Einzel -Phasen -Induktion -Motor:
Eine einzelne Phaseninduktionsmotor enthält eine einzelne Phase verteilte Wickelung am Stator und den normalen Eichhörnchenrotor, wie in Abbildung 10.1 schematisch dargestellt, in der die Statorwicklung aus einer Bequemlichkeit in konzentrierter Form dargestellt wird.

Es gibt zwei wichtige Methoden zur Analyse dieser Motor, nämlich
- Theorie des Transversalfeldes und
- Theorie der rotierenden Felder.
Da letzteres eher der Theorie der dreiphasigen Induktionsmaschine ist, wird sie hier übernommen.
Pulsierender Feld wie zwei rotierende Felder:
Abbildung 10.1 ergibt das schematische Schema eines Einphaseninduktionsmotors mit einer Statorwicklung und einem Rotor des Eichhörnchen-Cage. Die Wicklung ist im Weltraum verteilt, so dass der grundlegende Raum von MMF die dominanteste Komponente der realen MMF -Verteilung ist.
Die räumlichen Harmonischen von MMF würden wie bei einem Induktionsmotor in drei Phasen dann ignoriert. Wenn die Wicklung einen sinusförmigen Strom trägt, erzeugt sie einen MMF, der an den sinusäuschen Raum verteilt ist, dessen Pulssen -Spitzenwert im Laufe der Zeit. Wie die Wickelachse zeigt, ist die MMF in jedem Winkel θ
![]()
wobei θ der Winkel ist, der aus der Wickelachse gemessen wird. JETZT
![]()
so dass der MMF sowohl eine Verteilung von Raum als auch Zeit hat
![]()
Diese Gleichung kann trigonometrisch in der Form manipuliert werden

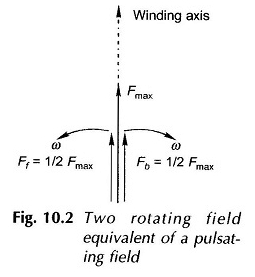
Die Gleichung (10.4) zeigt uns, dass ein gepulste ein -Phasen -Feld als Überlagerung von zwei Rotationsfeldern angesehen werden kann, die mit einer synchronen Geschwindigkeit (ω = 2πf gewählt werden. RAD / s) in entgegengesetzte Richtungen:

Diese beiden Felder weisen eine Amplitude auf (1/2) fmax, wobei Fmax der Maximalwert des MMF -Pulsatoriums entlang der Achse der Wicklung ist. Die Aufteilung eines einzelnen gepulsten Feldes in zwei in entgegengesetzten Richtungen laufenden Rotationsfeldern ist in Abbildung 10.2 dargestellt.
Diese Abbildung zeigt die Position der Rotationsfelder zu einer Zeit, in der die MMF entlang der Wickelachse + Fmax ist.
Rotorgleiten im Vergleich zu zwei rotierenden Feldern:

Für den in Abbildung 10.1 dargestellten eindeutigen Fall zeigt Abbildung 10.3 die Rotationsfelder nach vorne und hinten mit dem Rotor, der mit Geschwindigkeit N in Richtung des Vorderfelds läuft. Die Verschiebung des Rotors in Bezug auf das Drehfeld vorwärts ff ist dann

Während der Rotor in Bezug auf das Dreh -Back -Feld FB gleitet

Somit sind die Rotorrutschen im Vergleich zu den beiden Drehfeldern unterschiedlich und sind durch die Gleichungen (10,5a) und (10,5B) gegeben.
Charakteristisch für die Geschwindigkeit des Motors des Ein -Phasen -Induktionsmotors:
Die qualitative Behandlung in einem Zustand des stationären Rotors (n = 0, dh S = 1), gleiten die beiden Rotationsfelder mit derselben Verschiebung, S = 1, (siehe Gleichung (10,5a) und (10,5B)) gleiche Strömungen im Rotor des Eichhörnchens.
Die beiden Rotationsfelder haben den gleichen Widerstand und erzeugen gleiche und entgegengesetzte Paare, was zu einem Netto -Startdrehmoment von Nullwert führt. Der Einzel-Vakuum-einphasige Induktionsmotor ist daher ein nicht properstart.
Darüber hinaus induzieren die beiden Rotationsfelder eine EMF, die zum Stator führt, der die angelegte Spannung ausbalanciert, indem die Statorwicklung eine geringe Leckungsimpedanz annimmt.
Wenn der Rotor jedoch so ausgelegt ist, dass er mit Geschwindigkeit n in Richtung des Vorderfelds betrieben wird, sind die beiden Schichten nun s und (2 – s).
Für den normalen Betrieb (2 – s) ≫ s und daher sind die durch den Hintergrund induzierten Rotorströme viel höher als bei Stopp und haben einen niedrigeren Leistungsfaktor.
Der entsprechende gegnerische Rotor -MMF führt in Gegenwart der Statorimpedanz zu einer erheblichen Verringerung des Feldes nach hinten. Andererseits induziert das Rotationsfeld in Richtung der niedrigen Verschiebung kleinere Ströme eines höheren Leistungsfaktors im Rotor als beim Stoppen.
Dies führt zu einer großen Verbesserung der vorderen Flusswelle.
Diese Reduzierung vom Feld nach hinten und die Verstärkung des Vorderfeldes hängen von der Verschiebung ab und die Differenz steigt, wenn sich die Schleims (im Vergleich zum Vorderfeld) reduziert oder die Geschwindigkeit des Rotors in die vordere Richtung nahe an der Synchrongeschwindigkeit liegt.
Tatsächlich kann das Vorderfeld nahezu synchroner Geschwindigkeit mehrmals das Feld sein. Infolgedessen gibt es ein Netto -Paar. Die beiden Felder müssen immer die EMK -Wicklung des Stators induzieren, um die angelegte Spannung auszugleichen.
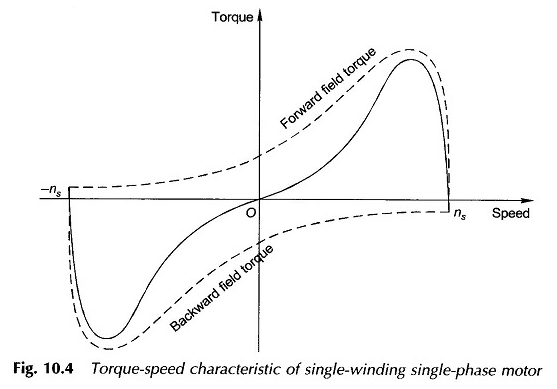
Das vollständige Merkmal der Drehmomentgeschwindigkeit als Summe der beiden Drehmomentgeschwindigkeitseigenschaften (vorne und hinten) ist in Abbildung 10.4 gezeichnet.
Das Ergebnis der Schwächung eines Feldes und der gleichzeitigen Verstärkung des anderen führt zu einer Merkmale der Drehmomentgeschwindigkeit wie der eines Dreiphasen -Induktionsmotors im Geschwindigkeitsbereich nahe der Synchron. Die Tatsache des Null -Start -up -Drehmoments wird hier sofort beobachtet.
Das vordere Feld und das Reaktionsfeld in der Rückseite des Rotors sowie der Hintergrund nach hinten und das vordere Reaktionsfeld des Rotors bewegen sich in entgegengesetzte Richtungen, wobei relative Geschwindigkeiten von 2N ein zweites harmonisches gepulstes Drehmoment mit einem Durchschnittswert von Null erzeugen.
Infolgedessen ist ein einzelner Phaseninduktionsmotor ein lautstärkerer Motor als ein 3 -Phasen -Motor, der kein solches pulsierendes Drehmoment aufweist. Das pulsierende Drehmoment ist in der Tat eine direkte Folge der pulsierenden Leistung in einer einzelnen Phasenschaltung.
Tatsächlich repräsentiert die Drehmomentreihenfolge im Charakter der Drehmomentgeschwindigkeit eines einzelnen Phaseninduktionsmotors das durchschnittliche Drehmoment.
Halbquantitative Analyse:
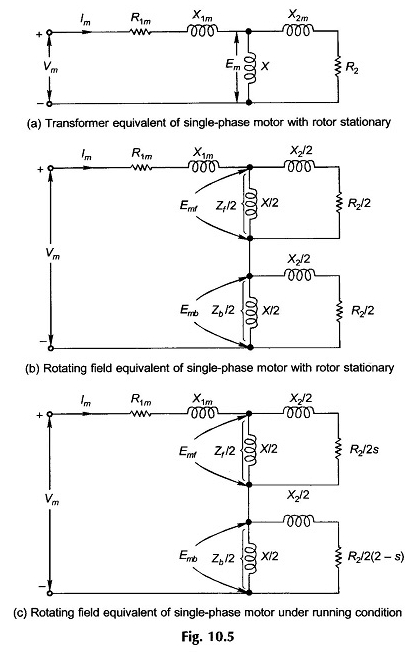
Um das Schaltungsmodell einer einzelnen Einzelvakuum-Engine semiquantitativ zu entwickeln, werden heuristische Argumente verwendet. Der Motor mit einem stationären Rotor wirkt einfach als Transformator mit einem Schaltungsmodell, wie in Abb. 1 gezeigt.
10.5 (a), der Zweig von Core-Dédoute wurde ignoriert. Das Suffix M im Stator bezieht sich auf die Hauptwicklung und EM ist die EMF, die durch das vom alternativen Feld konfigurierte Stator induziert.
Der Motor ist nun aus der Sicht der Theorie des Rotationsfeldes zu sehen. Die resultierende induzierte EMF besteht aus zwei gleichen Komponenten, die durch die beiden gegenüberliegenden Rotationsfelder desselben Widerstands induziert werden, dh
![]()
Die Magnetisierungs- und Rotorimpedanzen sind in zwei gleiche Hälften unterteilt, die in Reihe verbunden sind, wie in Abbildung 10.5 (b) gezeigt; Der Motor verhält sich als zwei Motoren, die in Serie A, die jedem Drehfeld entspricht, angeschlossen.
Die Schaltungen der beiden Komponentenmotoren sind identisch mit dem stationären Zustand, da der Rotor im Vergleich zu jedem Drehfeld die gleiche Verschiebung aufweist.
Wenn der Rotor mit Geschwindigkeit n im Vergleich zum Vorderfeld arbeitet, ist die Verschiebung im Vergleich zu ihm und (2 s) im Vergleich zum Drehfeld nach hinten, so dass das Schaltungsmodell nun wie in Abbildung 10.5 (c) ändert.
Aus dieser Abbildung können wir leicht erkennen, dass ZF / 2 ≫ Zb / 2 und daher EMF ≫ EMB, dh das Vorderfeld -Feldmotoreneffekt, überwiegt und ein Paar erzeugt.
Das praktische Bedürfnis schreibt vor, dass die beiden Rotationsfelder unter stationären Bedingungen eine ungleichmäßige Stärke haben, die sich selbst starten.
Dies erfordert eine weitere Wicklung des Motors, die als Oxiliary -Wicklung bezeichnet wird und sich in räumlicher Quadratur mit der Hauptwicklung befindet und eine geringere Anzahl von dünneren Kurven umfasst.
Diese Wicklung kann von der Schaltung abgeschnitten werden, sobald der Motor begonnen hat, außer im Fall des Motors, der vom Kondensator verwaltet wird, bei dem er mit dem Verbesserungsdienst für den Gesamtleistungspfaktor verbunden werden kann.
Leistungsanalyse:
Die Leistung eines einzelnen Phaseninduktionsmotors kann durch Analyse des in Abbildung 10.5 (c) angegebenen Motorschaltungsmodells erhalten werden, wie es für einen Induktionsmotor in drei Phasen durchgeführt wurde.
Die Ergebnisse ähneln denen eines Induktionsmotors in drei Phasen, da das Schaltungsmodell im Wesentlichen gleich ist.
Luftspiegelmächte für die vorderen und hinteren Felder sind von gegeben

Wobei IM der Hauptwickelstrom und RF und RB sind, sind die tatsächlichen Teile der Impedanzen der komplexen Zahl z̅F bzw. Z̅B in Abbildung 10.5 (c).
Von beiden Feldern produzierte Paare können ausgedrückt werden als

wobei ωs = Synchrongeschwindigkeit in rad / s.
Da die beiden Felder in entgegengesetzte Richtungen verlaufen, sind das von den beiden erzeugte Paar. Das resultierende Paar entwickelt ist daher

Rotorkupferverluste entsprechen im Allgemeinen den Gleitzeiten der Luftkraft. Also

Die in eine grobe mechanische Form umgewandelte elektrische Leistung ist

Gleichung (10.11) kann auch als geschrieben werden

Dies impliziert, dass der Eingang der elektrischen Versorgung zum Motor, der den Kupferverlust des Stators vernachlässigt
![]()