Drehmomentdrehzahl der Induktionsmotor: Merkmale:
Der Gleichung. 1.27 Es kann beobachtet werden, dass das maximale Drehmoment unabhängig vom Rotorwiderstand ist. Die Verschiebung, in der das maximale Drehmoment auftritt, ändert sich jedoch mit dem Rotorwiderstand.
Wenn der Rotorwiderstand zunimmt, beträgt das Schieben für das maximale Drehmoment ebenfalls ein maximales Drehmoment und der stabile Betriebsbereich des Motors steigt. Die typischen Eigenschaften der Geschwindigkeit des Drehmoments des Induktionsmotors für verschiedene Rotorwiderstandswerte sind in Abbildung 1.22 dargestellt.
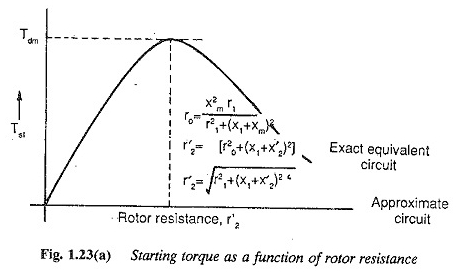
Aus der Abbildung stellen wir fest, dass das Startdrehmoment durch Erhöhen des Widerstands gegen den Rotor erhöht werden kann. Das maximale Drehmoment tritt bei Start -up auf, wenn der Rotorwiderstand auf einen Wert erhöht wird.

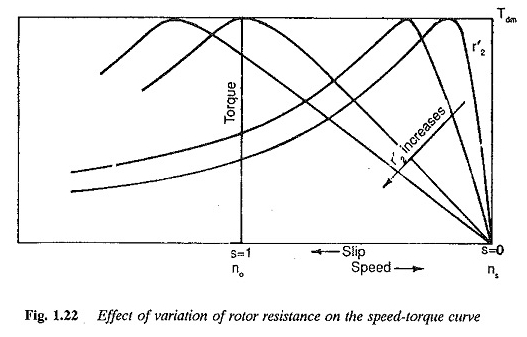
Wenn die Impedanz des Stators vernachlässigt wird, muss der Rotorwiderstand auf einen Wert erhöht werden, der der Reaktanz der Rotorlecks entspricht. Wenn der Rotorwiderstand über diesen Wert hinaus ansteigt, nimmt das Startdrehmoment ab.
Das Ausfalldrehmoment tritt in Objektträgern auf, die größer als eins (im Bremsbereich). Der Startstrom nimmt ab und der Startaktfaktor ist besser für erhöhte Werte des Rotorwiderstands.
Die Verschiebungsänderungen in vollem Lasten und Erleichterung der Geschwindigkeitsregelung in einem begrenzten Bereich, wenn der Rotorwiderstand variiert wird. Die Effizienz wird jedoch aufgrund eines Anstiegs der Verluste auf hohe Rotorwiderstände verändert. Die Erwärmung des Rotors ist in einem intrinsisch hohen Widerstandsrotor vorhanden.
Kurz gesagt, die Leistung der Motorstart wird mit großen Rotorwiderständen verbessert, während die Rennleistung verändert wird.
Um die Vorteile eines hohen Widerstands gegen den Rotor bei Start -up zu erhalten, wird im Rotorkreis des Treiberinduktionsmotors der Wunde ein zusätzlicher Widerstand angeschlossen und langsam geschnitten, wenn sich der Rotor beschleunigt. Bei nominaler Geschwindigkeit arbeitet der Motor nach seinem natürlichen Merkmal. Die Verbindungen sind in Abbildung 1.23 (b) dargestellt.
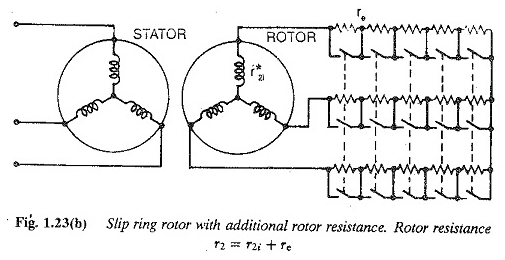
Der Anschluss zusätzlicher Widerstand ist jedoch in Eichhörnchen -Käfigmotoren nicht möglich. Es werden Konstruktionen von speziellen Rotoren wie Doppelkäfigrotoren und tiefem Balken verwendet.
Beim Start -up verteilt sich der Strom aufgrund der hohen Rotorfrequenz im Außenkäfig eines Doppelkäfig -Rutors oder im oberen Teil der Stange im Fall eines tiefen Stangenrotors. Die Wirkung eines hohen Widerstands wird somit erreicht.
Mit zunehmendem Motor nimmt die Rotorfrequenz ab und der Strom wird in den beiden Käfigen des Doppelkäfigrotors oder im vollen Stab im Rotor des tiefen Balkens verteilt. Der effektive Widerstand ist gering und die Rennleistung wird verbessert. Die typischen Drehmomentdrehzahlkurven sind in Abbildung 1.23 dargestellt.
Auswirkung der Spannungsvariation im Induktionsmotor:
Die Schlüsselgeschwindigkeitsmerkmale einer Induktionsmotor kann durch den Effekt der Spannungsvariation in der Induktionsmotor geändert werden. Die typischen Merkmale der Geschwindigkeit des Drehmoments des Induktionsmotors, wenn sie aus variabler Spannung bei der Nennfrequenz bereitgestellt werden, sind in Abbildung 1.24 (a) angegeben.
Sie basieren auf der Tatsache, dass das Drehmoment des Induktionsmotors (mit einer bestimmten Folie) wie das Quadrat der Spannung variiert. Die Verschiebung für maximales Drehmoment ist unabhängig von der Spannung. Das Volllastdrehmoment tritt bei unterschiedlichen Verschiebungen auf, wenn die Spannung variiert wird.
Dies macht die Geschwindigkeitskontrolle der Induktionsmotoren durch Variation der Versorgungsspannung bei einem begrenzten Bereich möglich. Die Motordrehmomentkapazität nimmt jedoch aufgrund der Verringerung des Luftraumstroms bei niedriger Spannung ab. Der Leistungsfaktor nimmt ab.
Der Motor zieht schwere Strömungen an, um ein mit niedrigem Volt mit Drehmoment mit geringer Spannung zu entwickeln. Der an unterschiedliche Spannungen gezogene Strom ist in Abbildung 1.24 (a) sowie das Drehmoment bei einem Nennstrom bei verschiedenen Spannungen dargestellt.
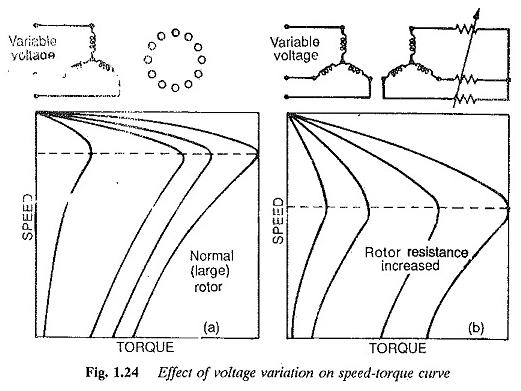
Abbildung 1.24 (b) zeigt die Vorteile des hohen Widerstands im Rotor, wenn die angelegte Spannung variiert wird, um das Geschwindigkeitsgeschwindigkeitsmerkmal zu modifizieren.
Zusätzlich zur Erhöhung des Geschwindigkeitsregelungsbereichs kann der vom niedrigen Volt -Motor gezogene Strom durch eine angemessene Auswahl des Rotorwiderstandes begrenzt werden.
Pole Änderung des Induktionsmotors:
Die Geschwindigkeitsgeschwindigkeitskurve eines Induktionsmotors kann durch eine wieder verbundene Verstärkungswicklung geändert werden, um unterschiedliche Pole zu ergeben. Wenn sich die Anzahl der Pole in der Induktionsmotor ändert, gilt dies auch für die Geschwindigkeit.
Die Art der Verbindung entscheidet die Last, die zu einem konstanten Drehmoment oder einer konstanten Leistung autorisiert ist. Diese Methode zur Änderung des Posts in der Induktionsmotor ist für Eichhörnchen -Käfigmotoren geeignet, da ihre Rotoren eine bestimmte Anzahl von Polen annehmen können. Es ist keine Wiederverbindung der Rotorwicklung erforderlich.
Wenn andererseits ein Gleitringrotor verwendet wird, muss er wieder mit verschiedenen Stangensätzen verbunden werden. Die resultierende Nachwicklung wird zur Wiederverbindung verwendet. Der Spulenschritt ändert sich effektiv bei unterschiedlichen Geschwindigkeiten.
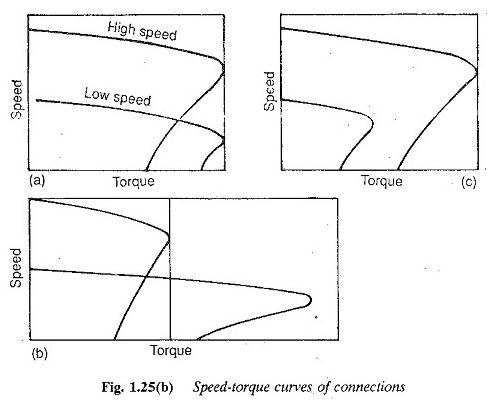
Jede Phase hat eine Wicklung, die in Hälften unterteilt ist. Diese sind in Reihe oder parallel angeschlossen, um die Anzahl der Pole effektiv zu ändern. Die möglichen Kombinationen sind in Abbildung 1.25 dargestellt.
Die Konstante Leistung Funktionen erfolgt durch die Serie-Delta-Verbindung für hohe Geschwindigkeiten und den parallelen Stern für niedrige Geschwindigkeiten. Bei hohen Geschwindigkeiten wird ein schwaches Drehmoment entwickelt, so dass die Leistung konstant ist. Die Spannung pro Hälfte beträgt v / 2 im Hochgeschwindigkeitsanschluss und v / √3 bei niedriger Geschwindigkeit.
Parallele Verbindungen und Serienserien für hohe Geschwindigkeiten für hohe und niedrige Geschwindigkeiten
Induktionsmotor -Schieber -Stromwiederherstellung:
Die Modifikation des Merkmals von Geschwindigkeitsleitungen unter Verwendung eines variablen Rotorwiderstands zeigt den Hauptnachteil der schlechten Effizienz, was sie nicht profitabel macht. Der Betrieb bei niedriger Geschwindigkeit ist aufgrund der Überhitzung des Rotors nicht möglich.
Diese niedrigen Geschwindigkeiten können sehr effektiv mit angemessener Effizienz mithilfe von Ruting -Energie -Wiederherstellungsmustern erfolgen. Die Gleitleistung, die im externen Widerstand im Rotorkreis verschwendet wird, wird in den Sektor dieser Diagramme zurückgegeben.
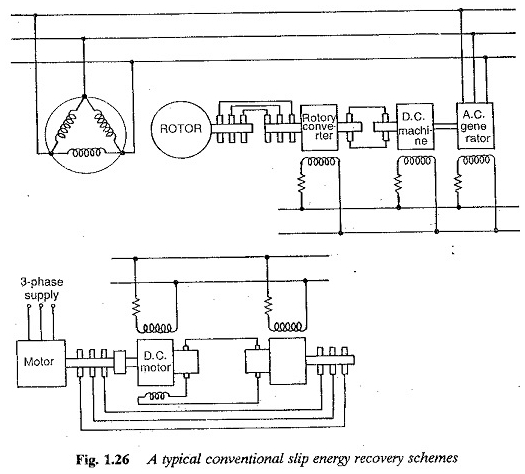
Herkömmliche Methoden zur Wiederherstellung von Schiebern verwenden rotierende Maschinen wie Rotationswandler, Lichtmaschinen, DC -Maschinen usw. im Rotorschaltungsschaltungskreis, um die Stromversorgung in die Stromfrequenz der Stromfrequenz in die Stromversorgung umzuwandeln. Bestimmte typische konventionelle Muster, die als Scherbius- und Kramer -Kontrollen bezeichnet werden, sind in Abbildung 1.26 dargestellt.

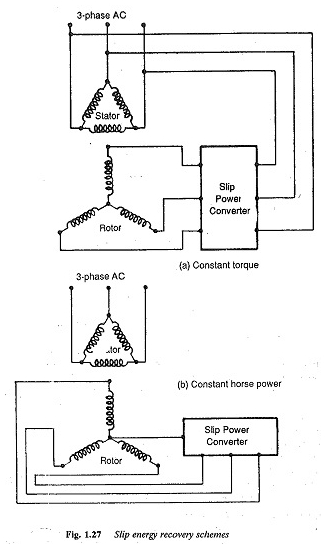
Wenn diese Methoden angewendet werden, muss der Motor / NO nicht bedient werden, um sowohl konstantes Drehmoment als auch konstante Stromladungen zu trainieren. Diese sind in Abbildung 1.27 (a) und (b) im Prinzip dargestellt. In der Figur.
1.27 (a) Die Leistung des Rotors bei der Schiebfrequenz wird mittels eines Schieberwandlers in die Linienfrequenz umgewandelt. Wenn der Schiebendraftwandler den Stromfluss in beide Richtungen ermöglicht, kann der Motor sowohl bei Sub- als auch bei Supersynchrongeschwindigkeiten verwendet werden.
Dieses Schema wird verwendet, um konstante Drehmomentlasten zu verursachen. Beim synchronen Betrieb wird die Gleitleistung in die Leitungsfrequenz umgewandelt und an den Sektor geliefert. Beim Supersynchron -Betrieb wird die Leistung an der Leitungsfrequenz in Schiebleistung umgewandelt und dem Motor geliefert.
Ein wichtiges Merkmal dieser Modifikation ist, dass das entwickelte Drehmoment unter der Hypothese eines konstanten Flusses im Motor proportional zum Rotorstrom ist. Die Geschwindigkeitsdrehmomentkurven für dieses Diagramm sind in Abbildung 1.28 (a) dargestellt.
Die gewünschte Modifikation der in Abbildung 1.28 (a) gezeigten Drehmomentgeschwindigkeitskurven wird durch Steuerung des Schieberschaltwanders so erhalten, dass der Motorspannung zu einer bestimmten Verschiebung entspricht. Die Konvertersteuerung wird durch den Parameter A dargestellt.
Die Erhöhung der Spannung auf der Rotorseite des Schiebemeistungswandlers führt zu einem Geschwindigkeitsabfall. In Mai fixiert es für Vakuumbedingungen, die mit einem leeren Wert befestigt sind, hat der Motor eine Merkmale für die Geschwindigkeitsgeschwindigkeit.
Beispielsweise kann ein ein Schießwinkel des Konverters auf der Linienseite bei statischen Schieberschemata sein.
Das dargestellte Diagramm in Abbildung 1.27 (b) verwendet die Gleitleistung, um eine Hilfsmaschine zu fahren. In diesem Fall ist der Schiebendraftwandler mit dem Rotor des Induktionsmotors gekoppelt und zeichnet die Leistung. Auch hier sind Sub- und Supersynchrongeschwindigkeiten möglich.
Im synchronen Betrieb wandelt die Hilfsmaschine die Gleitleistung in mechanische Leistung um. Beim Supersynchron -Betrieb wird zusätzliche Leistung mit Rotorwicklungen durch den Gleitwandler der Hilfsmaschine angetrieben. Die Verbindung behält die konstante Leistung bei.
Die Drehmomentdrehzahlmerkmale der Induktionsmotor sind in Abbildung 1.28 (b) dargestellt. Auch hier ist A ein Parameter des ausgewählten Schieberwandlers, um die Geschwindigkeitskontrolle wie oben beschrieben zu verursachen, wenn er auf eine bestimmte Weise variiert wird. Die Gleitkraft wird von der Hauptmotorenwelle verwaltet. Das Drehmoment nimmt mit einer Geschwindigkeitssteigerung ab.
Mit der Verfügbarkeit von Thyristor-Leistungswandlern werden statische Wandlerkaskaden (Gleichrichterwechselrichter) in Rotorschaltungen der Induktionsmotoren verwendet, um die oben genannten Modifikationen an das Merkmal der Drehmomentgeschwindigkeit zu erhalten. Die Diagramme sind in Abbildung 1.29 (a) dargestellt.
Die Gleitleistung wird behoben und an den gemeinsamen Linienwandler geliefert, der die Leistung in Richtung des Sektors füttert. Die Geschwindigkeitskurven, die durch die Variation im Wechselrichterwinkel des Schießens erhalten wurden, sind in Abbildung 1.29 (6) dargestellt. Ein Cycloconverteur kann auch in der Rotorschaltung verwendet werden.
Spannungsinjektion im Rotorkreis:
Das Merkmal des Drehmoments eines Induktionsmotors kann modifiziert werden, indem eine Spannung in den Rotorkreis (Wundrotor) eines Induktionsmotors injiziert wird. Die injizierte Spannung sollte die Schlupffrequenz erfolgen.
Wenn die injizierte Spannung der Spannung des Rotors entgegengesetzt ist, nimmt der effektive Rotorstrom ab, der das Drehmoment sofort beeinflusst. Das reduzierte Paar kann die Ladung nicht fahren.
Die Rotorgeschwindigkeit nimmt zu einem Wert ab, der eine ausreichende induzierte Rotorspannung und damit einen Rotorstrom sorgt, um die Last zu verursachen. Wenn andererseits die injizierte Spannung der Spannung des Rotors hilft, führt sie zu einer Erhöhung des Rotorstroms.
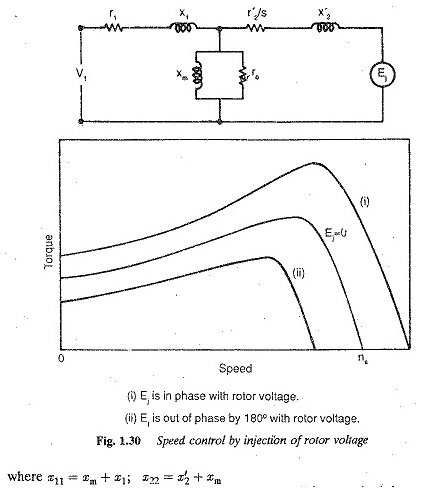
Die Zunahme des entwickelten Drehmoments beschleunigt den Rotor mit einer Geschwindigkeit, mit der ein ausreichender Rotorstrom fließt, um die Last zu verursachen. Die Geschwindigkeitsdrehmomentkurven für beide Fälle sind in Abbildung 1.30 dargestellt.
Zum Vergleich wird auch die Drehmomentdrehzahlkurve eines kurzen Rotors in Schaltkreis mit einer injizierten Spannung mit Null angegeben. Laut Abbildungen kann abgeleitet werden, dass es möglich ist, die Motordrehmomentkapazität zu ändern, indem die injizierte Spannung geändert wird.
Wenn sich die injizierte Spannung widersetzt, nimmt die Drehmomentkapazität des Rotorstroms ab, während sie zunimmt, wenn die injizierte Spannung die Rotorspannung erleichtert.
Variation der Leistungsfrequenz:
Die Geschwindigkeit eines synchronen Magnetfelds hängt von der Leistungsfrequenz ab. Folglich kann durch Variieren der Leistungsfrequenz die Synchrongeschwindigkeit und damit die Drehzahl des Rotors variiert werden.
Um eine Sättigung aufgrund einer Erhöhung des niedrigen Frequenzflusss zu vermeiden, wird auch die auf den Motor angelegte Spannung variiert, so dass der Durchfluss bei allen Frequenzen bei ihrem Nennwert konstant bleibt.
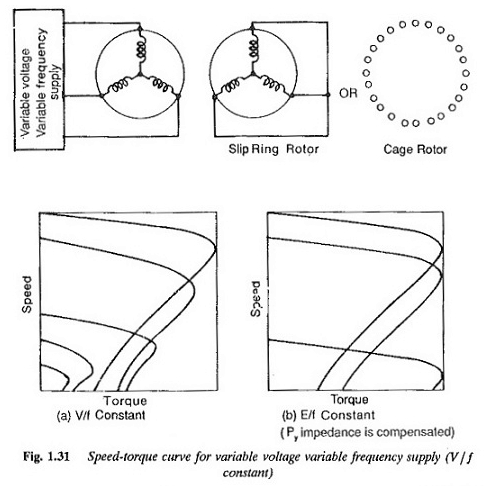
Um dies zu erreichen, besteht eine einfache Methode darin, sowohl die Spannung als auch die Frequenz so zu variieren, so dass V / F konstant ist. Die Drehmomentgeschwindigkeitskurven mit V / F -Konstante sind in Abbildung 1.31 dargestellt.
Es gibt eine Erschöpfung mit niedriger Frequenzdrehmoment. Der Motor hat die Drehmomentkapazität und die Überlastkapazität verringert. Dies ist auf die dominierende Wirkung des Widerstands des Stators auf niedrige Frequenzen zurückzuführen.


Der Widerstandsabfall wird im Vergleich zur angelegten Spannung angenehm. Dies verursacht die Erschöpfung der Fluss, deren Konsistenz nicht bei niedriger Frequenz gehalten werden kann. Das mit V / F -Konstante entwickelte Paar ist
Um das gleiche Paar und die gleiche Überlastkapazität bei allen Frequenzen zu haben, muss der Sturz des Stators (Widerstand) kompensiert werden, um E / F konstant zu halten. V / f ist nicht mehr konstant, da es mit abnimmt, wenn die Frequenz abnimmt. Das in diesem Fall entwickelte Paar wird von gegeben

Oder
L ‚2σ ist die Induktivität von Rotorlecks.
Die Drehmomentdrehzahlkurven für E / F -Konstante sind in Abbildung 1.31 (b) dargestellt.
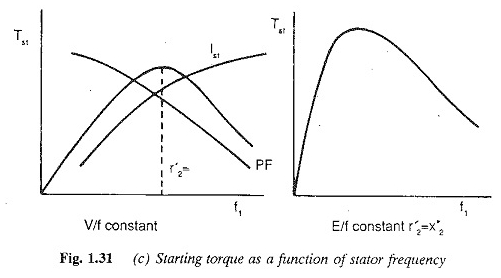
Bei der V / F (konstanten) Kontrolle steigt das Startdrehmoment mit einer Abnahme der Frequenz bis zu einem bestimmten Wert. Unter diesem Frequenzwert nimmt das Startdrehmoment ab. Dieser Effekt wird als ähnlich angesehen wie der, der durch Modifizierung der Reaktanz von Rotorlecks durchgeführt wird.
Wenn die Frequenz abnimmt, ist die Reaktanz von Rotorlecks. Wenn die Frequenz abnimmt, nimmt die Reaktanz der Rotorlecks ab. In der Tat erfolgt eine Erhöhung des Rotors, des Widerstands im Vergleich zur Reaktanz von Lecks.
Folglich steigt das Startdrehmoment auf eine bestimmte Frequenz, wobei die Reaktanz von Rotorlecks dem Widerstand gegen den Rotor entspricht.
Wenn die Frequenz verringert ist, nimmt das Startdrehmoment ab. Die Variation des Startdrehmoments mit der Frequenz ist in Abbildung 1.31 (c) dargestellt. Mit einer konstanten E / F -Kontrolle nimmt das Startdrehmoment jedoch zu, wenn die Frequenz zu einem von den Parametern entschiedenen Wert abnimmt.
Wenn die Frequenz noch abnahm, nimmt das Startdrehmoment ab. Die Beschleunigung kann aus einem konstanten Drehmoment und einem Verstärkungsstrom erhalten werden, indem die Frequenz des Stators von einem niedrigen Wert variiert, indem E / F konstant bleibt.
Die Drehmomentdrehzahleigenschaften der Induktionsmotor werden durch Erhöhen der Versorgungsfrequenz über den Nennwert übertragen. Der Motorfluss nimmt ab, da die Spannung nicht über den Nominalwert hinaus erhöht werden kann. Der Motor arbeitet im Fluss des Flusses.
Die Drehmomentgeschwindigkeitskurven sind bei allen Frequenzen parallel zueinander, sie erstrecken sich auf den zweiten Quadranten und zeigen, dass die Regeneration möglich ist.
Der Start des Motors kann einfach mit einer variablen Spannung, einer variablen Frequenzleistung, erreicht werden. Dies verringert den Startstrom und verleiht ein paar vernünftige Beschleunigungen eines guten Leistungsfaktors auch bei Käfigmotoren mit geringem Widerstand.
Induktionsmotor -Geschwindigkeitsregelung:
Ein Dreiphasen -Induktion -Motor ist im Wesentlichen ein Motor mit konstanter Geschwindigkeit. Es ist nicht möglich, eine reibungslose Geschwindigkeitskontrolle des Motors auf einem weiten Bereich zu erhalten, wenn sie aus einer konstanten Spannung mit dreiphasigen konstanter Frequenzversorgung ausgestellt werden.
Thyristor -Leistungswandler haben die variable Frequenz und die variable Spannungsversorgungen ermöglicht. Diese werden verwendet, um eine glatte Geschwindigkeitskontrolle von Induktionsmotoren in einem weiten Bereich zu erhalten.
Die Methoden zur Änderung der Eigenschaften der Geschwindigkeit des Drehmoments der diskutierten Induktionsmotor sind auch mehr oder weniger die Kontrollmethoden. Thyristor -Leistungskonverter werden beispielsweise häufig zur Übernahme von Geschwindigkeitsregelmethoden verwendet
Ein Hubschrauber zur Steuerung des Rotorwiderstandes, der Wechselspannungsregler, um die Versorgungsspannung zu variieren, statische Wandlerkaskaden für die Wiederherstellung von Schiebernenergie usw.