Induktionsmotor -Drehmomentverschiebungseigenschaften:
Die Expression des Drehmomentschiebungseigenschaften des Induktionsmotors (T (S)) wird leicht erhalten, indem in Abbildung 9.12 das Äquivalent des Venin der Schaltung links von AB gefunden wird.
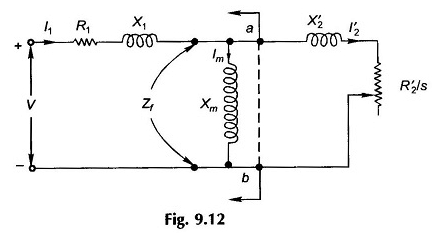
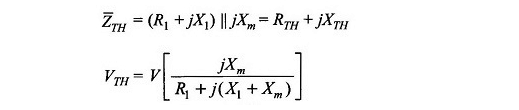
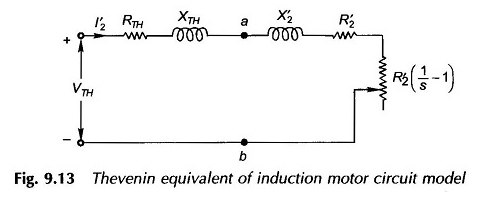
Die Schaltung wird dann in Abbildung 9.13 reduziert, in der es praktisch ist, VTH als Referenzspannung zu nehmen.
In Abbildung 9.13

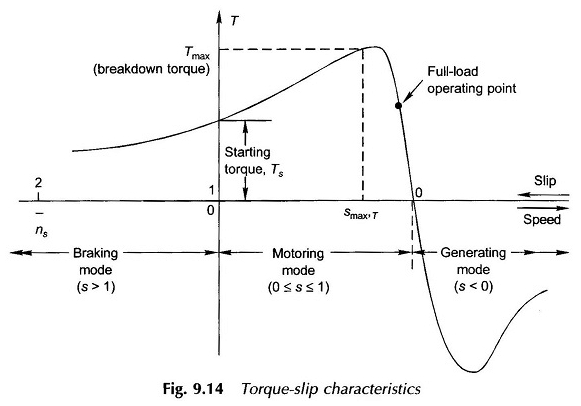
Die Gleichung (9.22) ist die Expression des als Funktion der Spannung und Verschiebung entwickelten Drehmoments. Für einen bestimmten Gleitwert ist das Drehmoment proportional zum Spannungsquadrat. Die Drehmoment -Gleiteigenschaften des Induktionsmotors an der festen Spannung (nominal) sind in Abbildung 9.14 verfolgt.
Die Eigenschaften des Drehmoments der Induktionsmotor -Schlupf sind nachstehend aufgeführt:
1. Motorie -Modus: 0 ≤ s ≤ 1
Für diesen Schlupfbereich ist der Lastwiderstand im Schaltungsmodell von Abbildung 9.13 positiv, dh die mechanische Leistung ist der Ausgang oder das entwickelte Drehmoment in der Richtung, in die sich der Rotor dreht. Auch:
- Das Paar ist bei s = 0 Null, wie durch qualitatives Denken vorgesehen.
- Das Drehmoment hat einen maximalen Wert, der als Fehlerdrehmoment (TBD) bei Slip Smax, T bezeichnet wird. Der Motor würde sich verlangsamen, bis er mit mehr als dem Ausfalldrehmoment beladen ist.
- Bei S = 1 heißt es, dass das Paar dem Startdrehmoment TS entspricht, wenn der Rotor stationär ist. In einem normalerweise gestalteten Motor ist TS viel geringer als TBD.
- Der normale Betriebspunkt befindet sich deutlich unter TBD. Der vollständige Ladungsschild beträgt in der Regel 2,8%.
- Das Drehmoment-Gleiteigenschaften der Motorinduktion des Ko-Laden-Verbots bei etwas über die Volllast hinaus sind nahezu linear.
2. Generierungsmodus: S <0
Die negative Verschiebung beinhaltet den Rotor, der mit einer super synchronen Geschwindigkeit (NS) arbeitet. Der Lastwiderstand ist im Schaltungsmodell von Abbildung 9.13 negativ, was bedeutet, dass die mechanische Leistung eingesetzt werden muss, während die elektrische Leistung an den Klemmen der Maschine ausgestorben ist.
3. Bremsmodus: S> 1
Der Motor arbeitet in der Richtung gegenüber dem Drehfeld (d. H. Negativ) und absorbiert die mechanische Leistung (Bremswirkung), die in Form von Wärme im Kupfer des Rotors abgeleitet wird.
Maximales Drehmoment (Belüftung):
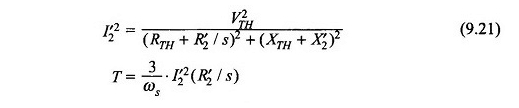
Während das maximale Drehmoment und die Verschiebung, in der es auftritt, können durch Differenzierung der Expression der Gleichung erhalten werden. (9.22) kann der Zustand für das maximale Drehmoment leichter aus dem maximalen Stromübertragungssatz der Schaltungstheorie erhalten werden.
Wie wir wissen, ist das Drehmoment maximal, wenn ich 22 (r’2 / s) maximal ist, dh in Abbildung 9.13 von R’2 / s absorbiert wird. Dieser Zustand wird als gegeben als

Ersetzen der Gleichung. (9.22) und vereinfachen

Es wird sofort beobachtet, dass das maximale Drehmoment unabhängig vom Rotorwiderstand (R’2) ist, während die Verschiebung, in der es auftritt, direkt proportional zu ihm ist.
Das Drehmoment -Gleitcharakteristik eines Induktionsmotors mit Gleitring kann leicht modifiziert werden, indem ein externer Widerstand hinzugefügt wird, wie in Abbildung 9.15a durch vier dieser Eigenschaften mit zunehmendem fortschreitenden Widerstand im Rotorkreis gezeigt. Wir können das je nach Gleichung sehen.
(9.24) bleibt das maximale Drehmoment gemäß der Gleichung unverändert. (9.23) Das gleitende bis zum maximale Drehmoment nimmt proportional zu, wenn der Widerstand zum Rotorkreis hinzugefügt wird.

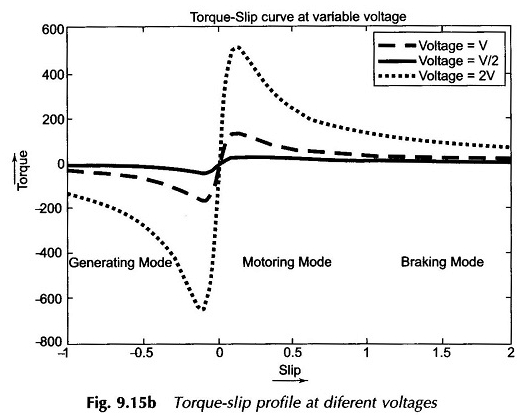
Abbildung 9.15b zeigt das TS -Profil mit verschiedenen Fütterungsspannungen an. Die Geschwindigkeit kann auch auf diese Weise gesteuert werden, indem die Statorspannung geändert wird. Es ist zu beachten, dass sich das Drehmoment in einem Induktionsmotor proportional zum Quadrat der Spannung des Terminals entwickelt hat.
Startpaar:
S = 1 in der Gleichung lassen. (9.22)

Das Startdrehmoment nimmt zu, indem der Rotorkreis einen Widerstand ergibt. Der Gleichung. (9.23) Das maximale Startdrehmoment wird erhalten für (Smax’t = 1)

Gleichzeitig verringert sich der Startstrom (siehe Gleichung (9.21)). Dies ist in der Tat der Vorteil des Gleitring -Induktionsmotors, bei dem ein hohes Startdrehmoment bei einem niedrigen Startstrom erhalten wird.
Eine Annäherung:
Manchmal ist es praktisch anzunehmen, dass die Impedanz des Stators eine Sensation (ungefähre Reaktion) des operativen Merkmals hat, dass die Impedanz des Stators vernachlässigbar ist, was führt (siehe Abb. 9.13)
![]()
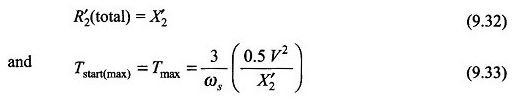
Im äquivalenten Schaltkreis von thevenin in Abbildung 9.13, so dass Vth = V. dann den Gleichungen (9.21) bis (9.26) folgt, das

Das maximale Startdrehmoment wird unter dem Zustand erhalten
Einige ungefähre Verschiebungsbeziehungen:
Um die Nenngeschwindigkeit (Volllast) um die Einführung des Induktionsmotors ist so klein, dass es so klein ist, dass
![]()
so dass x’2 in einer vereinfachten Analyse vollständig vernachlässigt werden kann. Gleichungen (9.27) und (9.28) vereinfachen Sie dann zu
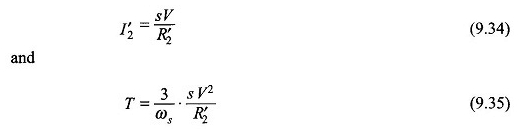
Es wird sofort aus der Gleichung beobachtet. (9.35) dass das Drehmoment -Gleiteigenschaften des Induktionsmotors im Bereich der niedrigen Verschiebung nahezu linear ist, was die lineare Form der Eigenschaft erklärt, wie in Abbildung 9.14 gezeigt.
Maximale Ausgangsausgabe:
Da die Drehzahl der Induktionsmotor mit der Last reduziert wird, entspricht die maximale mechanische Ausgangsleistung nicht der Geschwindigkeit (Gleiten), zu der ein maximales Drehmoment entwickelt wird. Für eine maximale mechanische Ausgangsleistung wird der Zustand aus Abbildung 9.13 erhalten

Die maximale Leistung kann dann gefunden werden, was der durch die Gleichung definierten Verschiebung entspricht. (9.36). Diese Bedingung entspricht jedoch sehr geringer Effizienz und einem sehr großen Strom und liegt weit über den normalen Betriebsbereich des Motors hinaus.
Einschränkung des Drehmomentschichteigenschaften des Induktionsmotors:
Die Werte der Schaltungsmodellparameter müssen unter Bedingungen bestimmt werden, die sich der Betriebsbedingung, für die das Modell verwendet werden muss, genau nähert.
Die gültigen Schaltungsmodellparameter für die normale Betriebsbedingung würden fehlerhafte Ergebnisse ergeben, wenn sie für abnormale Gleitwerte verwendet werden.
Bei Start -up zieht der Motor den Nennstrom mehrmals, was zur Sättigung des Kerns und zu einem erheblichen Anstieg der Stator- und Rotorlecksreakte führt. Darüber hinaus haben die Rotortreiber die Frequenz des Rotors hoch (identisch mit dem Stator).
Infolgedessen würden die Parameter für die normalen Betriebsbedingungen ein pessimistisches Ergebnis für den Startstrom (größer als den realen Wert) und das Startdrehmoment ergeben.