Elektrische frei von Polyphase -Induktionsmotoren:
Elektrische Bremsung von Polyphase -Induktionsmotoren, die aus verschiedenen Typen besteht, nämlich,
- Verzweigung (oder Gegenstrombremsung)
- Dynamisches (oder rheostatisches) Bremsen
- Regeneratives Bremsen
1. Verzweigung (oder Bremsen gegen die Flut)
Der Stecker kann in einem Induktionsmotor einfach durch Umkehrung von zwei der drei Phasen hergestellt werden, wodurch die Richtung des Rotationsmagnetfelds verursacht wird.
Wenn der Motor in die Steckerposition wechselt, arbeitet der Motor in der gegenüberliegenden Richtung des Feldes und die relative Geschwindigkeit beträgt ungefähr zweimal [(2 – s) mal] der synchronen Geschwindigkeit, dh die Verschiebung ist sehr nahezu zwei und ist gleich (2 – s).
Die im Rotor induzierte Spannung wird daher doppelt so doppelt in die Spannung induziert, und die Wicklung muss mit zusätzlicher Isolierung geliefert werden, um dieser großen Spannung standzuhalten.
Während der Verbindungszeit fungiert der Motor als Bremse und absorbiert die kinetische Energie der immer rotierenden Last, wodurch der Abfall seiner Geschwindigkeit führt. Die zugehörige PMECH -Leistung wird in Form von Wärme im Motor abgeleitet.
Gleichzeitig zieht der Rotor auch weiterhin die Leistung des Stators, der auch in Form von Wärme abgelöst wird. Aufgrund der Zunahme der Rotorfrequenz gibt es zusätzliche Eisenverluste im Rotor.
Somit beträgt die im Rotor während der Bremszeiten entwickelte Wärme etwa dreifache Wärme, die während der Startperiode (oder in einem blockierten Rotorzustand) entwickelt wurde.
Die Größe des Induktionsmotors, bei dem der Stecker angewendet werden muss, wird daher nicht durch das Laden der Bedingungen allein, sondern auch durch Bremszustand entschieden.
Im Falle eines Eichhörnchen -Käfigmotors wird die Energie vollständig in der Maschine abgelöst. Während im Falle eines Wundrotormotors diese Energie auch im externen Widerstand in den Rotorschaltungskreis zu diesem Zweck abgeleitet wird.
Die elektrischen Bremsbedingungen von Polyphase -Induktionsmotoren können untersucht werden, indem die Motorroutskurven des Motors berücksichtigt werden, wenn sie über den Punkt von 100%hinaus erweitert werden, wie in Abbildung 1.103 (a) gezeigt.
Die Ordinate in Punkt B repräsentiert das Drehmoment zum Zeitpunkt des Steckers und wir können sehen, dass das Drehmoment allmählich zunimmt, wenn sich der Motor dem Stopp nähert. Danach wird es natürlich, wenn die Stromleitung nicht getrennt wird, wieder in die entgegengesetzte Richtung nach der gewöhnlichen Geschwindigkeit der Drehmomentkurven von A bis O.
Wir sehen daher, dass es wichtig ist, den Motor mit einer Nullgeschwindigkeit zu trennen, um den Motor zurückzubringen.

Aus den in Abbildung 1.103 (a) gezeigten Drehmomentschiebkurven wird beobachtet, dass das Ausmaß des Bremsdrehmoments im Vergleich zum vom Motor ausgeübten maximalen Drehmoment sehr niedrig ist. Dies gilt insbesondere für den niedrigen Widerstand des Rotors.
Da immer mehr Widerstand in den Rotorkreis eingefügt wird, tritt ein maximales Drehmoment bei Zunehmungswerten auf.
Dies ist der Grund, warum die Induktionsmotoren des Eichhörnchenkäfigs, die hauptsächlich für maximale Effizienz ausgelegt sind und daher für einen solchen Bremsart nicht für einen solchen Widerstand geeignet sind.
Im Falle von Rotortreibern der Wunden führt die Zugabe von Widerstand in der Rotorschaltung immer mehr Bremsmoment und daher sind die Treiber des Rotors der Wunden besser für den Stecker geeignet.
Wenn die Änderung des Rotorwiderstands eingestellt wird, um einzustellen

Der Ausdruck des Bremsmoments, der die Impedanz des Stators und die Magnetisierungsreaktanz vernachlässigt, kann abgeleitet werden und wird als gegeben

Der Rotorstrom kann während der Bremszeit aus der folgenden Beziehung bestimmt werden und wird verfolgt, wie in Abbildung 1.103 (b) gezeigt.

Oder
- E2 ist die EMF in jeder Phase des Rotors an einem Stopp,
- R2 ist der Widerstand gegen Rotor nach Phase und
- X2 ist die Reaktanz des Rotorstopps pro Phase und
- S ist die Verschiebung.
Während der Glückseligkeitszeit, da die EMF in den Rotor induziert, ist der Strom des Rotors und der Strom des Stators daher sehr hoch. Der Bremsstrom kann jedoch reduziert werden, indem ein externer Widerstand in den Rotorkreis eingefügt wird.
Auch ab diesem Zeitpunkt sind die Treiber des Rotors der Wunden im Vergleich zu den Motoren des Rotors des Eichhörnchenkäfigs von Vorteil.
Die Käfigmotoren eines Auslasss von etwa 20 kW sind direkt angeschlossen und verwenden die Sternverbindung, wenn ein Stern-Delta-Schalter bereitgestellt wird. Größere Motoren benötigen einen Statorwiderstand. Wundrotormotoren verwenden Rotorwiderstände für die Begrenzung des Stroms sowie die Entwicklung höherer Bremspaare.
Bei häufigen Bremsrechten können thermische Bewertungsprobleme auftreten, wie oben bereits erläutert, und Schütze benötigen möglicherweise häufige Wartung.
Die gleichzeitige Umkehrung der Statorverbindungen und die Einbeziehung des Rotorwiderstands in die Wurzelmotoren der Wunden sind durchaus möglich, aber der gleiche Effekt kann durch Einbeziehung von Satuatoren in die Rotorwicklungen erzielt werden.
Alternativ kann ein Tiefenstangen -Rotorkäfig nach dem Betrieb des Steckers einen Anstieg des effektiven Widerstands des Rotors ergeben, da die Gleitfrequenz plötzlich von SF zu (2 – S) f erhöht wird, wobei f die Versorgungsfrequenz ist.
In der Praxis wird der Stecker vorteilhafterweise verwendet, um die Scheiben, bei denen das Bremsen und das Starten der Induktionsmotor in die entgegengesetzte Richtung umgekehrt ist, um die Schritte desselben kontinuierlichen Prozesses zu starten.
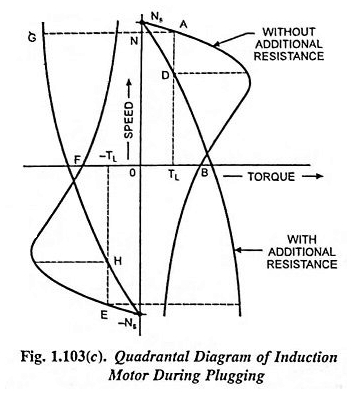
Der Steckerbetrieb kann auch unter Verwendung eines Quadrant -Diagramms erläutert werden, das in Abbildung 1.103 (c) gezeigt ist. Die Eigenschaften des in Abbildung 1.103 (c) gezeigten Geschwindigkeitsabwärts sind tatsächlich eine Erweiterung der Eigenschaften des Motors im zweiten und des vierten Quadranten. Die Erklärung von Abbildung 1.103 (c) ist genau identisch mit einer für Abbildung 1.94 (a) oder 1.94 (b).
2. Dynamisches (oder rheostatisches) Bremsen
Bei dieser elektrischen Bremsung von Polyphase -Induktionsmotoren kann rheostatische Bremsung erhalten werden, indem die Wicklung des Wechselstromstators getrennt und eine CC -Quelle zur Herstellung eines stationären Gleichstromfelds anregt.
Bei rheostatischer Bremsung wird die Statorwicklung als DC -Feldwicklung und die Rotorwicklung als Wicklung des Rahmens verwendet. Mit einer Wundrotormaschine können externe Widerstände in den Rotorschaltungskreis eingeführt werden, um eine Last bereitzustellen. Bei Eichhörnchen -Käfigmaschinen muss der Rotor des Rotors selbst die Last bilden.
Die Erregungquelle kann entweder durch eine unabhängige CC -Quelle oder vom Wechselstromsektor über einen Satz von Transformatorgleichrichter bereitgestellt werden, wie in Abbildung 1.105 gezeigt.
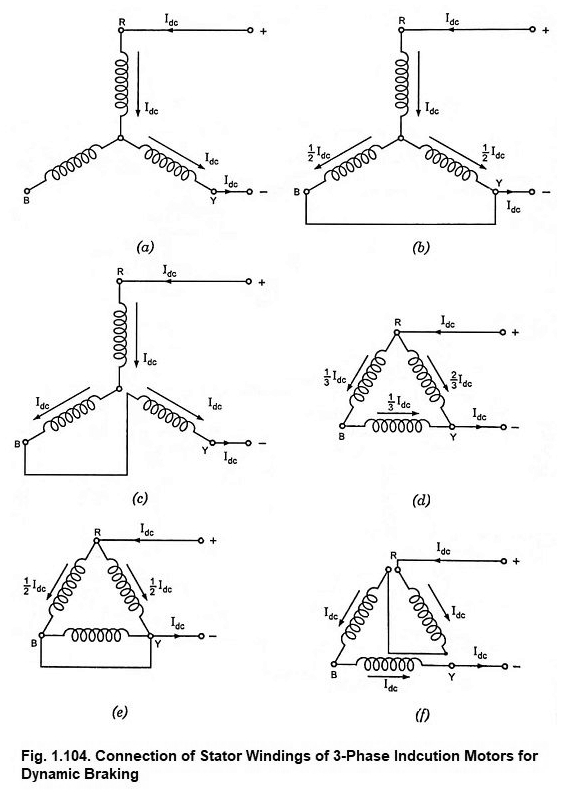
Verschiedene Methoden zur Verbindung des Stators mit einer CC -Quelle sind in Abbildung 1.104 dargestellt. Obwohl die in Abb. 1.104 (c) und 1.104 (f) gezeigten Verbindungen einen gleichmäßigen Strom der drei Phasen ergeben, sind jedoch im Schaltbetrieb kompliziert.
In dieser Hinsicht einfacher, die in Abb. 1.104 gezeigten Verbindungen. (a) und (b) werden im Allgemeinen verwendet.

Ein typisches Verbindungsdiagramm ist in Abbildung 1.105 angegeben; Die Maschine arbeitet wie ein Motor mit den geschlossenen Schützen, während mit offenem und B geschlossen wird, wird ein Gleichstrom von zwei Statorphasen geliefert, wobei der dritte im offenen Stromkreis belassen wird.
Der Widerstand R ‚wird in die Statorschaltung eingeführt, um seinen Strom zu begrenzen. Im Falle von Wundrotormotoren wird ein zusätzlicher Widerstand in die Rotorschaltung eingeführt, um den Bremswirkung zu steuern.
Während die Maschine normalerweise in Form eines Motors arbeitet, läuft ihr Magnetfeldstator mit einer synchronen Geschwindigkeit in die gleiche Richtung wie der des Rotors, aber etwas schneller als die Rotorleiter.
Wenn die Statorwicklungen von der Wechselstromkraft getrennt und mit DC angeregt werden, ist das erzeugte Magnetfeld im Raum bewegungslos, wodurch Rotorleiter das Feld mit einer Geschwindigkeit (1 – S) NS oder SNS überschreiten.
Die in Rotortreiber induzierten Ströme werden in Richtung des Automobilbetriebs entgegengesetzt, wodurch ein Bremsmoment erzeugt wird.
Obwohl der Luftverletzungsfluss stationär ist, gibt es die gleiche Anzahl von Polen, wie wenn die Maschine mit Wechselstrom angeregt wird und die Rotorströme daher eine Frequenz aufweisen, die nahe an der Frequenz liegt, die der synchronen Geschwindigkeit (dh ns) anfänglich entspricht, aber mit der Geschwindigkeit des Rotors abnimmt und Null bis zum Standfreien wird, und der Häufigkeit von Rotoren, die Frequenz der Rotoren, die Rotoren entspricht.
In ähnlicher Weise nimmt die im Rotor induzierte EMF um ein Maximum ab, wenn der Rotor ausgeführt wird, bei Null bis zum Stopp.
Mit anderen Worten, die im Rotor induzierte EMF wird durch SE2 gegeben, wobei E2 die Amplitude der im Rotor induzierten EMF ist, wenn es mit NS -Geschwindigkeit vor dem Feld läuft.
Es ist daher zu erkennen, dass die Rotorbedingungen während des rheostatischen DC -Bremsens mit der Geschwindigkeit, die von der Synchron zum Stoppen fällt, nahezu gleich ist, wenn sich der Motor normal beschleunigt.
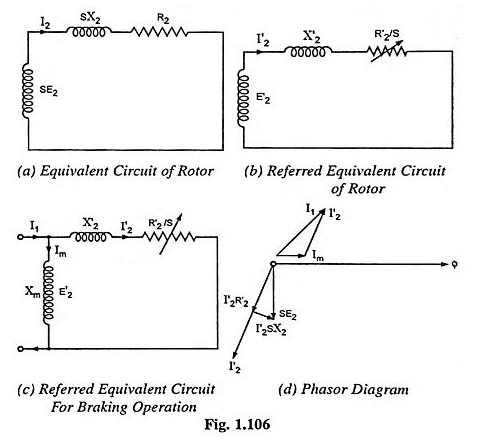
Infolgedessen kann der äquivalente Schaltkreis des Rotors wie in Abbildung 1.106 (a) angegeben dargestellt werden. Durch Teilen der Spannung und der Impedanz durch S haben wir die dargestellte Schaltung in Abbildung 1.106 (b) mit demselben Strom I2.
Da die Statorwicklung nur einen Gleichstrom transportiert, hat die Induktivität des Stators im Rahmen des Betriebs im permanenten Regime keine Auswirkungen. Die durch die Statorwicklung aufgetragene CC -Spannung wird nur durch Widerstand gegen die Statorwicklung festgelegt. Es wird keinen Eisenverlust im Statorkern geben.
Aber der Verlust des Kerns des Rotors wird von erheblicher Größe sein, und daher muss der Widerstandswert für den Rotor zum Stator zurückgeführt werden, der das während des Brems entwickelte Paar enthält, um ihn zu berücksichtigen. Die EMF induziert in den Rotor, bei der die Synchronitätsgeschwindigkeit, bei der die Magnetisierung die Magnnetisierung durchläuft, durch die Magneten der Magnetization, die die Magnnetisierung durch die Magnnetization erfolgt.
Die dargestellte Schaltung in Abbildung 1.106 (b) kann in einer dargelegten Schaltung in Abbildung 1.106 (c) modifiziert werden. Das Phasendiagramm, das dieser modifizierten Schaltung entspricht, ist in Abbildung 1.106 (d) dargestellt.
Es kann angemerkt werden, dass der Rotorstrom wechselt, wie er durch einen konstanten Strömung erzeugt wird, der durch ein magnetisierendes MMF -IMN1 verursacht wird, das im Weltraum stationär bleibt.
Wenn sie jedoch aus dem Rotor aus gesehen werden, scheint der MMF -Magneter und der resultierende Strömung im Stator abwechselnd zu sein.
Da der Rotor-Ampère-Kontrationen i2n2 (= i’2n1) von den Tatoren des Statorverstärkers ausgeglichen werden muss, um die IMN1-Magnetisierungswerke aufrechtzuerhalten, repräsentiert die Türme des Stators I1N1 als Rotor die phasoröse Summe von IMN1 und I’2n1.
Der aktuelle Wechselstrom I1 hängt von der Amplitude des vom Stator transportierten Gleichstroms und der Art der oben erläuterten Statorwicklungsverbindungen ab.
Aus der obigen Diskussion kann der Schluss gezogen werden, dass der Betrieb des Motors während rheostatischer DC -Bremsung unter Verwendung der äquivalenten Schaltung (deren Art, von der wir bereits vertraut sind) in Abbildung 1.106 (c) analysiert werden kann.
Das Bremsdrehmoment kann aus der Beziehung bestimmt werden
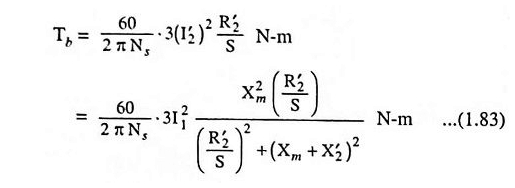
Die obige Gleichung ermöglicht es uns, das Bremsdrehmoment bei jeder Geschwindigkeit eines bestimmten Induktionsmotors zu bestimmen, wenn es durch einen Gleichstrom angeregt wird, I1, der einem äquivalenten Wechselstrom entspricht, der dieselbe MMF erzeugt hätte wie der durch den von den Statorwicklungen transportierten realen Gleichstrom.
Differenzierung der Gleichung. (1.83) WRT S und maximal auf Null aufzunehmen, wir haben eine Verschiebung, die dem maximalen Bremsdrehmoment entspricht

und maximales Paar,

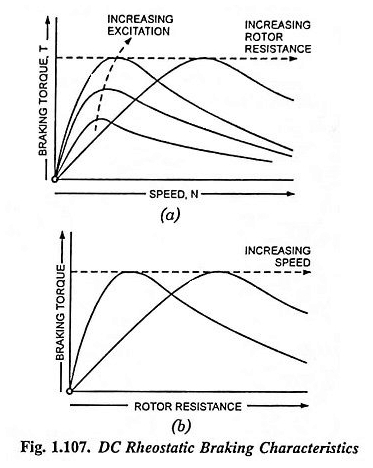
Die typischen Leistungseigenschaften einer Induktionsmotor sind in Abbildung 1.107 dargestellt.
Die Amplitude des vom Motors entwickelten Bremsdrehmoments hängt von der Anregung ab (Widerstand des Feldes, die durch die Rolle des Stators entwickelt wurden), des Widerstands des Rotorkreises und der Geschwindigkeit des Motors.
Die Auswirkung der Variation der I1 -Aufregung und des Rotor -R2 -Widerstands ist ebenfalls in Abbildung 1.107 (a) dargestellt. Für Konstruktionszwecke werden manchmal die in Abbildung 1.107 (b) dargestellten Drehmomentkurven verwendet.
Mit dem Anstieg des RO2 -Rotorwiderstandes steigt auch die Geschwindigkeit, mit der das maximale Bremsdrehmoment ebenfalls zunimmt. Das maximale Drehmoment würde jedoch nicht im Verhältnis zum aktuellen Quadrat (i21) zunehmen, wie durch die Gleichung angezeigt.
(1,85), da die XM -Magnetisierungsreaktanz aufgrund einer Sättigung abnimmt, die durch einen Anstieg des Stroms I1 verursacht wird.
Der stabile Bremsvorgang befindet sich auf dem Streetway -Teil der Drehmomentgeschwindigkeitskurve [dh auf der linken Seite der maximalen Drehmomentposition in Abbildung 1.107 (a)].
Bei versehentlich steigt die Geschwindigkeit über dem maximalen Drehmoment, eine neue Geschwindigkeitssteigerung wird durch eine Abnahme des Bremsdrehmoments verursacht, was zu einer neuen Geschwindigkeitserhöhung bei einer Last von Refiction führen kann.
Zu Beginn der Bremsanwendung benötigen wir daher einen hohen Widerstand im Rotorkreis, der mit einer Geschwindigkeitsabnahme allmählich reduziert werden muss.
Das Bremsdrehmoment kann von den folgenden zwei Methoden überprüft werden: (i) durch Kontrolle des Du du du du du Du Duc (ii) durch Variation des Widerstands gegen den Rotor.
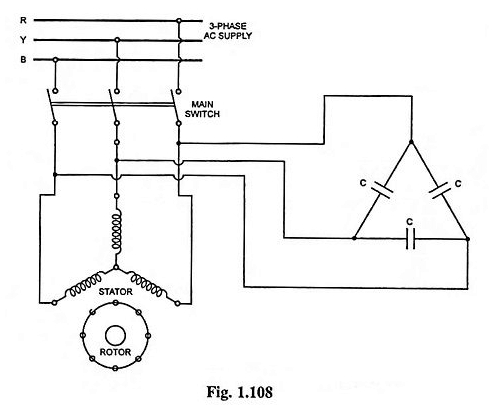
Dynamisches Wechselstrombremsen kann durch Selbsterdruck erhalten werden, indem Statorwicklungen mit einer Bank statischer Kondensatoren verbinden, wie in Abbildung 1.108 gezeigt. In diesem Fall arbeitet die Induktionsmaschine als Induktionsgenerator, der ihre AC -Aufregung von statischen Kondensatoren erhält.
Die erzeugte elektrische Energie wird in Form von Wärme im Rotorkreis abgeleitet. Dynamisches Wechselstrombremsen ist aufgrund der relativ hohen Kosten für Kondensatorbanken nicht beliebt.
Das dynamische DC -Bremsen erfordert wenig Strom für die Stromversorgung und sorgt für ein glattes Bremsmoment, das für Bergbauwicklungen und hohe Trägheitslasten nützlich ist.
Seine Vorteile im Vergleich zum Stecker sind das Fehlen des entgegengesetzten Drehungsfeldes [und daher keine Tendenz zur zurückzuführenden Maschine] und ein Verlust des niedrigeren Rotors. Durch Erhöhen des Rotorwiderstands kann das Bremsdrehmoment bei höheren Geschwindigkeiten effektiver gemacht werden.
Diese Methode ist daher sehr geeignet für verspätete Überprüfungsgebühren. Im Falle eines Eichhörnchen -Käfigmotors wird das Bremsdrehmoment mit sehr niedrigen Geschwindigkeiten nur nützlich, um die Ladung zu bringen, da der Widerstand gegen den Rotor gering ist.
Durch das Aufkommen der automatischen Steuerung der dynamischen Bremsung bei der elektrischen Bremsung von Polyphase -Induktionsmotoren unter Verwendung geschlossener Schleifensysteme wurden Induktionsmotoren beliebter als DC -Motoren, insbesondere für die Verwendung von Scheiben in Bergbaupalans.
Abbildung 1.109 zeigt die quadrantalen Eigenschaften des Induktionsmotors im dynamischen Bremszustand.

3.. Regenerative Bremsung
Regeneratives Bremsen ist ein inhärentes Merkmal einer Induktionsmotor, da es als Induktionsgenerator fungiert, wenn sie sich mit der Geschwindigkeit über Synchron erstreckt und die Stromversorgung an die Stromleitung zurückgibt.
Die dreiphasige Induktionsmotor kann so ausgelegt sein, dass sie mit hoher Geschwindigkeit bis zur Synchrongeschwindigkeit mit einem der folgenden Prozesse betrieben werden.
- Gehen Sie zu einer niedrigen Frequenzversorgung in frequenzgesteuerten Induktionsmotoren, um die Betriebsgeschwindigkeit des Lesers zu verringern.
- Bewegung eines beladenen Hebemechanismus wie Krane, Palans, Bagger usw.
- Gehen Sie zu einem größeren Pol-Betrieb von einem kleineren Multi-Gang-Eichhörnchen-Käfigmotoren.
In allen oben genannten Prozessen wird das entwickelte Verschiebung und das Drehmoment negativ, wie in Abbildung 1.110 dargestellt, und daher wirkt die Maschine als Generator, wodurch mechanische Energie erhält und es in Form von elektrischer Energie in das Stromversorgungssystem wiederhergestellt wird.
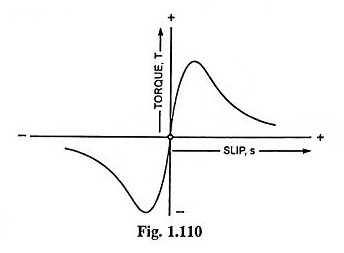
Wenn die Last den Motor über der Synchrondrehzahl verursacht, ist kein Schaltvorgang erforderlich. Sobald die Maschine über die Synchrongeschwindigkeit angetrieben wird, beginnt der Bremsvorgang automatisch.
Der Betriebspunkt hängt von der Amplitude des Lastdrehmoments und der Art des Merkmals der Drehmomentgeschwindigkeit der Maschine während des Erzeugungsbetriebs ab.
Durch die Variation des Widerstands im Rotorkreis ist es möglich, während des Bremens mit jeder Geschwindigkeit über der Synchrongeschwindigkeit zu arbeiten.
Für den Fall, dass das Lastdrehmoment der Last das maximale Bremsdrehmoment überschreitet, dessen Maschine fähig ist, wird das System instabil und die Geschwindigkeit wird weiter zunehmen, wahrscheinlich zu einem katastrophalen Wert, da die Maschine schnell funktioniert, wird das Bremsdrehmoment am wenigsten entwickelt.
Bei einem Induktionsmotor des Eichhörnchenkäfigs wird eine stabile Geschwindigkeit bei einer Geschwindigkeit erhalten, die erheblich höher als die Synchrongeschwindigkeit und die regenerative Bremsung kann nur angewendet werden, wenn der Motor speziell ausgelegt ist, um der übermäßigen Geschwindigkeit zu widerstehen.
Regeneratives Bremsen hat den Nachteil der Möglichkeit, nur bei supersynchronen Geschwindigkeiten zu bremsen, und wird folglich zum Bremsen von Seldome verwendet.
Diese elektrische Bremsmethode von Polyphase-Induktionsmotoren kann nur in der Art des Hubmechanismus oder mit einem Multi-Gang-Eichhörnchen-Käfigmotor verwendet werden. Es ist auch auf den Bergbahnen vorteilhaft.
Es gibt etwa 20% der Gesamtenergie an bestimmte Eisenbahnrennen zurück und spart viel Bremsschuhkleidung.