Einführung von Motorvektorsteuerung:
Die einzige Idee hinter der Vektorsteuerung des Induktionsmotors besteht darin, einen elektrischen Leser zu haben, der eine höhere Leistung bieten muss, die der CC -Motor in der Branche separat angeregt hat.
Darüber hinaus sollte ein solcher Leser als robuste, zuverlässige Alternative ohne Wartung und billiger des CC -Players auftreten. Vor einigen Jahren wurde der getrennte DC -Motor als Hauptarbeitspferd in der Industrie angesehen.
Dies liegt an der schnelleren dynamischen Leistung im Vergleich zum Einführungsmotor. Die schnellere dynamische Reaktion des CC -Motors liegt in seinem doppelt genährten Motor mit einer Installation, die einem Drehmoment und einer Strömungsregelung im Motor inhärent ist.
Vor der Einführung der Vektorsteuerung des Induktionsmotors werden die Methoden, die bei der Kontrolle des Antriebs des Käfiginduktionsmotors eine breite Akzeptanz genossen haben, als Spannungsregelung, Frequenzregelung, Rotorwiderstandskontrolle, V / F -Steuerung, Durchflussregelung, Schiebung der Schiebung, Wiederherstellungsregelung der Schiebleistung usw. bezeichnet, usw.
Alle diese Kontrollmethoden werden als skalare Steuerung eines Induktionsmotors qualifiziert, und mit diesen weist der Käfigmotor eine geringere dynamische Leistung im Vergleich zum separat angeregten Motor auf.
In ihren Bemühungen, einen wartungsfreien, robusten und leistungsstarken AC -Leser zu haben, wollte der Forscher die Leistung und verbesserte CC -Motoreigenschaften getrennt mit einem Induktionsingenieur mit einem Käfigrotor erzielen.
In diesem Sinne führte Blaschke das Konzept der Vektorsteuerung der Induktionsmotor ein. Blaschke führte 1972 das Orientierungsprinzip vor Ort ein, um die Eigenschaften des DC -Motors in einem Induktionsmotorantrieb auszuführen.
Für dasselbe verwendete er die entkoppelte Kontrolle des Drehmoments und des Flusses im Motor und gab seinen Namen als Kontrolle des Transvektors an.
Der Leser der Cage Induction Engine mit Steuer- oder Feldsteuerung bietet ein hohes Maß an dynamischer Leistung und Closed -Loop -Steuerung, die mit diesem Leser verbunden ist, bietet die langfristige Stabilität des Systems.
Obwohl es keinen großen Unterschied zwischen Skalar- und Vektorkontrollen gibt, hat dieser bestimmte Eigenschaften, die es als Kontrollsystem mit hoher dynamischer Leistung günstig machen.
Die Vektorsteuerung wird auch als unabhängige oder entkoppelte Kontrolle bezeichnet, bei der das Drehmoment und die Durchflussstromvektoren überprüft werden.
Es ist eine gut festgelegte Tatsache, dass im Vektorsteuermodus der Leser des Käfigmotors linearisiert ist und sich wie ein vollständig kompensierter kontinuierlicher Strommotor verhält, bei dem die Kontrolle des Verstärkungsstroms direkt das vom Leser entwickelte elektromagnetische Drehmoment beeinflusst.
In ähnlicher Weise werden in der Käfigmotor die Vektorsteuermethode, die beiden Quadraturströme, die für die Durchflussproduktion bzw. das Drehmoment verantwortlich sind, unabhängig gesteuert und die Reaktion der aktuellen Drehmomentproduzentenkomponente ist sehr schnell, wodurch eine schnellere Drehmomentregelung gewährleistet ist und der Leser ein hohes Maß an dynamischer Leistung hat.
In einem breiten Sinne wird die Kontrolle des Induktionsmotors des Käfigs, wie er sich wie ein vollständig kompensierter kontinuierlicher Strom -Motor verhält, als Vektor bekannt.
In diesem Fall werden die Statorströme in Bezug auf ein Koordinaten -Framework ausgedrückt, das mit dem Synchronismus mit dem Stator- oder Rotor -MMF -Vektor ausgeführt wird.
Die auf diesen Koordinaten ausgedrückten Statorströme werden in zwei orthogonalen Komponenten aufgelöst, die den Fluss und das Drehmoment im Motor erzeugen. Diese ähneln dem kontinuierlichen Strommotor, bei dem das Drehmoment und der Fluss durch unabhängig steuerende Steuersrahmen von Verstärkung und Feld gesteuert werden.
Um das Drehmoment und die Strömung (so Geschwindigkeit) unabhängig im Induktionsmotor zu steuern, muss die Amplitude und die Phase der drei Statorströme (IAS, IBS, ICS) durch einen schnellen Wechselrichter gesteuert werden.
Zu diesem Zweck wird normalerweise ein CC-TVSI (Stromspannungsquellen-Wechselrichter) verwendet. Ein solcher Kontrollalgorithmus wäre sehr involviert.
Die Verwendung besteht aus der Transformation von drei bis zwei Phasen (eine bekannte Matrixoperation). Die zwei Phasenströme, die IDs und die IQs in Phasenquadratur erfordern die Kontrolle über die beiden Amplituden und eine Phase, was durch Kontrolle des Vektors durchgeführt wird.
Die Vektorsteuerung der Induktionsmotormethode ist die Form des Blockdiagramms ist in Abbildung 11.63 einige entscheidende Stufen sind wie folgt.
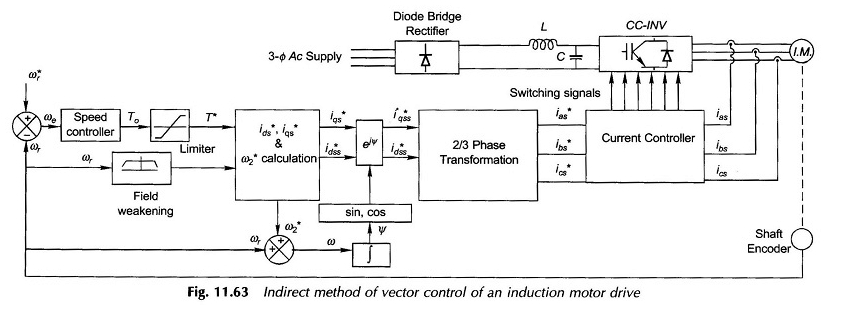
Aus dem Motordrehzahlsignal (ωr) und der gewünschten Geschwindigkeit (ω * r) wird der Fehler ωe bestimmt. Der Geschwindigkeitsregler berechnet das Motordrehmoment (an), das erforderlich ist, um die Geschwindigkeit zu korrigieren, die einen Limiter durchläuft, um das Drehmomentsignal T *zu bestimmen.
In einem parallelen Feldblock, einem schwächenden Block, erzeugt die Motordrehzahl ωr ein weiteres Signal.
Diese beiden Signale werden verwendet, um die I * ds und i * qs (ideale Quadraturströme) und eine Geschwindigkeitskorrektur ω * 2 zu berechnen.
Ω = ωr + ω * r wird integriert, wodurch dann die Transformation EJψ ermittelt wird. Diese Transformation (i * ds, i * qs) gibt das letzte ideale Set (i * dss, i * qss).
Die Phase 2/3 -Transformation auf (i * dss, i * qSS) gibt den idealen Statorstrom (i * as, i * bs, i * cs).
Die gemessenen Statorströme (IAS, IBS, ICs) werden von der Stromregler mit (i * AS, i * bs, i * cs) verglichen und die sechs Signale erzeugten die vom Induktionsmotor angetriebenen Ströme.
Das obige ist eine vereinfachte Erklärung des Vektorsteuerungsalgorithmus zur Steuerung des Induktionsmotors.
Bei der Steuerung des Induktionsmotorvektors wird der Rotorstrom reguliert, indem der Statorwicklungsstrom gesteuert wird. Um den Rotorfluss zu regulieren, ist auch die Kenntnis seiner Position gewünscht. Die Position des Rotorstroms wird nachgewiesen oder geschätzt.
Infolgedessen wird nach den Methoden zur Beurteilung der Position des Rotorströmungsvektors die Vektorkontrolle entweder als direkte Vektorkontrolle oder indirekte Vektorkontrolle bezeichnet.