Dreiphasen -Induktionsmotoren:
Die dreiphasigen Induktionsmotoren sind zwei Arten: die Eichhörnchenbox und den Rotor der Wunden.
Im Eichhörnchen-Cage besteht der Rotor aus Längsfahrerstäben, die an beiden Enden, während im Motor des Wundrotors kreisförmige Steckverbinder kurzreißt, der Rotor auch eine ausgewogene Drei-Phasen-Wicklung mit dem gleichen Pfosten wie die Statorwicklung hat. In beiden Fällen trägt der Stator jedoch eine dreiphasige verteilte Wicklung.
Analyse und Leistung:
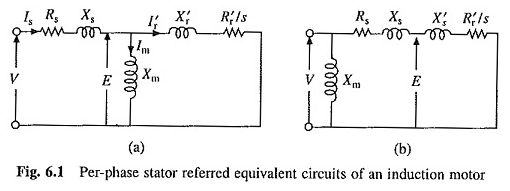
Der Schaltkreis entspricht einer Phase eines Dreiphasen -Induktionsmotors ist in Abbildung 6.1 (a) dargestellt. R’R und X’R sind die verweisten Werte des Stators des Widerstands des RR -Rotors und die Reaktanz des Rotor XR. Die Verschiebung wird durch definiert durch

wobei ωm und ωms Rotor- und Synchrongeschwindigkeiten sind. Weiter

wobei F und P die Lebensmittelfrequenz bzw. die Anzahl der Stangen sind.
Da der Impedanzabfall des Stators im Vergleich zu terminaler V -Spannung V im Allgemeinen vernachlässigbar ist, kann die äquivalente Schaltung zu dem in Abbildung 6.1 (b) gezeigt werden.
Auch der Gleichung. (6.1)
![]()
In Abbildung 6.1 (b),,

Strom übertragen in den Rotor (oder Luftstrom)
![]()
Der Kupferverlust des Rotors ist
![]()
Elektrische Leistung in mechanische Leistung umgewandelt

Drehmoment durch Motor entwickelt
![]()
Gleichungen ersetzen. (6.3) und (6.7)

Ersetzen der Gleichung. (6.4) gibt
Ein Vergleich der Gleichungen. (6.5) und (6.9) schlagen vor

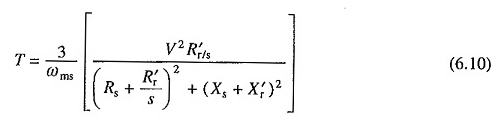
Das Motorausgangsdrehmoment am Baum wird durch Abzug Paare der Reibungsdrift und des Kernkerns vom entwickelten Drehmoment erhalten.
Das entwickelte Drehmoment hängt nur vom Gleiten ab (Gleichung (6.10)). Die Differenzierung von T in (6.10) in Bezug auf S und Assimilat auf Null ergibt die Verschiebung für ein maximales Drehmoment 
Ersetzen der Gleichung. (6.12) in (6.10) ergibt einen Ausdruck für maximales Drehmoment

Das maximale Drehmoment wird auch als Fehlerdrehmoment bezeichnet. Obwohl es unabhängig vom Rotorwiderstand ist, ist SM direkt proportional zum Widerstand gegen den Rotor.
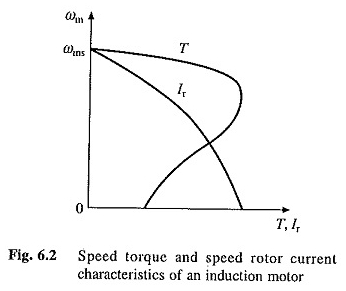
Die Natur der Geschwindigkeits- und Geschwindigkeitsgeschwindigkeitseigenschaften sind in Abbildung 6.2 dargestellt. Der Rotorstrom und das Drehmoment sind bei synchroner Geschwindigkeit Null. Bei einer Geschwindigkeitsabnahme steigen beide.
Während sich das Paar nach Erreichen des Breakdown -Werts reduzierte, erhöht sich der Rotorstrom weiter und erreicht den Maximalwert bei Nullgeschwindigkeit. Der Abfall der Geschwindigkeit der Volllastlast hängt vom Rotorwiderstand ab.
Wenn der Rotorwiderstand niedrig ist, ist der Tropfen recht klein und daher arbeitet der Motor hauptsächlich mit konstanter Geschwindigkeit. Das Fehlerdrehmoment ist ein Maß für die kurzfristige Drehmomentüberlastungskapazität des Motors.
Der Motor arbeitet in Richtung des Drehfeldes. Richtung des Drehfeldes und daher kann die Motordrehzahl durch Umkehr der Phasensequenz umgekehrt werden. Die Phasensequenz kann durch Austausch von zwei Motorklemmen umgekehrt werden.
Manchmal wird das Drehmoment in Bezug auf SM und Tmax ausgedrückt, was nicht nur Berechnungen erleichtert, sondern auch eine schnelle Wertschätzung der Art der Geschwindigkeitsgeschwindigkeitseigenschaften ermöglicht. Teilen Sie die Gleichung. (6.10) durch (6.13) dann die Ausbeuten (6.12) ersetzen
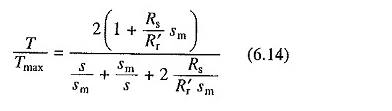
Die Art der Geschwindigkeitsgeschwindigkeitseigenschaften (Abb. 6.2) kann nun leicht durch die Gleichung erklärt werden. (6.14).
Für Verschiebungen, die viel kleiner als SM, dominiert die zweite Amtszeit des Nenner. Daher wird die Geschwindigkeitsgeschwindigkeitsbeziehung von 0 zu einem nominalen Drehmoment ungefähr durch eine gerade Linie dargestellt.
Für Folien, die viel größer als SM, dominiert der erste Term des Nenners und die Geschwindigkeits-Plot-Beziehung hat in dieser Region eine hyperbolische Form.
Während des gesamten Motors des Motorbetriebs ist der Begriff (RSSM / R’R) im Vergleich zu 1 gering und letztendlich im Nenner dominiert. Daher kann es aus der Gleichung gelöscht werden. (6.14). Also

Induktionsmotoren mit speziellen Designs:
Eine Einführungsmotor für den allgemeinen Gebrauch ist so ausgelegt, dass er mit niedriger Folie betrieben wird, um eine gute laufende Leistung zu erzielen. Nach der Notiz variiert die vollständige Last zwischen 2 und 7%.
Ein solcher Motor verfügt über einen hohen Startstrom (5-8-mal) und ein niedriges Startdrehmoment (Volllast bei Vollladungsladedrehmoment der Tickets). Bei einigen Anwendungen muss der Motor unterschiedlich gestaltet werden. Einige von ihnen sind:
Hoch -Slip -Induktionsmotoren:
Bei intermittierenden Ladungsanwendungen, bei denen Start -up und Stop und / oder bei niedriger Geschwindigkeit für längere Zeiträume häufig arbeiten, werden Induktionsmotoren mit hohem Widerstand gegen den Rotor ausgelegt.
Diese Motoren haben einen niedrigen Startstrom und ein Drehmoment mit hohem Start -up, aber eine niedrige Volllast -Effizienz aufgrund eines hohen Rotorkupferverlusts. Da diese Motoren in einer großen Verschiebung (zwischen 10 und 40% bei voller Belastung) arbeiten, werden sie als hohe Schiebermotoren bezeichnet.
Hochschiebende Motoren eignen sich auch für das Training für das Lüfter, bei dem die Geschwindigkeit durch Steuerung der Statorspannung gesteuert wird und zwischen den beiden Quadratkäfigen und dem Wundrotor liegt. Die Art der Schussgeschwindigkeitseigenschaften dieser Motoren ist in Abbildung 6.3 (c) dargestellt.
In den Induktionsmotoren von Eichhörnchenfällen erfolgt eine gute Startleistung (niedriger Startstrom und ein hohes Startdrehmoment), ohne die Volllastleistung durch Verwendung von Tiefenbalken oder Doppelkäfig -Rotor -Motoren erheblich zu beeinflussen.
Die Frequenz des Rotors verläuft von 50 Hz bis 1 bis 3 Hz, wenn die Geschwindigkeit bei Volllast vom Stopp verläuft: Die Variation der Frequenz des Rotors wird in diesen Motoren verwendet, um den Widerstand gegen den Rotor mit hohem Wert bei einem sehr geringen Wert bei voller Geschwindigkeit zu variieren.
Obwohl die Leistung der Start und der niedrigen Geschwindigkeit verbessert wird, wird die Volllastleistung nicht wesentlich durchgeführt.
Stellvertretender Ein Induktions -Induktionsmotor der Eichhörnchen:
Der Maschinenstator ist identisch mit einem Induktionsmotor für den allgemeinen Gebrauch. Der Rotor hat tiefe und schmale Fahrerstangen, wie in Abbildung 6.3 (a) gezeigt.
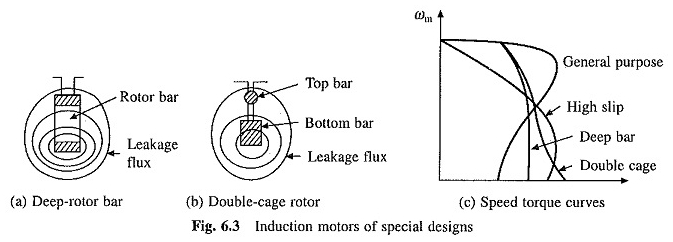
Die von dem Strom in der Balken erzeugten Schlitzaustroms sind ebenfalls in der Abbildung dargestellt. Man kann sich vorstellen, dass die Stange aus einer bestimmten Anzahl von schmalen Schichten besteht, die parallel angeschlossen sind. Vergleichen wir das Verhalten der oberen und unteren Schichten.
Mehr Leckströmungsverbindungen mit der unteren Schicht als die obere Schicht. Folglich hat die untere Schicht eine viel höhere Leckageinduktivität als die obere Schicht. Da die Frequenz des Rotors bei niedriger Geschwindigkeit hoch ist, sind die Reaktanz und die Impedanz der unteren Schicht viel höher als die obere Schicht.
Infolgedessen wird bei niedrigen Geschwindigkeiten die höchste Strommenge durch die höchste und niedrigste Schicht unten transportiert. Aufgrund der ungleichen Verteilung des Stroms durch den Querschnitt des Balkens ist ein wirksamer Widerstand des Rotors hoch und die Start -up -Leistung und bei niedriger Geschwindigkeit verbessert.
Bei einer fast vollen Lastgeschwindigkeit ist die Frequenz des Rotorstroms und die Lecksreaktanz niedrig. Folglich wird der Strom auch über den Querschnitt des Balkens verteilt und der effektive Widerstand des Rotors hat einen niedrigen Wert. Daher wird die Volllastleistung nicht signifikant beeinflusst. Die Art der Motordrehzahlkurve ist in Abbildung 6.3 (c) dargestellt.
Doppel -Eichhörnchen -Rotor -Induktionsmotor:
Der Rotor besteht aus zwei Schichten von Fahrerstäben in jedem Schlitz (Abb. 6.3 (b)), die von Endringen kurzgeschlossen sind. Der obere Balken hat einen kleineren Querschnitt als der Boden. Daher hat es einen höheren Widerstand.
Der untere Balken ist mit einer höheren Menge Leckströmen verbunden als der obere Balken und weist daher eine höhere Induktivität auf. Bei niedriger Geschwindigkeit, für die die Frequenz des Rotors hoch ist, hat der untere Balken eine höhere Impedanz. Daher kreuzt mehr Strom den oberen Balken.
Da der Widerstand des oberen Balkens von guter Start -up -Leistung erzielt wird. Bei hohen Geschwindigkeiten, für die die Frequenz des Rotors niedrig ist, hat der untere Balken eine viel kleinere Impedanz als das Obere.
Infolgedessen wird der Rotorstrom hauptsächlich durch den unteren Balken transportiert und die Volllastleistung bleibt gut, da sie einen niedrigen Widerstand aufweisen. Die Art der Getriebegeschwindigkeitseigenschaften ist in Abbildung 6.3 (c) dargestellt.
Drehmomentmotor:
Die Motoren, die für lange Zeiträume in einem Stillstand oder bei niedriger Geschwindigkeit in einem Zustand arbeiten, werden als Drehmomentmotoren bezeichnet. Sie sind so konzipiert, dass sie das gewünschte Drehmoment mit niedriger Geschwindigkeit bei niedriger Geschwindigkeit entwickeln.
Ihre Geschwindigkeitseigenschaften haben eine negative Neigung, so dass sie einen stabilen Betrieb mit den meisten Lasten mit niedriger Geschwindigkeit bieten. Sie können eine Art Eichhörnchen- oder Rotor -Wunde sein. Piphantierte Induktionsmotoren und einzelne Phasenmotoren sind verfügbar.