Induktionsmotor Startmethode:
Die Übergangsprozesse, die an der Startmethode der Induktionsmotor in einem variablen Geschwindigkeitsantrieb beteiligt sind, erfordern eine detaillierte Studie. Der Elektromotor und die angeschlossene Last beschleunigen die Nenndrehzahl von Ruhe unter dem Einfluss des Startdrehmoments.
Der Übergangsbetrieb während dessen ist zufriedenstellend, wenn ein ausreichend gutes Startdrehmoment mit einem reduzierten Wert des Startstroms entwickelt wird, um den Rotor in der gewünschten Zeit zu beschleunigen.
Die Notwendigkeit, den Start -up -Strom zu begrenzen, erfolgt aufgrund starker Abfälle in der Motorspannung nach den Stromabfahrten.
Die verwendeten Start -up -Geräte müssen in der Lage sein, diese Hohlräume von der Spannung zu einem tolerierbaren Wert zu minimieren, damit andere Netzwerkgeräte nicht betroffen sind.
Der Startstrom wirkt sich auch auf den Motor aus. Hochstart -UP -Ströme erhitzen den Rotor. Wenn der Start -up häufig ist, muss die Erwärmung reduziert oder begrenzt werden. In DC -Maschinen erzeugen hohe Start -ups Funken mit Bürsten. Für einen guten Wechsel müssen die Startströme begrenzt sein.
Beim Betrieb des Konverters beeinflussen zusätzliche Harmonische des Stroms die Umschaltung. Diese Wechselprobleme bei kontinuierlichen Strommotoren aufgrund von Wellen können durch Erhöhen (richtig) die Anzahl der Impulse des Leistungswandlers und durch Ändern des Designs des Motors selbst aufgelöst werden, z.
Das Startdrehmoment muss eine gleichmäßige Beschleunigung erzeugen. Die Beschleunigungszeit muss verkürzt werden, um die Produktivität zu verbessern und die während des Start -up verlorene Energie zu verringern.
Der Zweck des Startens der Ausrüstung in einem Elektromotor besteht darin, den Startstrom zu begrenzen und nach Möglichkeit ein einigermaßen gutes Startdrehmoment zu liefern, damit der Motor in der gewünschten Zeit bei Nenndrehzahl beschleunigt.
Bei kontinuierlichen Strommotoren ist der Startstrom mit zusätzlichem Widerstand in Reihe mit der Verstärkung begrenzt. Der Motor wird mit einem kompletten Feld eingeschaltet. Dies wird tatsächlich den Beginn der Spannung verringert.
Thyristor -Leistungswandler, die für die Geschwindigkeitsregelung verwendet werden, können ebenfalls verwendet werden, um zu beginnen, da die Spannung glatt ist und die Startverluste fehlen.
Die Startmethode der Induktionsmotor hat die folgenden Methoden:
- Direkt online beginnen
- Niedrige Spannungsstart
- Rotorwiderstand starten
- Niedriger Frequenzstart
- Spezielle Rotorkonstruktion.
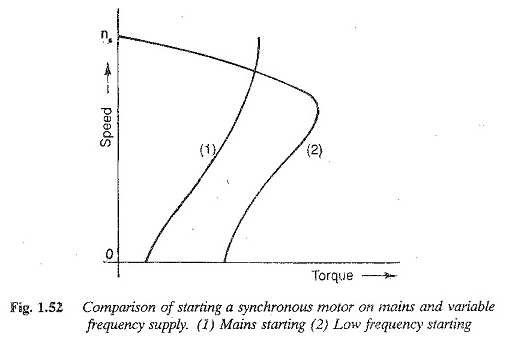
Synchronen Motoren sind nicht autonom, werden jedoch von einem Hilfsmotor oder dem Prinzip des Induktionsmotors gestartet. Die Stoßdämpferwicklungen werden als Startwinde verwendet. Um ein Selbstsynchron zu machen, wird ein Wundrotor verwendet.
Es ist mit zusätzlichem Widerstand beim Start kurzfristig und wird von einem CC genährt, wenn sie mit einer synchronen Geschwindigkeit beschleunigt werden. Ein synchroner Motor kann auch mit einem Wechselrichtersystem für variable Frequenzen gestartet werden. Ein Vergleich der variablen Frequenz beginnend mit dem Beginn des Sektors ist in Abbildung 1.52 angegeben.
Energiebeziehungen während des Starts -up:
Um geeignete Startgeräte auszuwählen, zum Beispiel der Start -Rheostat in einem Shunt -Motor, ist es erforderlich, den Energieverlust während des Start -up zu bestimmen.
1. Der Energieverlust während des Start -up ist der KE der Drehsteile bei endgültiger Geschwindigkeit. Die gleiche Energie stammt aus der Ernährung. Folglich ist die gesamte elektrische Energie, die aus der Stromversorgung während des Starts entnommen wird
![]()
Oder
- Ωs ist die endgültige Geschwindigkeit im Tierheim.
Als es gegen eine TL -Drehmomentlast begann, ist der Totalverlust in der Gerüstschaltung 
wobei ωl die Geschwindigkeit mit der TL- und TLF -Last ist der Energieverlust aufgrund des Lastdrehmoments und wird gegeben 
Im Falle der Motoren der DC -Serie hängt der Energieverlust von R ab und wird von gegeben

2. Bei einer Startmethode eines Induktionsmotors wird zusätzlicher Rotorwiderstand verwendet. Der Energieverlust des Rotorwiderstands ist der KE der Drehsteile. Ein Teil der Energie wird auch im Widerstand des Stators abgeleitet. Die totale Energie verlor während des Starts -ups -ups

Ein Anstieg des Rotorwiderstands verringert den Energieverlust beim Widerstand des Stators, während er den Verlust des Widerstands gegen den Rotor selbst nicht beeinflusst. Dies verkürzt die Beschleunigungszeit.
Wenn der Motor bei der Last beginnt

wobei TD und TL Schlupffunktionen sind. Die Integration von ΔWSL aus 0-Ablieferung ergibt den gesamten Energieverlust. Wenn die Eichhörnchen -Käfigmotoren direkt von der Linie aus gestartet werden, gibt es eine minimale Energieableitung, da das entwickelte Drehmoment mit vollständiger Spannung groß ist.
Mit niedriger Spannungsstart -UP nimmt TD ab und steigt die Energieverschwendung an, selbst wenn der Startstrom abnimmt. Dies kann auf die Zunahme der Beschleunigungszeit auf eine niedrige Spannungsstart -up zurückgeführt werden.
In Eichhörnchen -Käfigmotoren geht die gesamte Energie in der Maschine selbst verloren, während in den Rotoren der Gleitringe ein externer Widerstand zur Ablassung der Energie verwendet werden kann, wodurch die Wärme des Motors minimiert wird, aber die Startzeit erhöht.
Dynamik des Starts des Elektromotors:
Der Beginn des Elektromotors wird normalerweise mit abgestuften Widerständen durchgeführt, die beim Beschleunigen des Motors langsam geschnitten werden. Die Klassifizierung basiert auf zwei Grenzen, zwischen denen der Startstrom variieren kann. Dynamik während des Start -up kann erforderlich sein, um die Werte dieser Widerstände wirklich zu entdecken.
DC Shunt Motor:
Wenn ein Shunt -Motor unter Last beschleunigt wird, sind die Gleichungen 
Verwenden dieser Beziehungen, die wir haben

Oder
- ω0 ist die Geschwindigkeit des Nichtladings
- Ωl ist der Geschwindigkeitsabfall unter Last
- TM ist die mechanische Zeitkonstante.
Wenn der Motor von ω1 bis ω2 beschleunigt wird, kann die Lösung dieser Gleichung als erhalten werden
![]()
Wenn die Beschleunigung von Null bis ω0 liegt, haben wir
![]()
Am Anfang fällt der Strom, wenn der Motor aufgrund des Konstruktions der hinteren EMF beschleunigt wird. Der Verstärkungsstrom fällt exponentiell als ![]()
Wo I1 der Startstrom ist und es der Endwert ist. Wenn die Beschleunigung geschützt ist
![]()
Die Beschleunigungszeit kann mit diesen Beziehungen bestimmt werden. Wenn ein Starter in mehreren Schritten verwendet wird, ist die Zeit, die für den Strom von i1 bis i2 zu halten ist 
Die mechanische Zeitkonstante unterscheidet sich in verschiedenen Stadien und wird durch gegeben
Der Ex -Wert wird unter Verwendung des Wertes der Geschwindigkeit erhalten, die exponentiell erhöht. Schließlich die Gesamtbeschleunigungszeit

Induktionsmotor:
Wir können die Übergangsbedingungen in einer Dreiphasen -Induktion -Engine analysieren, um die Beschleunigungszeit zu bestimmen. Es ist bekannt, dass durch korrektes Einstellen des Widerstandes am Rotor das maximale Drehmoment bei Start -up erfolgen kann.
Die Analyse zeigt jedoch, dass dies nicht die minimale Beschleunigungszeit ergibt, die erhalten wird, wenn der Rotorwiderstand ausgewählt wird, sodass das maximale Drehmoment bei einem Gleiten von 0,407 auftritt.
Das bei jeder Verschiebung entwickelte Paar wird von gegeben

Unter der Annahme, dass die Beschleunigung im Tierheim stattfindet, beschleunigt das entwickelte Drehmoment den Rotor

Darüber hinaus gehen wir davon aus, dass Nicht-Last-Geschwindigkeit eine Synchrongeschwindigkeit ist. Verwenden der obigen Gleichungen, die wir haben

Form, wer

wobei tm = jωs ∕ tdm die mechanische Zeitkonstante des Motors ist. Der Motor beginnt von der Ruhe und erstreckt sich auf eine leere Geschwindigkeit. Die Verschiebung variiert von 1 zur Kunst. Integration der Gleichung. 1,82 zwischen diesen Grenzen haben wir

Wenn die endgültige Verschiebung S = 0,03 sein soll, ist die Startzeit TST

Der minimale TST -Wert wird durch erhalten durch

Das ergibt SM = 0,407. Der TST ∕ TM -Bericht als Funktion von SM ist in Abbildung 1.51 dargestellt, um den Rotor in der Zeit zu beschleunigen, dass das effektive Drehmoment ist 
Dies zeigt erneut, dass die Startzeit ein Minimum ist, wenn das Startdrehmoment 0,81 TDM beträgt. Dies geschieht erneut, wenn TDM bei SM = 0,407 auftritt.
Eine Einweihungsmotor -Startmethode kann erstellt werden, um mindestens die Zeit zu beschleunigen, wenn das Startdrehmoment das maximale Drehmoment des maximalen Drehmoments beträgt und das maximale Drehmoment bei SM = 0,407 erfolgt.