Geschwindigkeitskontrolle in geschlossener Schleife des Einführung von Motortraining:
Eine geschlossene Schleifengeschwindigkeitskontrolle für das Training mit Induktionsmotoren ist in Abbildung 6.43 dargestellt. Es verwendet eine innere Geschwindigkeitsschleife mit einem Schieber und einer externen Geschwindigkeitsschleife. Da für einen bestimmten Strom die Gleitgeschwindigkeit einen festen Wert hat, funktioniert die Schiebergeschwindigkeitsschleife auch als interne Stromschleife.
Darüber hinaus garantiert es auch, dass der Motorbetrieb immer auf der Geschwindigkeitsgeschwindigkeitskurve zwischen der Synchrongeschwindigkeit und der maximalen Drehmomentgeschwindigkeit für alle Frequenzen auftritt, wodurch ein hohes Drehmoment / Stromverhältnis gewährleistet ist.
Der Leser verwendet einen PWM -Wechselrichter, der von einer CC -Quelle genährt wird, die regenerative Brems- und Betriebskapazitäten mit vier Quadranten aufweist. Das Antriebsschema gilt jedoch für VSI- oder Cycloconverter -Player mit regenerativer oder dynamischer Bremskapazität. Der Betrieb des Lesers wird unten erläutert.
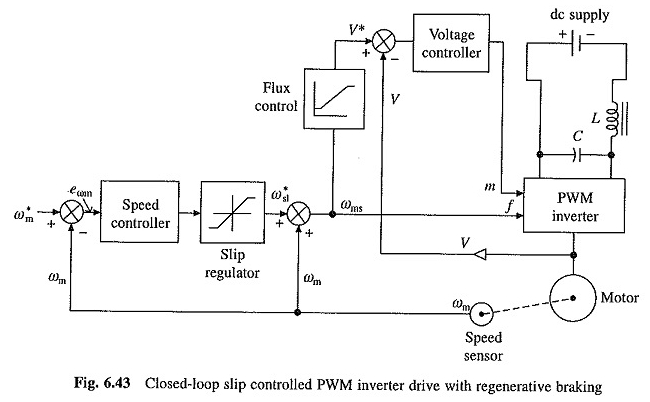
Der Geschwindigkeitsfehler wird über einen PI -Controller und einen Schiebegulator verarbeitet. Der PI -Controller wird verwendet, um eine gute Präzision im Gleichgewichtszustand zu erhalten und das Geräusch zu lindern.
Der Schiebegulator definiert die Schiebergeschwindigkeitskontrolle ω * SL, deren Maximalwert beschränkt ist, um den Strom des Wechselrichters auf einen autorisierten Wert zu beschränken. Die synchrone Geschwindigkeit, die durch Zugabe der tatsächlichen Geschwindigkeit ωm und der Gleitgeschwindigkeit ω * SL erhalten wird, bestimmt die Frequenz des Wechselrichters.
Das Referenzsignal für geschlossene Schleifengeschwindigkeitsregelung des Induktionsmotors der Spannung des V * -Maschinenanschlusses wird von der Frequenz F unter Verwendung eines Funktionsgenerators erzeugt.
Es garantiert fast einen konstanten Durchflussbetrieb für die Grundgeschwindigkeit und den Betrieb bei einer konstanten Klemmenspannung über der Grundgeschwindigkeit.
Eine Erhöhung der Schritte der Geschwindigkeitskontrolle ω * m erzeugt einen positiven Geschwindigkeitsfehler. Die Schiebergeschwindigkeitskontrolle ω * SL wird mit dem Maximalwert definiert.
Der Leser beschleunigt den maximalen Strom des autorisierten Wechselrichters und erzeugt das maximale verfügbare Drehmoment, bis der Geschwindigkeitsfehler auf einen kleinen Wert reduziert wird. Der Leser verformt schließlich eine Schiebergeschwindigkeit, für die das Motordrehmoment das Ladedrehmoment ausbalsiert.
Eine Abnahme der Geschwindigkeitskontrolle erzeugt einen negativen Geschwindigkeitsfehler. Der Befehl Slip Speed wird mit dem maximalen negativen Wert definiert.
Der Leser wird unter regeneratives Bremsen, maximal autorisierter Strom und maximal verfügbares Bremsmoment unterbrochen, bis der Geschwindigkeitsfehler auf einen kleinen Wert reduziert wird.
Jetzt bewegt sich der Betrieb zur Automobilisierung und der Leser wird mit der Gleitgeschwindigkeit eingestellt, für die das Motordrehmoment dem Lastdrehmoment entspricht.
Der Leser hat eine schnelle Antwort, da der Geschwindigkeitsfehler für das maximale verfügbare Drehmoment korrigiert wird. Die direkte Schiebeteuerung sorgt für den stabilen Betrieb unter allen Betriebsbedingungen.
Für den Betrieb über die Grundgeschwindigkeit hinaus muss die Schiebergeschwindigkeit des Gleitreglers mit der Frequenz linear erhöht werden, bis der Verteilungswert erreicht ist.
Dies wird durchgeführt, indem zur Ausgabe des Schiebegulators ein zusätzliches Gleitgeschwindigkeitssignal proportional zur Frequenz und eines geeigneten Vorzeichens hinzugefügt wird.
Bei Frequenzen über der Frequenz, für die das Ausfalldrehmoment erreicht ist, wird die Schiebergeschwindigkeit in der Nähe des Breakdown -Werts festgehalten.
Wenn eine schnelle Reaktion erforderlich ist, kann das maximale Gleit der Sünde gleich sein, da die Induktionsmotoren in kurzfristigen Übergangsoperationen mehrmals mehrmals den Nennstrom transportieren können.
Der Wechselrichter und sein Frontkonverter werden unter Verwendung von Halbleitergeräten gebaut, deren Übergangs- und dauerhafte Diätabmessungen gleich sind. Anschließend müssen die Noten des Wechselrichters und des Frontkonverters mehrmals als Strom des Motors ausgewählt werden.
Dies wird die Variationskosten erheblich erhöhen. Wenn keine schnelle Übergangsreaktion erforderlich ist, können die Wechselrichter- und Frontwandlerströme so ausgewählt werden, dass sie etwas höher sind als die des Motors.