindigkeitskontrolle durch Variation der Versorgungsspannung
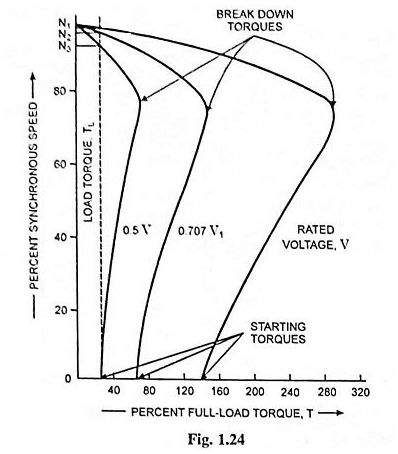
Es handelt sich um eine Schiebeteuermethode mit einer variablen konstanten Frequenzversorgungsspannung. Bei dieser Methode zur Steuerung der Geschwindigkeit der Induktionsmotoren ist die auf den Stator angelegte Spannung variiert, um die Geschwindigkeit zu variieren.
This Method of Speed Control of Three Phase Induction Motor is Simple, Low in First Cost and has long maintenance cost it has limited use because the operation at Voltages exceeding rated voltage is restricted by magnetic saturation, (ii) a large change in voltage (III) The Developed Torque Reduces Greatly With The Reduction in Supply Voltage and the Motor Come To Standstill If the Load Torque Exceds The Pull-Out The engine torque corresponding to a reduced power tension and (IV) The Der Geschwindigkeitsregelbereich ist in der Richtung nach unten sehr begrenzt, dh nominelle Geschwindigkeit bei niedrigeren Geschwindigkeiten.
Im Allgemeinen wird diese Dreiphasen -Induktionsmotor -Steuerungsmethode nur bei Lasten verwendet, bei denen das erforderliche Drehmoment erheblich fällt, wenn die Geschwindigkeit verringert wird, wie bei kleinen Käfigmotoren von Eichhörnchen, die die Lüfter führen.
Die variable Spannung kann mittels gesättigter Reaktoren, Variacs oder Transformatoren mit einer Verschiebungsänderung erhalten werden.
Die Eigenschaften der Beschleunigung mit reduzierten Spannungen sind in Abbildung 1.24 dargestellt.
3. Geschwindigkeitsregelung durch Modifizierung der Anzahl der Pole
Diese Methode gilt leicht für Eichhörnchen -Käfigmotoren, da eine Käfigwicklung automatisch reagiert, um die gleiche Anzahl von Polen wie der Stator zu erstellen.
Diese dreiphasige Induktionsmotor -Steuerungsmethode ist mit den Wurzelmotoren von Wunden im Allgemeinen nicht möglich. In diesen Maschinen würde diese Methode erhebliche Komplikationen von Konstruktion und Umschaltung beinhalten, da Verbindungen von Primär- und Sekundärstücken gleichzeitig modifiziert werden sollten, um die gleiche Anzahl von Polen in den beiden Wicklungen zu erzeugen. Andernfalls wird ein negatives Paar von einigen Rotor -Fahrergurten entwickelt.
Die Anzahl der Polepaare im Stator kann wie folgt geändert werden:
(a) Unter Verwendung mehrerer Statorwicklungen: Bei dieser dreiphasigen Induktionsmotor -Kontrollmethode werden zwei oder mehr unabhängige Wicklungen, jede Verletzung einer anderen Anzahl von Polen, in denselben Spielautomaten platziert. Die Anzahl der Statorwicklungsposten ist darin
In keinem Fall voneinander verbunden und kann nicht willkürlich gemäß den Betriebsbedingungen dieses Motors ausgewählt werden.
Beispielsweise kann ein Zweigeschwindigkeitsmotor zwei Statorwicklungen, eine Verletzung für 4 Pfosten und eine andere für 6 Pole haben, die synchrone Geschwindigkeiten von 1.500 U / min und 1000 U / min mit einer Stromfrequenz von 50 Hz erzeugt.
Manchmal werden auch Motoren mit vier unabhängigen Statorwicklungen verwendet und verleihen vier synchrone Geschwindigkeiten (und daher laufen). Natürlich wird gleichzeitig eine Wicklung verwendet, wobei die anderen völlig ineffektiv sind.
Die Änderung von einer Geschwindigkeit zur anderen kann von einem mechanischen Schalter oder von Schützen durchgeführt werden. Bei einer solchen Anordnung müssen Wickeln oder Wicklungen, die nicht verwendet werden, durch den Schalter geöffnet oder zumindest in einem Stern gelassen werden.
Andernfalls würde aufgrund der Wirkung des Transformators die mit der Nahrung verbundene Wicklung Spannungen in der inaktiven Wicklung induzieren und aufgrund der folgenden zirkulierenden Ströme eine Überhitzung verursachen.
Die Regulierung selbst entspricht der Änderung der Geschwindigkeit des Motors in Schritten, da die eine oder andere Wickelung des Stators mit dem Stromsektor verbunden ist.
Bei jeder Änderung befindet sich der Motor unter Bedingungen, die den Abflugbedingungen im Wesentlichen ähnlich sind, dh einen signifikanten Strom und ein reduziertes Drehmoment. Aufgrund inaktiver Treiber erfordert diese Methode zur Änderung des Posts einen großen Stator, den ein Motor mit einer einzigen Geschwindigkeit derselben Note.
Diese Methode wurde für Aufzugsmotoren, Traktionsmotoren und auch für kleine Motoren zum Antrieb von Werkzeugmaschinen verwendet.
(b) Wesentliche Polmethode: Die Methode zur Änderung der Pole zur Steuerung der Geschwindigkeit der Dreiphasen-Induktion-Engine, die oben in (a) dh die Methode zum Wickeln des Mehrfachstators beschrieben wurde, wird nur in kleinen Motoren verwendet.
In großen Motoren ist es angemessener, eine wesentliche Pole -Technik zu verwenden, die die Notwendigkeit beseitigt, mehrere Statorwicklungen zu haben, um die Anzahl der Statorzentren zu ändern.
Diese dreiphasige Induktionsmotor -Steuerungsmethode verwendet die gesamte Wickel für jede Geschwindigkeit. Normalerweise werden die aufeinanderfolgenden Spulengruppen für einen einzelnen Geschwindigkeitsmotor zusammengerollt, um nacheinander entgegengesetzte Polaritätszentren zu schaffen. Dies ist in Abbildung 1.83 dargestellt, in der eine Phase einer Vierschaltwickung entwickelt wird.
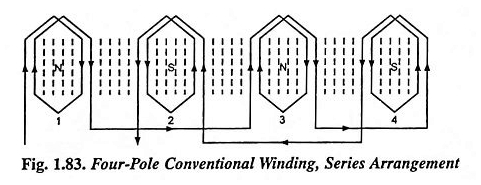
Es ist zu beachten, dass alle Spulen in Reihe sind, aber dass die endgültigen Verbindungen zu alternativen Gruppen hergestellt werden, dh Gruppe 1 in Gruppe 3 und Gruppe 4 in Gruppe 2.
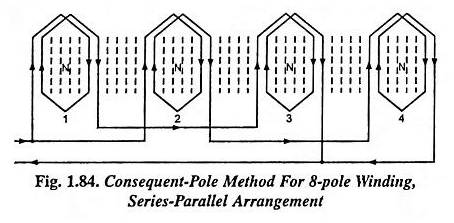
Jetzt können die endgültigen Verbindungen der Gruppen mit denselben Spulen so geändert werden, dass aufeinanderfolgende Spulen der gleichen Polarität aufweisen, wie in Abbildung 1.84 dargestellt.
Parallel zu den Serienverbindungen der Gruppen 2-4 mit diesen Gruppen 1-3 hat sich die Polarität der Gruppen 2 und 4 geändert, so dass es jetzt vier aufeinanderfolgende Nordpolen gibt.
Infolge dieser südlichen Pole werden zwischen den einzelnen Nordpolen erzeugt, und der Motor hat jetzt eine 8 -Gol -Wicklung.
Für eine 50 -Hz -Stromversorgung ergibt die Anordnung der Serie eine synchrone Geschwindigkeit von 1.500 U / min, während die Anordnung der Parral -Serie eine synchrone Geschwindigkeit von 750 U / min ergibt.
Es ist auch möglich, eine serielle parallele Anordnung für die 4 -Gol -Wicklung zu verwenden und sich dann für die 8 -Gol -Wicklung in der Serie zu bewegen. Eine Schaltung, um eine dreiphasige Wicklung der Wicklung von 2 bis 4 Pfosten zu ändern, ist in Abbildung 1.85 dargestellt.
Durch die Wiederverbindung aller Gruppen von Spulen für die gleiche Polarität wirkt der Stator so, als hätte er doppelt so viele Pole wie die Gruppen von Polen. Die so erzeugten zusätzlichen Pole werden als wesentliche Pole bezeichnet, und die Wicklung wird als aufeinanderfolgende Postwicklung bezeichnet.
Durch eine einzelne Schaltanordnung ist es möglich, die Standard- (oder herkömmliche) Verbindung auf einer Seite eines Doppelstartschalters und die Verbindung des wesentlichen Pfostens auf der anderen Seite des Schalters zu haben.
Somit können zwei Geschwindigkeiten erhalten werden, eine höhere Geschwindigkeit mit herkömmlicher Verbindung und einen halben Druck mit einer erheblichen Verbindung durch Pol.

In Motoren, die die wesentliche Pole -Technik zur Geschwindigkeitskontrolle verwenden, wird das bestmögliche Design im Allgemeinen bei beiden Geschwindigkeiten nicht erhalten.
Mit anderen Worten, die wünschenswerten Eigenschaften wie der hohe Leistungsfaktor werden mit einer Geschwindigkeit geopfert, so dass ein einigermaßen guter Leistungsfaktor mit der anderen Geschwindigkeit erhalten wird.
Manchmal sind die Statorverbindungen gleichzeitig von Delta zu Stern gegangen, mit denen die Postverbindungen geändert werden. Dies ändert die Spannung und ermöglicht einen besseren Motor bei jeder Geschwindigkeit.
Zwei Geschwindigkeitsmotoren werden im Allgemeinen mit einer Wicklung am Stator hergestellt, wobei die Anzahl der Pole im Verhältnis 1: 2 modifiziert wird. Die drei und vier Geschwindigkeitsmotoren sind mit zwei Wicklungen für die Statistik bereitgestellt. Eine oder beide werden durch Änderung der Anzahl der Pole hergestellt.
Zum Beispiel, falls gewünscht, einen Motor für vier synchrone Geschwindigkeiten zu erhalten; 1500, 1.000, 750 und 500 U / min müssen zwei Wicklungen auf den Stator platziert werden, von denen einer 4 und 8 Pfosten enthält und das andere 6 und 12 Pole geben.
Unter Verwendung einer parallelen Verbindung in der Reihe einzelner Phasengruppen können die Phasen selbst im Stern / Delta angeschlossen werden, was zu einem Zweigang-Betrieb mit den drei Arten von Drehmomentdrehzahlmerkmalen führt, nämlich konstanter Drehmoment, konstanter Leistung und variabler Drehmoment.
Aufgrund der Komplikationen bei der Auslegung und dem Umschalten der Statorwicklung ist es dank dieser Geschwindigkeitssteuermethode nicht möglich, mehr als vier Geschwindigkeiten für einen Motor zu erhalten. Diese Methode bietet auch keine progressive Geschwindigkeitskontrolle.
Aus diesem Grund wird diese Methode für die allgemeine Verwendung nicht für Geschwindigkeitsregelanwendungen verwendet.
Diese Methode ist jedoch sehr zufriedenstellend für Anwendungen wie Lüftungsventilatoren, Förderer, Werkzeugmaschinen oder andere Anwendungen, für die nur zwei oder vier ungefähr konstante Betriebsbetrieb benötigt wird.
Diese Methode hat den Vorteil der Einfachheit, eine gute Geschwindigkeitsregulation für jede Anpassung, hohe Effizienz und moderate Anfangskosten und -wartung.
Die Anzahl der Polepaare am Stator kann auch unter Verwendung der Amplitudenmodulationstechnik der Pole geändert werden – eine Technik der Modulation der Entfernung von portischen Inhabern.
Diese Methode zur Änderung des Posts hat den Vorteil, dass das Verhältnis der beiden verfügbaren Geschwindigkeiten nicht unbedingt 2: 1 beträgt wie bei der wesentlichen Pol -Methode.
4. Statorimpedanzkontrolle
Eine reduzierte Spannung an den Maschinenklemmen kann durch Einsetzen eines ausgewogenen Widerstands oder der in Serie mit jedem Statordraht einfügen. Unter solchen Bedingungen hängt die Motoranschlussspannung vom Motorstrom ab und die Spannung ändert sich mit der Beschleunigung des Motors. Die Merkmale des Drehmoments bei typischer Geschwindigkeit sind in Abbildung 1.86 dargestellt.
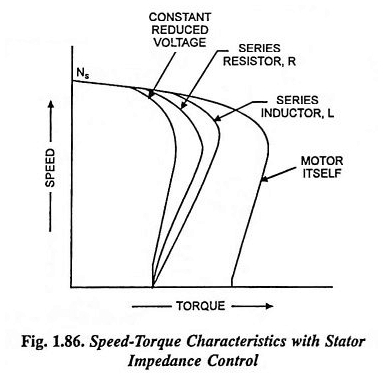
Wenn die Impedanz (R oder X) so angepasst wird, dass das gleiche Startdrehmoment liefert, hätte das Merkmal der Kükengeschwindigkeit bei der Zugabe von Induktivität ein größeres Drehmoment als mit zusätzlichem Widerstand.
Darüber hinaus ermöglichen diese beiden Merkmale wir größere Paare als diejenigen, die mit der Eigenschaft mit einer reduzierten angelegten Spannung erhalten wurden, für das gleiche Startdrehmoment.
Die Einführung des Widerstands in den Statorschaltkreis verbessert den Leistungsfaktor, jedoch zum Preis höherer Energieverluste.
5. Geschwindigkeitsregelung durch Variation des Rotorwiderstands (oder Rotorwiderstandsregelung)
Die Wurzelmotoren der Wunden werden im Allgemeinen durch den Zusammenhang der Startwiderstände im Sekundärschaltungskreis eingeführt, die sich mit dem Motor beschleunigt.
Wenn die ohmischen Werte dieser Widerstände ordnungsgemäß ausgewählt werden und diese Widerstände für den kontinuierlichen Betrieb ausgelegt sind, können sie für das Doppelziel verwendet werden, um die Geschwindigkeit zu starten und zu steuern. Auch offensichtlich kann diese Methode auf die allein gewickelten Rotormotoren angewendet werden.
Die Weichheit der Geschwindigkeitskontrolle hängt von der Anzahl der Phasen der verfügbaren Widerstände ab. Die Steuerung wird in Richtung der Grundgeschwindigkeit angezeigt. Der Geschwindigkeitsregelbereich ist nicht konstant und hängt vom Wert der Last ab.
Diese Geschwindigkeitskontrollmethode hat ähnliche Eigenschaften wie die SHUNT DC -Motordrehzahl mittels Serienwiderstand mit dem Rahmen. Seine Hauptnachteile sind eine geringere Effizienz und eine schlechte Geschwindigkeitsregulation, da der Rotorwiderstand gegen Einstellungen mit niedriger Geschwindigkeit erhöht wird.
Beispielsweise beträgt bei 50% der Synchrongeschwindigkeit die Effektivität des Rotors nur 50% und die Effizienz des Motors wäre etwas geringer. Die Geschwindigkeitsschwankung ist nur auf einen Bereich von 50 bis 100% begrenzt.
Flüssige Rheostate werden metallischen Rheostaten bevorzugt, da sie keine Induktivität haben und die Widerstände durch ein gleichmäßiges Drehmoment sanft geschnitten werden können.
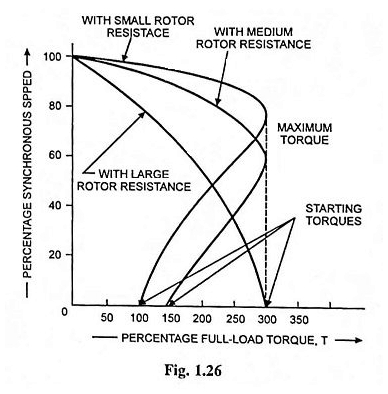
Die Einführung von externen Widerständen in der Rotorschaltung eines Induktionsmotors mit Gleitring modifiziert die in Abbildung 1.26 dargestellten Geschwindigkeits-Plot-Eigenschaften.
Diese Dreiphasen -Induktion -Motor -Steuerungsmethode als solche ist daher nicht geeignet, um die Geschwindigkeit zu einem konstanten Drehmoment zu steuern.
Diese Methode wird jedoch häufig für Lasten verwendet, bei denen das erforderliche Paar erheblich fällt, wenn die Geschwindigkeit verringert wird, z. B. Lüfterlasten, bei denen der Fütterungseintrag erheblich sinkt, wenn die Geschwindigkeit verringert wird, was wiederum die Kupferverluste des Rotors verringert.
Darüber hinaus wird diese Methode nicht zur kontinuierlichen Geschwindigkeitskontrolle angewendet, sondern für den intermittierenden Betrieb (kurze Zeit) bevorzugt. Eine solche Geschwindigkeitskontrollmethode wird in der Praxis häufig verwendet, für Motoren mit niedriger Leistung und in Luftkranen.
Es wird jedoch manchmal für die Regulierung der Geschwindigkeit der Walzen verwendet, insbesondere dort, wo sie mit Rüschen geliefert werden, um die Ladespitzen in der Schaltung zu reduzieren.
Hier ist der Rheostat, der als Tempomat bezeichnet wird, automatisch, wenn die Last zunimmt, und daher nimmt die Geschwindigkeit ab und ein Teil der Last wird zum Nachteil der kinetischen Energie des Lenkrads ausgeglichen.
Wenn die Last abnimmt, wird der Widerstand gegen den Rotorkreis reduziert. Die Geschwindigkeit steigt und das Lenkrad beginnt kinetische Energie zu speichern.
6. Sekundäre Fremdspannungskontrolle
Bei dieser Methode wird die Geschwindigkeit eines Induktionsmotors durch Injektion einer Schiebfrequenzspannung in den Sekundärschaltkreis gesteuert.
Wenn die injizierte Spannung im Rahmen der EMF in der Sekundärschaltung in Einklang steht, entspricht sie einer Abnahme des Widerstands im Sekundärkreis. Daher nimmt die Verschiebung ab oder die Geschwindigkeit steigt.
Es ist möglich, supersynchrone Geschwindigkeiten zu erreichen, indem eine Schiebfrequenzspannung in der Phase mit dem in der Rotorschaltung induzierten CMF induziert wird.
Wenn sich die injizierte Spannung in der Oppositionsphase gegen die EMF in der Sekundärschaltung befindet, entspricht sie dem Erhöhung des Widerstands im Sekundärschaltung, was zu einer Erhöhung des Gleitens oder einer Verringerung der Geschwindigkeit führt.
Somit ist nach dieser Methode ein breites Bereich der Geschwindigkeitsregelung möglich, indem Frequenzumwandlungsgeräte in die Rotorschaltung aufgenommen werden.
Bei dieser Methode werden die Nachteile niedrigerer Effizienz und schlechter Geschwindigkeitsregulierung überwunden, aber im Allgemeinen werden mehr Hilfsmaschinen in die Sekundärschaltung einbezogen.
Es wurden verschiedene Methoden entwickelt, um die Geschwindigkeit von Induktionsmotoren zu kontrollieren, indem eine Gleitfrequenzspannung in die Sekundärschaltung injiziert wird.
Die verschiedenen Methoden variieren in ihren Anforderungen an Hilfsgeräte. Von der Einbeziehung der Hilfsgeräte in die Konstruktion des Einführungsmotors selbst in ein ziemlich kompliziertes System von Hilfsmaschinen und einstellbaren Verhältnistransformatoren.
Das grundlegende Kriterium, das ein solches System füllen muss, lautet: (i), dass die variable Fremdspannung eine Gleitfrequenz aufweist, dh eine Frequenz, die SF entspricht, und (ii) die mit der Fremdspannung verbundene Energie wiederhergestellt ist.
Die häufigsten Systeme, die auf diesem Prinzip basieren, sind das Kramer -System, das Leblanc -System und das Scherbius -System der Geschwindigkeitskontrolle von Polyphase -Induktionsmotoren.
7. Geschwindigkeitskontrolle durch Verkettung
Bei dieser Methode sind zwei Motoren erforderlich, von denen mindestens einer einen Wundrotor haben muss. Die beiden Motoren können mechanisch gekoppelt werden, um eine gemeinsame Belastung zu verursachen.
Wenn die Wicklung des Stators eines von ihnen, eines Wundrotormotors, an die dreiphasige Wechselstromversorgung angeschlossen ist und seine Rotorwicklung mit der Wicklung des zweiten Motorstators angeschlossen ist, wird die Geschwindigkeit der Kombination durch die Summe oder die Differenz der Anzahl der Polen in den beiden Maschinen bestimmt.
In der Praxis ist es üblich, den Rotorausgang der ersten Maschine von der zweiten Maschine so an den Stator zu verbinden, dass die Drehfelder der beiden in derselben Richtung sind. In diesem Zustand wird die resultierende Geschwindigkeit durch den folgenden Ausdruck bestimmt.

Oder
- F ist die Lebensmittelfrequenz,
- P1 und P2 sind die Anzahl der Pole auf den Maschinen I und II.
Um eine Geschwindigkeit über dem Normalwert zu erhalten, wird das Drehmoment des zweiten Motors durch einfaches Modifizieren von zwei der Gewinde des zweiten Motors umgekehrt. Dies wird als Differentialwasserfall bezeichnet und wird unter diesem Zustand des Zustands durch den Ausdruck gegeben.

Eine zusätzliche Geschwindigkeitsregelung kann, falls Sie möchten, erhalten, indem auch eine zweite Maschine des Maschinens und ein Einfügen von Kontrollwiderstand in die Rotorschaltung der zweiten Maschine eingesetzt wird.

Wenn die beiden Motoren die gleiche Anzahl von Polen haben und in kumulativen Kaskaden verbunden sind [Gl. (1.77)] werden sie fast halb halb halb betrieben. Da das Drehmoment des Baumes in Differentialkaskade weitgehend reduziert ist, wird er in der Praxis nicht verwendet.
Der mechanische Ausgang der beiden Maschinen liegt ungefähr im Bericht von

oder p1: p2, das heißt im Verhältnis der Anzahl der Pole auf den Maschinen.