Dynamische Induktionsmotorbremse (oder rheostatisches Bremsen):
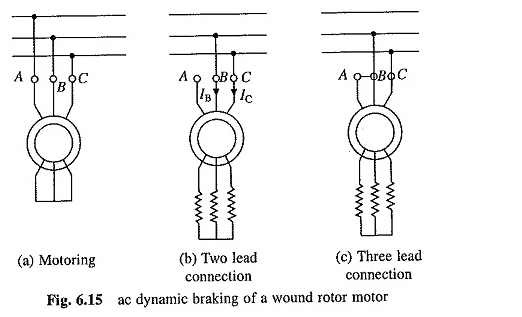
(a) Dynamische Wechselstrombremse – Dynamisches Wechselstrombremsen des Induktionsmotors wird erhalten, wenn der Motor auf einer einzelnen Phasenstromversorgung ausgeführt wird, indem eine Quellphase abgetrennt und geöffnet bleibt (Abb. 6.15 (b)) oder durch Anschließen mit einer anderen Maschinenphase (Abb. 6.15 (c)).
Die beiden Feigenverbindungen. 6.15 (b) und (c) werden jeweils zwei bzw. drei Bleiverbindungen bezeichnet. Wenn der Motor mit einer 1 -Phasen -Stromversorgung verbunden ist, kann er als positive und negative Sequenz in drei Spannungsphasen angesehen werden.
Das von der Maschine erzeugte Netto -Drehmoment ist aufgrund positiver und negativer Sequenzspannungen eine Summe von Paaren. Wenn der Rotor einen hohen Widerstand aufweist, ist das Netto -Drehmoment negativ und der Bremsvorgang wird erhalten. Die Motoranalyse für zwei und drei Bleiverbindungen erfolgt wie folgt:
Zwei Bleiverbindungen: Nehmen wir an, dass Phase A eines Motors, der dort im offenen Stromkreis angeschlossen ist. Dann ia = 0 und ic = -ib. Folglich sind die Komponenten der positiven und negativen Sequenz -IP bzw. in in die durch

wobei α durch die Gleichung gegeben ist. (6.17).
Da die positiven und negativen Sequenzkomponenten gleich und entgegengesetzt sind, können zwei äquivalente Schaltungen mit der Serie -Opposition verbunden werden. Die Spannung, die auf diese serielle Kombination angewendet werden soll

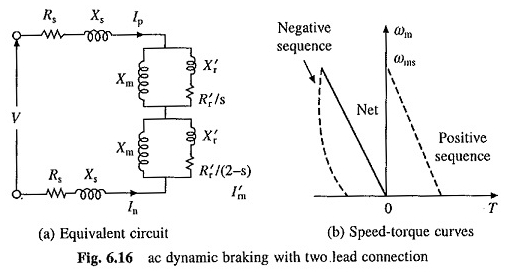
Bei einer angelegten Spannung JVBC / √3 Wenn der Strom ip = – in = jib / √3 ist, folgt er nur mit einer angelegten Phasenspannung V, der Strom wäre ib / √3. Die äquivalente Schaltung kann daher wie in Abbildung 6.16 (a) dargestellt werden.
Obwohl die Werte der positiven und negativen Sequenzkomponenten des Stroms gleich sind, sind es die entsprechenden Paare nicht. Die Art der Geschwindigkeitsgeschwindigkeitskurven für positive und negative Sequenzströme und das Netto -Drehmoment sind in Abbildung 6.16 (b) dargestellt.
Durch angemessene Auswahl des Rotorwiderstands kann das Bremsdrehmoment im gesamten Geschwindigkeitsbereich erzielt werden. Da der Widerstand des erforderlichen Rotors groß ist, kann die Wechselstrombremsung des Induktionsmotors nur in den Wundrotormotoren verwendet werden.
In dieser Hinsicht auf hohe Geschwindigkeiten (oder niedrige Gleitwerte) wird die Impedanz des Teils einer positiven Sequenzkomponente sehr hoch. Da die Komponenten einer positiven und negativen Sequenz des Stroms gleich sein müssen, ist das Nettobremsdrehmoment klein und daher ist die Bremsung nicht sehr effektiv.
Verbindung zu drei Pellets: Hier sind zwei Phasen der Rolle des angeschlossenen Motors mit der dritten Phase parallel angeschlossen (Abb. 6.15 (c)). Verlassen Sie die Phasen A und B

Im Gegensatz zu zwei Bleiverbindungen ist die Größe der Komponenten einer positiven und negativen Sequenz der Spannung gleich und nicht die Komponenten der positiven und negativen Sequenz der Ströme. Die äquivalente Schaltung ist in Abbildung 6.17 dargestellt.
Die Teile einer positiven und negativen Sequenz der Schaltung sind unabhängig, und daher wird die negative Sequenzkomponente des Stroms durch einen positiven Sequenzteil des äquivalenten Kreislaufs keine Einschränkung auferlegt.
Somit werden höhere Bremspaare bei hohen Geschwindigkeiten erhalten (im Vergleich zu zwei Bleiverbindungen). Die Art des Merkmals der Kükengeschwindigkeit mit dieser Verbindung ist die gleiche wie die von Abbildung 616 (b).
Jede Ungleichheit zwischen den Kontaktwiderständen in den Verbindungen von zwei parallelen Phasen reduziert das Bremsdrehmoment und kann sogar zu einem Automobilmoment führen, da der Zustand mehr zu zwei Bleiverbindungen mit zunehmendem Widerstand in einer der beiden Phasen (wie der Widerstand des verwendeten Rotors ist niedriger als die Verbindung zu zwei Blei).
Infolgedessen wird die Verbindung zu zwei Bleien trotz seines schwachen Drehmoments im Allgemeinen bevorzugt. Die Hauptanwendung von CA -Bremsgräben der einzelnen Phasen ist die Kranhöhe.
(b) Selbsterreiche Bremsung mit Kondensatoren: Bei dieser Methode werden drei Kondensatoren ständig über die motorischen Terminals verbunden. Die Werte der Kondensatoren werden somit ausgewählt, als wenn sie von der Linie getrennt werden, arbeitet der Motor als selbstversorgter Induktionsgenerator.
Die Bremsanschluss ist in Abbildung 6.18 (a) dargestellt und der Selbstbekämpfungsprozess ist in Abbildung 6.18 (b) ohne Ladungsbedingung erläutert. Kurve A ist keine Maschinenmagnetisierungskurve der Maschine mit einer bestimmten Geschwindigkeit, und Linie B repräsentiert den Strom durch Kondensatoren, die von gegeben sind durch
![]()
wobei E der vom Stator durch Phase induzierte Stator ist.
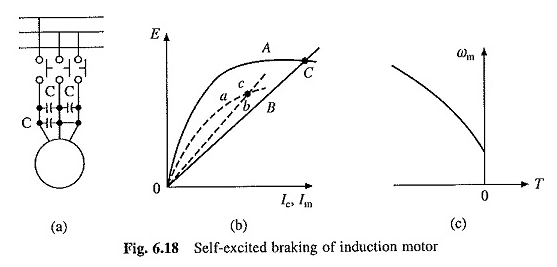
Kondensatoren liefern den reaktiven Strom, der für die Aufregung erforderlich ist. Der Betrieb erfolgt an Punkt C, dem Schnittpunkt zweier Merkmale. Wenn die Geschwindigkeit fällt, fällt der Wert von E für denselben Magnetisierungsstrom und das neue Merkmal der Magnetisierung A wird erhalten.
Andererseits nimmt die Steigung des charakteristischen E gegen IC zu, indem ein neues Merkmal B. der Schnittpunkt zweier Kurven nun auftritt. C. Somit nimmt die Geschwindigkeitsreduzierung während der Verschiebung der Magnetisierungskurven nach unten zu, die Steigung der Kondensatorspannung gegenüber der Stromkurve.
Bei einer bestimmten kritischen Geschwindigkeit, die im Allgemeinen hoch ist, treffen sich zwei Kurven nicht und die Maschine erregt sich nicht und das Bremsmoment fällt auf Null. Das Merkmal der selbst angeregten Bremsgeschwindigkeit ist in Abbildung 6.18 (c) dargestellt.
Manchmal sind externe Widerstände an den Statorklemmen angeschlossen, um das Bremsdrehmoment zu erhöhen und eine bestimmte Energie, die außerhalb des Geräts erzeugt wird, zu leiten. Die Konstruktion von Abbildung 6.18 (b) gilt nur für jede Gebühr.
Für eine genauere Analyse muss die Reduzierung der motorischen Impedanz berücksichtigt werden. Dieses Diagramm wird selten verwendet, da das Bremsdrehmoment bei einer Geschwindigkeit, die im Allgemeinen hoch ist, auf Null fällt.
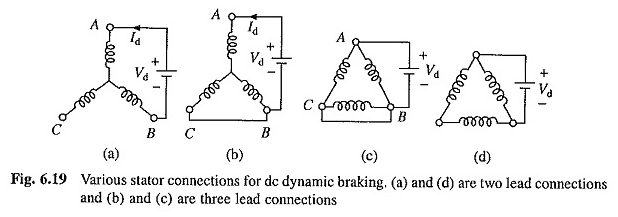
(C) Dynamischer Bremsbremse CC: Es wird erhalten, wenn der Stator eines Induktionsmotors, der mit einer Geschwindigkeit arbeitet, an eine direkte Stromversorgung angeschlossen ist. Zwei häufig verwendete Verbindungen, zwei und drei Blei für Stern- und Delta -Verbindungen, sind in Abbildung 6.19 dargestellt.
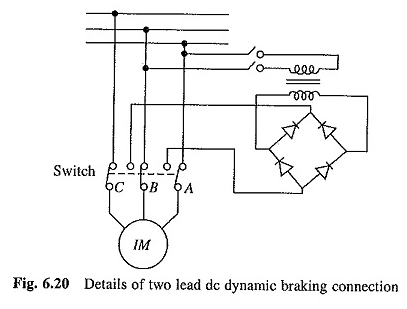
Eine Methode zum Erhalten der DC -Versorgung unter Verwendung einer Diodenbrücke für zwei Bleiverbindungen ist in Abbildung 6.20 dargestellt.
Der CC -Strom, der den Stator überquert, erzeugt ein stationäres Magnetfeld. Die Bewegung des Rotors in diesem Feld führt zu einer Spannung im Rotor des Rotors. Die Maschine arbeitet daher als Generator.
Die erzeugte Energie wird im Widerstand gegen den Rotorkreis abgeleitet, wodurch ein dynamisches Bremsbremsen des Induktionsmotors erzeugt wird.
Da das Feld stationär ist, beträgt die relative Geschwindigkeit zwischen Rotortreibern und dem Feld jetzt ωm. Die induzierte Spannungsfrequenz entspricht der Frequenz der Spannung der Quelle CA (oder der Frequenz des Nennmotors), wenn ωm = ωms.
Oder die im Rotor induzierte Spannung während des Rennens mit synchroner Geschwindigkeit. Wenn es mit einer Geschwindigkeit ωm arbeitet, wird die induzierte Spannung und ihre Frequenz ser bzw. SF sein. ALSO

Dies ergibt eine äquivalente Schaltung in der Phase von Abbildung 6.21 (a) für den Rotor. Die Aufteilung aller Größen nach S wird ein Schaltkreis erzeugen, der der Nominalfrequenz entspricht.
In Bezug auf verschiedene äquivalente Schaltungsparameter, die so aus den Statortürmen erhalten wurden, ergibt eine äquivalente Schaltung in der in Abbildung 6.21 (b) dargestellten Phase des Rotors. Die äquivalente Schaltung des Stators unter der dynamischen DC -Bremsung des Induktionsmotors ist in Abbildung 6.21 (c) dargestellt.
Um mit einem äquivalenten Rotorschaltung in Abbildung 6.21 (b) zu kombinieren, müssen wir zunächst eine äquivalente Schaltung durch Phase des Stators bei der Nennfrequenz erhalten. Die äquivalente Schaltung Abb. 6.21 (c) legen nahe, dass der Stator MMF konstant und unabhängig von der Geschwindigkeit ist.
Wir stellen uns daher vor, dass der Stator von einer dreiphasigen ausgewogenen Stromquelle der Nominalfrequenz angetrieben wird, was einen Phasenstrom ergibt. Der Strom CA entspricht der ID, vorausgesetzt, sie erzeugt Stator MMF mit der gleichen Amplitude wie die CC -Strom -ID.
Somit ersetzen wir ein stationäres MMF -Stator, das durch CC -Strom -ID erzeugt wird, durch ein MMF (erzeugt durch IS) mit identischer Amplitude, sich jedoch bei synchroner Geschwindigkeit dreht.
Die Differenz dieser beiden MMFs wird eine Luftverstärkungs-MMF sein, die für die Produktion von Luftverletzungen verantwortlich ist, die wiederum die Spannung der im Stator induzierten Nennfrequenz verursacht. Die äquivalente Schaltung in der Statorphase an der Nennfrequenz nimmt somit die dargestellte Form in Abbildung 6.21 (d) an.
Die Kombination von äquivalenten Schaltungen von Abb. 6.21 (6) und (d) und des Entzuges des Transformators ergibt eine nominale Frequenz durch Schaltkreis, die in der Phase entspricht (Abb. 6.21 (e)).

Es ist klein für kleine S, und daher bin ich Ansätze. Aufgrund eines hohen Wertes von Instant -Messaging ist der Magnetkreis gesättigt. Somit ist XM nicht konstant, variiert jedoch mit IM. Für eine genaue Analyse muss die Variation von XM mit IM berücksichtigt werden.
Die Beziehung zwischen IS und ID hängt von der Verbindung des Stators ab. Lassen Sie es uns beispielsweise für die beiden Bleiverbindungen in Abbildung 6.19 (a) abgeleitet. Hier ia = id und ib = – id.
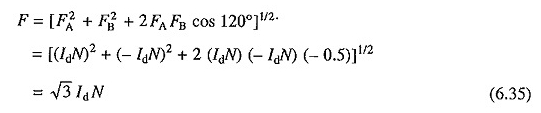
Wenn n in jeder Wicklung eine effektive Anzahl von Kurven ist, wird die durch die A-Phase erzeugte maximale MMF idn und der durch Phase B erzeugte maximale MMF (-IDN) sein. Angenommen, diese MMFs sind im Weltraum verteilt, wird das Ergebnis des resultierenden MMF sein
Wenn die Maschine von einer ausgewogenen Stromquelle von dreiphasigen angetrieben wird, ist der Stator MMF Peak

Ist gleichbedeutend mit ID, wenn f = f ‚. Daher aus Gleichungen. (6.35) und (6.36)
![]()
Die Werte von sind für andere Verbindungen (Abb. 6.19 (b), (c) bzw. (d)):
![]()
Das Merkmal der Torca -Geschwindigkeit wird wie folgt berechnet.
Aus dem äquivalenten Schaltkreis von Abbildung 6.21 (e)
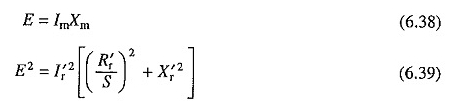
Betrachten Sie die Verteilung der Ströme zwischen den durch XM gebildeten parallelen Zweigen und dem Rotor

Subtraktion der Gleichung. (6.39) aus (6.40) Ausbeuten

Der Gleichung (6.39)

Das Motordrehmoment ist

Da XM von der IM, Gl. (6.38) – (6.42) sind nichtlineare algebraische Gleichungen. Die Verwendung der folgenden Schritte vermeidet die Notwendigkeit einer digitalen Lösung. Nehmen wir einen IM -Wert an, erhalten Sie E entsprechend der Magnetisierungsmerkmale und berechnen Sie XM aus der Gleichung.
(6.38), holen Sie den R von (6.41), berechnen Sie S aus (6.42), dann ωm und T aus den Gleichungen. (6.34) bzw. (6.43).
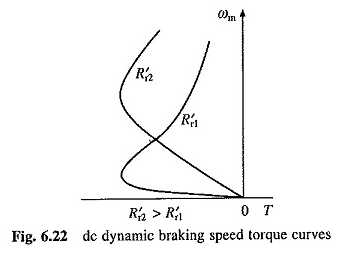
Abbildung 6.22 zeigt die Art der Geschwindigkeitsdrehmomentkurven für zwei Rotorwiderstandswerte. In einem Eichhörnchen -Käfigmotor oder einem Wundholz -Rotormotor ohne externen Widerstand im Rotor tritt das maximale Drehmoment bei niedriger Geschwindigkeit auf.
Während das maximale Drehmoment unabhängig vom Rotorwiderstand ist, steigt die Geschwindigkeit, bei der das maximale Drehmoment auftritt, mit dem Widerstand gegen den Rotor. Wenn Abb.
6.22 DC Dynamisches Bremsbremsen von Induktionsmotor -Geschwindigkeitspaarkurven Schnelles Bremsen ist erforderlich, sensibler Widerstand ist in der Rotorschaltung angeschlossen und wird im Abfall der Geschwindigkeit geschnitten.
Bei der Aufrechterhaltung einer aktiven Belastung wie bei Minenwicklern wird ein hoher Widerstand angeschlossen, um Beschleunigungskurven mit einer negativen Steigung zu erhalten, um die Stabilität im Gleichgewichtszustand zu gewährleisten.
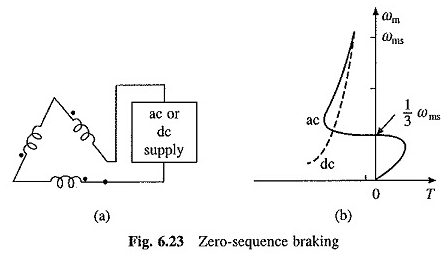
. Eine solche Verbindung wird als Null-Sequenz-Verbindung bezeichnet, da die Ströme in allen Highlights des Stators koplattform sind.
Das durch Co-Land-Ströme (oder keine Nullsequenz) verursachte MMF erzeugt ein Magnetfeld dreimal so viele Pole, für die die Maschine wirklich aufgerollt ist. Mit einer Wechselstromversorgung ist das resultierende Feld im Weltraum stationär und geht zur Häufigkeit der Stromversorgung.
Mit der DCE -Stromversorgung ist das resultierende Feld im Weltraum stationär und von konstanter Größe. Ein wichtiger Vorteil dieser Verbindung ist die gleichmäßige Belastung aller Statorphasen. Die Art der Geschwindigkeitsgeschwindigkeitskurven für Wechselstrom- und CC -Netzteil ist in Abbildung 6.23 (b) dargestellt.
Mit wechselnden Strom kann das Bremsen nur bis zu einem Drittel der synchronen Geschwindigkeit verwendet werden. Bremsungspaare, die durch diese Verbindung hergestellt werden, sind jedoch erheblich größer als das Automobil. Der Motor arbeitet hauptsächlich bei regenerativem Bremsen.
Bei niedrigem Widerstandsmotoren zum Rotor wird ein wichtiger Teil der erzeugten Energie gewonnen. Im Gegensatz zur dynamischen Wechselstrombremsung des Induktionsmotors erfordert es keinen hohen Rotorwiderstand und kann daher beides verwendet werden – mit Eichhörnchenmotoren und Rotonmotoren.
Mit der Stromversorgung ist das Bremsen im gesamten Geschwindigkeitsbereich erhältlich. Es ist im Wesentlichen dynamisches Bremsen, da die gesamte erzeugte Energie in Rotorwiderstand verschwendet wird.
Die Schaltanordnung von dreiphasigen Betrieb bis zu Normal Null ist extrem einfach, wenn der Motor über einen Delta -angeschlossenen Stator verfügt.