Eigenschaften der dreiphasigen Induktionsmotor:
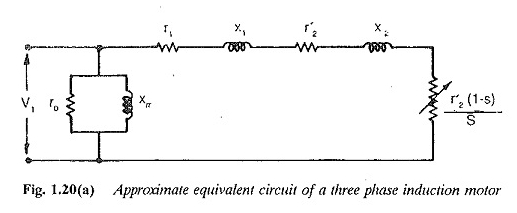
Die Leistungsmerkmale der dreiphasigen Induktionsmotor können unter Verwendung der in Abbildung 1.20 (a) dargestellten ungefähren Äquivalentschaltung abgeleitet werden. In der Schaltung

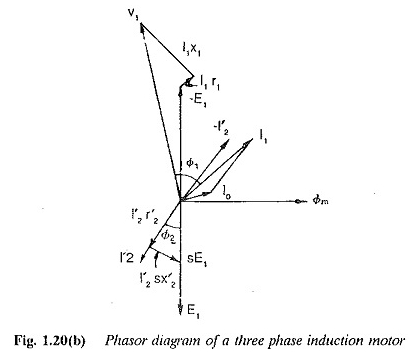
Das Motorphasendiagramm ist in Abbildung 1.20 (b) dargestellt.
In einem Induktionsmotor liegt der in den Rotor (PD) übertragene Strom, der Kupferverlust des Rotors (PCU2) und die entwickelte mechanische Leistung (PM) in einem Verhältnis von 1: S: (1 – S). Das vom Motor entwickelte Drehmoment

Aber mit PM -Beziehungen = PD (LS) und NR = NS (LS) haben wir
![]()
Mehr in der Tiefe Verwendung 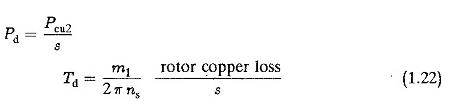
Der äquivalenten Schaltung

Das entwickelte Paar ist daher

Sehr kleine Slips (Motorbetriebsregion)
und r’2 / s≫r1 führt zu

Dies zeigt, dass das entwickelte Drehmoment direkt proportional zur Verschiebung ist. Auf die gleiche Weise variiert das Paar mit signifikanten Verschiebungen im Verhältnis zu der Verschiebung. In den Zwischenverschiebungen muss das entwickelte Paar berechnet werden. Das Merkmal des Geschwindigkeitsmoments (Gleiten) ist in Abbildung 1.21 dargestellt.
Aus dem charakteristischen Trend können wir erkennen, dass das Drehmoment einen Höchstwert gibt. Die Verschiebung, bei der dieses maximale Drehmoment durchgeführt wird

Das maximale Drehmoment ist

Manchmal wird die Impedanz des Stators vernachlässigt oder der Statorimpedanz ist ausgefallen, um den Motor mit einem konstanten Strömung zu allen Objektträgern zu betreiben. Die angelegte Spannung wird so erhöht, dass die induzierte Spannung. E1 / F ist konstant (gleich dem Wert bei der Nennspannung).
Die angelegte Spannung variiert je nach Frequenz wie E1 / F bleibt konstant. Die Impedanz des Stators kann als Null angenommen werden, da er keine Wirkung hat. In einem solchen Fall sind Beziehungen


„Die Schlüsselgeschwindigkeitskurve für diesen Fall ist auch in Abbildung 1.21 dargestellt.
Beachten Sie die folgenden Eigenschaften einer typischen Geschwindigkeitsgeschwindigkeitskurve (Abb. 1.21):
- Bei genau synchroner Geschwindigkeit S = 0 ist das entwickelte Drehmoment Null (TD = 0). Dies ist zu erwarten, da es aufgrund der relativen Geschwindigkeit keine induzierten Ströme gibt.
- Das vollständige Ladungspaar entspricht der nominalen Verschiebung.
- TDM ist das maximale Drehmoment am Slip SM (t)
- TST ist das Startdrehmoment bei s = 1.
Das mit einer maximalen Drehmomentfraktion ausgedrückte Schiebetpaar wird gegeben

wobei a = r1 / r’2. Wenn der Widerstand des Stators R1 vernachlässigt wird

Der Betrieb des Motors im Schiebebereich 0 – SM ist stabil. Wenn der Motor in diesem Strand arbeitet, wird jede Störung am Betriebspunkt durch Änderung der Geschwindigkeit oder des Drehmoments amortisiert und der Motor kehrt zu seinem ursprünglichen Betriebspunkt zurück oder erreicht eine neue. Für den stabilen Betrieb muss das entwickelte Drehmoment zunehmen, wenn die Geschwindigkeit sinkt, dh dh, heißt es:
Der Betrieb des Motors in SM Beach. zu / ist instabil. In diesem Strand hat die Kurve eine positive DTD / DNS, dh das Drehmoment nimmt ab, wenn die Geschwindigkeit sinkt.
Das Merkmal ist fast linear mit sehr kleinen Objektträgern (im stabilen Betriebsbereich). Diese Linearität setzt sich bis zum Bruchdrehmoment für den Betriebsfall mit einem konstanten Fluss fort. Die dargestellten Eigenschaften in Abbildung 1.21 sind in derselben Abbildung neu gestaltet.
Für die Einheit -up -Verschiebungen befindet sich der Betrieb im vierten Quadranten. Die Drehung des Rotors und des Drehmagnetfeldes befindet sich in einer entgegengesetzten Richtung. Das entwickelte Drehmoment ist ein Bremsmoment, der versucht, den Motor zu stoppen. Dies kann auf zwei Arten passieren:
- Die Phasensequenz der Motorversorgung wird während ihres Rennens umgekehrt.
- Das negative Drehmoment wird auf den Baum angewendet.
Der Motor wirkt wie eine Bremse im Schiebebereich (s> 1), damit die Last bei konstanter Geschwindigkeit beim Absenken der Last steigt. Das Paar ist positiv, während die Richtung der Rotation umgekehrt ist.
Durch einen geeigneten Widerstand des Rotors wird der Betriebspunkt auf den operativen Quadranten verschoben, sodass die Last bei konstanter Geschwindigkeit gesenkt wird.
Die Drehmomentgeschwindigkeitskurve erstreckt sich bis zum zweiten Quadranten und repräsentiert ein negatives Drehmoment in der Richtung vor der Drehung. Dies geschieht, wenn die Geschwindigkeit von

Der Rotor ist höher als die Synchrongeschwindigkeit. Jeder Rotor -Trend, der über die Synchrongeschwindigkeit hinaus beschleunigt wird, wird durch ein Drehmoment für Generationen gestoppt. In diesem Betriebsmodus wird die gesamte kinetische Energie, die mit der Erhöhung der Geschwindigkeit verbunden ist, an den Sektor zurückgegeben. Das maximale Drehmoment (Zersetzung) hängt von Folgendes ab:
- Es variiert wie das Quadrat der angelegten Spannung.
- Es nimmt mit der Impedanz des Stators ab.
- Sein Wert ist unabhängig vom Rotorwiderstand.
- Sein Wert nimmt mit einer Zunahme der Reaktanz von Rotorlecks ab.