Induktionsmotorantrieb mit dem Wechselrichterwechselrichter:
Der Leser des Induktionsmotors, der an der Stromquelle gefüttert wurde – In einem Spannungsquelle -Wechselrichter ist der mit Induktion gefütterte Induktionsmotor die auf den Stator angelegte Spannung proportional zur Frequenz, wobei eine Korrektur für den Widerstandsabfall des Stators, insbesondere bei niedriger Geschwindigkeit, den konstanten Fluss aufrechterhalten wird.
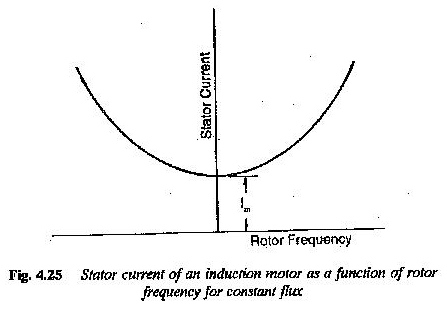
Es ist eine gut bekannte Tatsache, dass der von einem Induktionsmotor gezogene Strom nicht von der Frequenz des Stators abhängt, wenn der Luftraumstrom konstant ist. Es besteht eine feste Beziehung zwischen der Schlupffrequenz und dem Statorstrom für den Nennstrom im Luftraum, wie in Abb. 1 gezeigt.
4.25. Durch Steuern des Motorschiebs kann der Statorstrom überprüft werden. Die indirekte Flussregelung ist daher möglich. Die Kontrolle ist einfacher als die Spannungsregelung. Die Kurve zwischen der Schlupffrequenz und dem Statorstrom kann mit dem äquivalenten Schaltkreis berechnet werden. Ein PWM -Wechselrichter kann überprüft werden, um die gewünschten Strömungen im Motor bereitzustellen.
In einem CC -Bindungswandler wird der Wechselrichter, wenn der CC -Verbindungsstrom überprüft wird, als aktueller Quellwechselrichter bezeichnet. Der Strom in der CC -Verbindung wird durch eine hohe Induktivität konstant und die Kapazität des Filters verteilt.
Die variable CC -Bindungsspannung wird mittels Induktivität in eine Induktionsmotor umgewandelt. Das DC -Angebot ist von großer Impedanz.
Da der Verbindungsstrom konstant bleibt, wird die Ausgangsstromwellenform durch den Betrieb des Wechselrichters bestimmt, während die Ausgangsspannung durch die Art der Lastimpedanz bestimmt wird.
Ein mit dem aktueller Wechselrichter im aktueller Wechselrichter gefütterter Einweihungsmotor ist für Lasten geeignet, die eine geringe Impedanz mit harmonischen Strömen haben und eine PF -Einheit haben
Eine mit dem aktuelle Wechselrichter gefütterte Einweihungsmotor hat eine sehr einfache Konfiguration. Es sind keine Rückkopplungsdioden erforderlich. Ein kontrollierter Gleichrichter in der Phase wird an der Seite der Linie verwendet, um die Stromregelung bereitzustellen.
Da die CC -Verbindung nur Induktivität enthält, ist eine Regeneration möglich, indem die Polarität der Spannungen geändert und die Stromrichtung aufrechterhalten wird. Daher ist ein Leser von vier Quadranten einfach und einfach.
Es bietet einen effektiven Puffersturm des Wechselrichterausgangs aus den Versorgungsspannungsvariationen. Die direkte Kontrolle des Statorstroms ermöglicht es, eine präzise Steuerung der geschlossenen Schleife relativ leicht zu implementieren.
Das Umschalten des Wechselrichters hängt von der Last ab. Die Lastparameter sind Teil des Schaltkreises. Es ist daher eine Korrespondenz zwischen dem Wechselrichter und dem Motor erforderlich. Der multimotorische Betrieb ist nicht möglich.
Der Wechselrichter muss notwendigerweise eine gemeinsame Kraft sein, da der Induktionsmotor nicht die Blindleistung des Wechselrichters liefern kann.
Der konstante CC-Verbindungsstrom kann durch Steuern des Wechselrichters durch die Motorphasen fließen, und daher ist der Motorstrom eine quasi-Carré-Welle. Die Motorspannung ist aufgrund des Schaltens fast sinusförmig mit Etagenpunkten.
Diese Spannungsspitzen entscheiden über die Bewertung der Spannung der THVRISTORS und beeinflussen auch die Isolierung des Motors. Diese Punkte können begrenzt sein, wenn die Maschine eine kleine Leckagereaktanz hat oder wenn die Kommunikationskondensatoren groß sind.
Eine Maschine mit einer kleineren Leckage -Reaktanz ist für den Betrieb des Induktionsmotors des Wechselrichters der Stromquelle geeignet, um die Spannungsspitzen und die harmonischen Verluste zumindest aufrechtzuerhalten. Die Wirkung von Drehmomentpulsationen nimmt ab und die Betriebsfrequenz kann erhöht werden.
Die Schaltkapazität wird ausgewählt, um die Spannungspitzen und die höchste Betriebsfrequenz zu beeinträchtigen. Das Schalten erfordert einen endgültigen Mindeststrom. Der Wechselrichter hat die Möglichkeit, sich von einem Schaltausfall zu erholen.
Die Verbindungsinduktivität führt zu einem langsamen Anstieg des Fehlerstroms, und wenn er hohe Werte erreicht, kann der Defekt beseitigt werden.
Der Leser stellt Stabilitätsprobleme bei leichten Ladungen auf. Der Betrieb der offenen Schleife ist nicht möglich. Es hat eine sehr breite Palette der Geschwindigkeitskontrolle, aber die dynamische Leistung ist schlecht.
Der Antriebsmotor erfordert eine Verengung aufgrund harmonischer Verluste und der damit verbundenen Heizung. Drehmomentpulsationen sind vorhanden und ihre Amplitude ist aufgrund der zusätzlichen Harmonischen im Fluss des Rotors bei niedriger Betriebsfrequenz groß. Der Leitungsleistungspunkt ist aufgrund der Phasenkontrolle schlecht.
Bis zur Nennfrequenz befindet sich der Leser im konstanten Drehmomentmodus und über der nominalen Frequenz, die sich der Leser im konstanten Pferdemodus befindet.
Der Statorstrom eines Induktionsmotors, der auf einer variablen Frequenz betrieben wird, ist die variable Spannungsleistung unabhängig von der Statorfrequenz, wenn der Luftformstrom konstant gehalten wird. Es hängt jedoch von der Frequenz des Rotors ab.
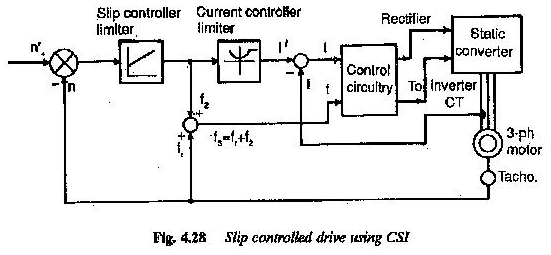
Das entwickelte Drehmoment hängt auch nur von der Frequenz des Rotors ab. Unter Verwendung dieser Eigenschaften kann ein schieber kontrollierter Leser (Abb. 4.28) unter Verwendung eines aktuellen Quellwechsels zur Lieferung eines Induktionsmotors entwickelt werden.
Die Beziehung zwischen der Frequenz des Rotors und dem Statorstrom für den Nennfluss im Aerogap wird in der Kontrolle eingeführt. Somit ist eine indirekte Flussregelung möglich. Der Auslass des Funktionsgenerators gibt den Referenzwert des Stroms an.
Der gemessene Strom wird mit dem Referenzwert verglichen und der Fehler wird verwendet, um den Aufnahmewinkel des Konverters zu ändern, der auf der Seite der Linie überprüft wird.
Der Eingang des Funktionsgenerators ist die Differenz zwischen der Referenzgeschwindigkeit und der tatsächlichen Geschwindigkeit und kann als Gleitfrequenz angesehen werden, die der Frequenz hinzugefügt wird, die der Drehzahl des Rotors entspricht, wodurch der Wert der Statorfrequenz und der Wechselrichter auf der Maschinenseite gesteuert werden, um diese Frequenz zu ergeben.
Die Steuerung ist in Betrieb, bis der Rotor die gewünschte Geschwindigkeit mit der erforderlichen Gleitfrequenz erreicht.
Der von Slide kontrollierte Leser bietet die folgenden Vorteile:
1. Der kontrollierte Slip -Leser ist sehr effektiv.
2. Eine präzise Drehmomentregelung ist in einem weiten Geschwindigkeitsbereich möglich.
3. Die Gleitfrequenz kann jeder Wert für den Wert sein, der dem Fehlerdrehmoment entspricht. Der Betrieb ist ein sehr guter Leistungsfaktor. Der Betrieb ist sehr stabil.
4. Der Rotor kann durch die Aufrechterhaltung der Frequenz des Rotors zu einem konstanten und informierten Drehmoment zu einem geeigneten Wert beschleunigt werden. Schnelle Beschleunigung.
5.com, dass dies zum weichen Start führt, dass der Motor nicht die Rotorströme blockiert und die zugehörigen Spannungsschlupfe nicht vorhanden sind.
6. Spezielle Rotoren mit hohem Startdrehmoment sind nicht erforderlich. Rotoren mit niedrigem Widerstand können verwendet werden, damit die Verluste begrenzt sind.
7. Regenerative Bremsung kann eingebaut werden. Das Bremsen auf ein konstantes Drehmoment ist möglich.
8.Der Leser hat eine Effizienz, die mit einem Thyristorisierten CC -Spieler vergleichbar ist.
Die zusätzlichen Vorteile der Induktionsmotoren des Eichhörnchenkäfigs wie dem Hochleistungs -Gewicht -Verhältnis, weniger Wartung, einer niedrigen Trägheit, keine Einschränkung der Leistungsbereiche und der Geschwindigkeitsbereiche machen den Slip die Scheibe zu einem echten Konkurrenten für die DC -Leser.
Ausgewählte harmonische Eliminierungsmethoden oder PWM -Prinzipien können verwendet werden, um die Auswirkungen von Drehmomentimpulsen, insbesondere bei niedriger Geschwindigkeit, zu verringern.
In diesen Methoden kann die Steuerung erhalten werden, indem der CC -Verbindungsstrom steuern und das PWM -Prinzip dann nur verwendet werden können, um den harmonischen Gehalt der Stromwellenform zu steuern.
Diese Trennung der aktuellen und harmonischen Kontrollfunktionen ermöglicht die Auswahl der PWM -Steuerungsstrategie, die nur Pulsationen des Motordrehmoments verbessern und harmonische Verluste verringert.
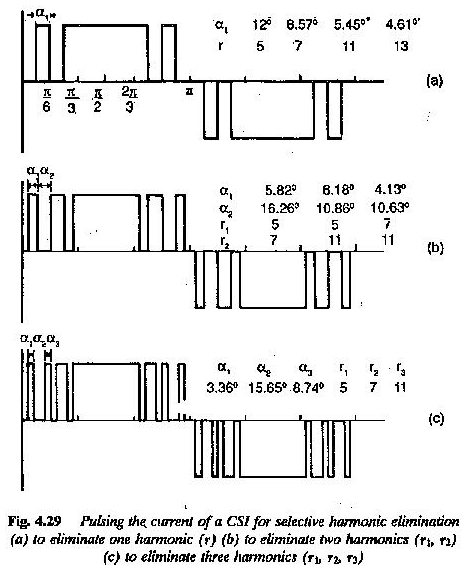
Der Großteil der PWM -Strategien für eine Einweihungsmotor im aktuellen Quellwechselrichter basiert auf ausgewählten Harmonic -Elimination -Techniken.
Sie werden verwendet, um die Harmonischen des Zustands des Statorstroms zu beseitigen, und die Methoden verursachen die Eliminierung niedrigerer Drehmomentwellen (Abb. 4.29).
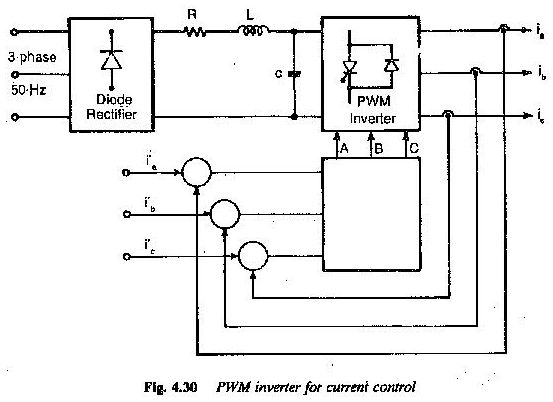
In den letzten Jahren wurden PWM -Strategien speziell entwickelt, um die Flussgeschwindigkeit aufgrund der Pulsation des Drehmoments zu minimieren, um ein Training mit reibungsloser Drehung bei niedriger Geschwindigkeit zu verursachen (Abb. 4.30).
Die allgemeinen Merkmale des mit dem Wechselrichters des aktuellen Wechselrichters ernährten Einführungsmotors können wie folgt zusammengefasst werden:
1. Download abhängiger Schalter: Da die Lastparameter Teil des Schaltkreises sind, muss der Wechselrichter und der Motor angezeigt werden.
2. Der Wechselrichter hat eine einfache Konfiguration. FWDs fehlen.
3. Ein einzigartiger Motorbetrieb
4. Die CC -Verbindung enthält nur Induktivität. Um einen konstanten Strom aufrechtzuerhalten, muss er sehr wichtig sein. Der Betrieb von zwei Quadranten ist einfach
5. Erhöhen, ein kontrollierter Gleichrichter in der Phase ist an der Seite der Linie erforderlich. Die variable CC -Bindungsspannung wird mittels einer hohen Bindungsinduktivität in eine konstante Stromquelle umgewandelt.
6. Der Wechselrichter ist gewaltsam, um den Motor mit variablen Frequenzströmen zu versorgen.
7. Der Kapazitätswert ist ein Kompromiss zwischen den Spannungsspitzen und der höchsten Betriebsfrequenz. Die Kapazität ist größer, die Spannung ist geringer, die höchste Betriebsfrequenz ist ebenfalls begrenzt.
8. Die Reaktanz der Motorlecks beeinflusst harmonische Spannungen. Er ist auch für Spannungspeaks während des Schaltens verantwortlich.
Die Reaktanz von Lecks ist ein Parameter des Schaltkreises, bestimmt die Schaltzeit und daher ist die höhere Betriebsfrequenz begrenzt.
Ein Motor muss eine geringere Leckagereaktanz haben, um harmonische Spannungen und Spannungsspitzen zu reduzieren und den Geschwindigkeitsregelbereich zu erhöhen. Die Peaks beeinflussen die Bewertung des Thyristors und beeinflussen die Isolierung. Die Größe des Motors wird größer, wenn die Lecksreaktanz gering ist.
9. Konverterqualität Thyristoren sind ausreichend. Die Verwendung von Thyristor ist gut
10. Lander erholen sich von dem Ausfall des Umschaltens. Die Verbindungsinduktivität führt zu einem langsamen Anstieg des Fehlerstroms und kann, wenn er einen hohen Wert erreicht, gelöscht werden.
11. Es ist ein Problem der Lichtlaststabilität. Ein Mindeststrom sollte zum Umschalten vorhanden sein.
12. Die Funktionen der Betriebsschleife sind nicht möglich. Die dynamische Antwort ist langsam
13. Die PF -Linie ist aufgrund der Phasenkontrolle mittelmäßig.
14. Finden Sie die Anwendung als durchschnittlich auf hohe Schulungen vor
15. Die Impulse verursachen Geschwindigkeitsschwingungen bei sehr niedrigen Geschwindigkeiten. PWM -Strategien werden verwendet, um Geschwindigkeitsschwingungen zu entfernen und reibungslos zu betreiben.
16.Das Is sind das konstante Drehmoment und die Leistungsoperationen konstanter Pferde möglich.