Induktionsmotor -Geschwindigkeitsregelung:
Die Kontrolle ohne Schritt in der Geschwindigkeit von Induktionsmotoren kann nicht so effektiv und bei geringen Kosten wie bei DC -Motoren durchgeführt werden. Verschiedene Methoden zur Steuerung des Induktionsmotors können unter Berücksichtigung der Geschwindigkeitsgleichung betrachtet werden
![]()
Aus dieser Gleichung erkennen wir, dass es zwei grundlegende Methoden zur Geschwindigkeitsregelung der Einführung der Einführung von Einführung gibt, nämlich
- Steuern Sie den Schlupf für eine feste Synchrongeschwindigkeit und
- Synchrongeschwindigkeitskontrolle.
Aus

Es gibt zwei Möglichkeiten, die Synchrongeschwindigkeit zu steuern – die Steuerung der Steuerfrequenz- und Statorstangen. Diese letzte Methode gibt eine Schrittesteuerung an, da die Pole in mehreren von zwei geändert werden können. Die Änderung des Postens wird nur in einem Eichhörnchen -Käfigmotor und auch für zwei Stufen durchgeführt.
Spannungsregelung:
Es handelt sich um eine Schiebeteuermethode mit einer variablen konstanten Frequenzspannung, die dem Motorstatator zur Verfügung gestellt wird. Offensichtlich sollte die Spannung nur unter dem nominalen Wert reduziert werden.
Bei einem Motor, der bei einer Volllastverschiebung arbeitet, folgt die Verschiebung, wenn die Verschiebung für ein konstantes Lastdrehmoment verdoppelt werden muss, aus den Gleichungen (9.34) und (9.35), dass die Spannung um den Faktor 1 / √2 reduziert werden muss und dass der entsprechende Strom (I’2) auf √2 des vollständigen Lastwerts steigt.
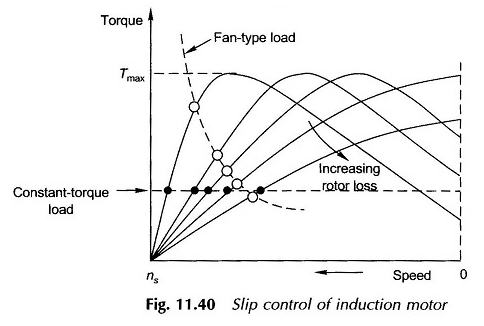
Der Motor neigt daher zu überhitzt. Die Methode ist daher nicht für die Geschwindigkeitsregelung geeignet. Es hat eine begrenzte Verwendung für Motoren, was zu Lasten vom Typ Lüfter führt, deren Drehmomentbedarf proportional zur Geschwindigkeitsgeschwindigkeit ist (siehe Abb. 11.40).
Dies ist eine häufig verwendete Methode für Deckenventilatoren, die von Ein -Phasen -Induktionsmotoren ausgebildet sind und eine große Stoppimpedanz aufweisen, die den vom Stator gezogenen Strom begrenzt.
Rotorwiderstandskontrolle:
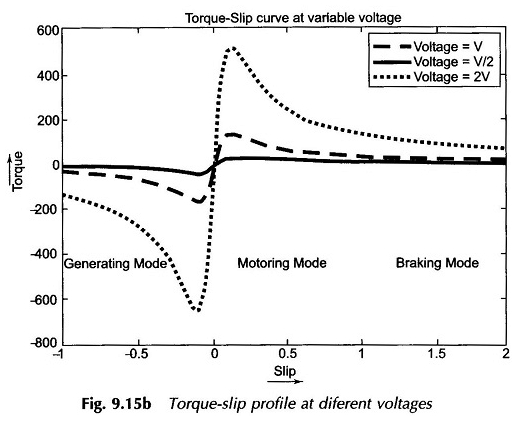
Wie der Name schon sagt, ist diese Art der Geschwindigkeitskontrolle nur für Ring -Induktionsmotoren möglich. Wenn Sie sich auf Abbildung 9.15 beziehen, wird leicht ersichtlich, dass der Motorverschiebung (Geschwindigkeitsabfälle) für ein festes Lastdrehmoment erhöht wird, wenn der Rotorwiderstand zunimmt.
Der Statorstrom variiert in begrenztem Maße, da der Effekt von Änderungen vom Widerstand auf Gleit- und Rotor -Absaugen (in Bezug auf Gleichung (9.34)) für kleine Gleitwerte tendenziell abgebrochen wird. Die Eingangsleistung nimmt jedoch zu. Dies sorgt für die verlorene Leistung bei zusätzlichem Rotorwiderstand.
Die Effizienz des Betriebsmotors nimmt natürlich stark ab. Diese Geschwindigkeitskontrollmethode als solche wird daher für einen schmalen Geschwindigkeitsbereich und im Allgemeinen für einen kurzfristigen Betrieb übernommen.

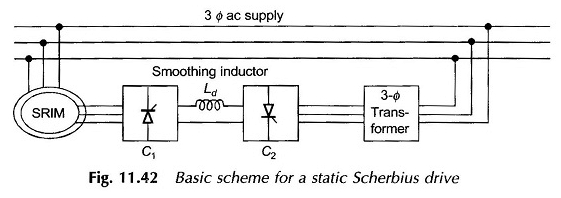
Die Wirksamkeit dieser Art von Geschwindigkeitsregelungsdiagramm kann verbessert werden, indem die Leistung des Rotors mechanisch an den Rotorbaum oder elektrisch an den Sektor zurückgegeben wird. Das erste Diagramm kann durch einen Gleichrichter und einen kontinuierlichen Strom -Engine -Motor mit dem Rotorbaum implementiert werden.
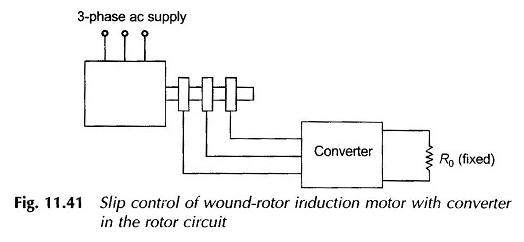
Das zweite Diagramm erfordert einen Frequenzwandler, der variable Frequenzleistung in eine feste Frequenz (Stromversorgung) umwandelt, um die elektrische Leistung an den Sektor zu verringern. Diese Muster können von den SCR -Schaltungen ausgelegt werden (siehe Abbildungen 11.41 und 11.42).
Es ist möglich, die übersynchronen Geschwindigkeiten zu erreichen, indem er mithilfe einer einstellbaren Frequenzquelle mit der entsprechenden Frequenz im Rotor Strom injiziert.
Wir können sehen, dass es genau das Gegenteil ist, dem Rotor einen Widerstand hinzuzufügen, in dem die Leistung aus dem Rotor entnommen wird (und in einem externen Widerstand verschwendet wird).
Eine breite Palette von Geschwindigkeitsregelung oben und unten ist synchron ermöglicht, indem Frequenzumwandlungsgeräte in den Rotorschaltungskreis eingefügt werden.
Frequenzkontrolle:
Die Synchroninduktionsmotordrehzahl kann in einem Schritt ohne weiten Bereich gesteuert werden, indem die Versorgungsfrequenz geändert wird. Nach der Gleichung. (9.1) Der Luftmann, der durch Stange resultiert, ist gegeben durch


Um die Sättigung von Stator- und Rotorkern zu vermeiden, die zu einem hohen Anstieg des Magnetisierungsstroms führen, muss der φR -Fluss konstant gehalten werden, da F variiert wird. Um dies zu erreichen, folgt es aus der Gleichung.
(9.81), dass V, wenn f variiert ist, auch so variiert werden muss, dass (v / f) konstant bleibt. Die variable Stromversorgung (v, f) der konstanten Leistung (V, f) kann durch das Layout der konverter-maßstabsabteilung organisiert werden, die in Abbildung 9.49 (a) schematisch dargestellt wird, die SCR-Schaltungen verwendet. Abbildung 9.49 (b) zeigt ein alternatives Geschwindigkeitskontrollschema unter Verwendung eines Wandlers und eines DC -Motors (Shunt).

Die Hauptattraktion der Verwendung des Induktionsmotors zur Geschwindigkeitsregelung ist die Robustheit, die niedrigen Kosten und die Wartung ohne Wartung im Vergleich zum CC -Motor.
Aufgrund der Kosten des Wechselrichters, der am Steuerungsschema der Induktionsmotorgeschwindigkeit beteiligt ist, ist das kontinuierliche Strom -Motordiagramm wirtschaftlicher.
Das Induktionsmotorschema ist jedoch ein solider Kandidat für die Geschwindigkeitskontrolle und sollte in naher Zukunft mit einer Verbesserung und Verringerung der zusätzlichen CCR -Technologie übernehmen.