Induktionsmotor orientierte Steuerung: Induktionsmotor:
Bei schiebenden kontrollierten Discs unter Verwendung von VSI oder CSI, die in früheren Abschnitten diskutiert werden, werden Statorspannung oder Statorstrom unter Verwendung der Schlupffrequenz gesteuert. Sie werden nur in Amplitude kontrolliert.
Die Kontrolle des Statorstroms unterstützt seine Phasenposition im Vergleich zum Fluss nicht. Die Kontrolle bietet kein zufriedenstellendes dynamisches Verhalten. Es gibt eine oszillatorische Reaktion auf Änderungen der Rotorfrequenz.
Die dynamische Antwort kann unter Verwendung des auf dem Boden des Induktionsmotors orientierten Kontrollprinzips verbessert werden, bei dem der Statorstrom sowohl in der Amplitude als auch in der Phasenposition im Vergleich zum Fluss gesteuert wird.
Bei der Steuerung des Einführungsmotorbodens hat der Statorstrom die Funktion der Bereitstellung von Fluss und Drehmoment.
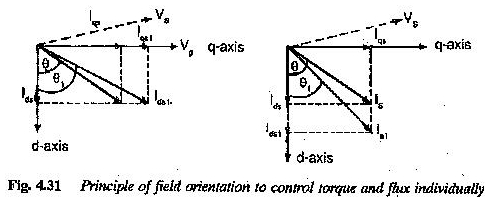
Der Induktionsmotor hat einen Einsatz wie ein Motor von If, wenn die Statorstromkomponenten, nämlich die Durchflusserzeugung und die Drehmomentproduktion, getrennt gesteuert werden (Abb. 4.31).
Dies ist tatsächlich in einem kontinuierlichen Strom Motor der Fall, bei dem das Drehmoment vom Verstärkungsstrom und dem Fluss auf dem Feldstrom abhängt. Es gibt eine Entkopplung zwischen ihnen, aber für die Auswirkungen der Reaktion des Rahmens.
Diese Effekte können durch Ausgleich der Wicklungen beseitigt werden, und es gibt eine perfekte Entkopplung in einem angeregten CC -Motor getrennt. Diese Art der Entkopplung ist bei der Kontrolle von Induktionsmotoren in Versuchung. Das Prinzip wird als Orientierung auf dem Boden oder der Kontrolle des Vektors bezeichnet.
Diese Steuerung verbessert die dynamische Leistung des Lesers bei allen Geschwindigkeiten. Der Statorstrom wird in zwei Komponenten unterteilt, eine entlang der Achse D und die andere entlang der Achse Q.
Die Referenzachsen wurden so ausgewählt, dass der Rotorfluss entlang der direkten Achse vollständig verfügbar ist. Die Quadraturkomponente ist Null.
Somit ist die Komponente des Stroms entlang der Achse D der Komponentenproduzent des Durchflusses und der entlang der Achse Q die Erzeugerkomponente des Drehmoments. Indem wir diese Komponenten unabhängig voneinander variieren, können wir eine unabhängige Kontrolle über den Fluss und die Kontrolle eines Paares haben. Diese sind in Abb.
4.31 (a) und (b). Im ersten Fall wird die Variation des Flusses durch eine variable direkte Achsenkomponente des Stroms angezeigt, während in der zweiten Variation der Komponente der Achse q des Stators dargestellt wird.
Infolgedessen ist die Kontrolle des Statorstroms nicht nur der Variation seiner Größe, sondern auch zu seinem Phasenwinkel entspricht. Die Methode wird daher als Vektorkontrolle bezeichnet.
Die Vektoren kontrollieren Techniken, die zur Aufrechterhaltung des konstanten Luftraumflusses verwendet werden, schlechte dynamische Eigenschaften des Trainings, da das Drehmoment der Gleitfrequenz mit einer Verzögerung folgt. Es wurden Techniken entwickelt, um den Fluss von Rotor konstant zu halten.
Bei diesen Methoden folgt das Paar unverzüglich und verbessert so das dynamische Verhalten. Eine Dynamik von hoher Qualität ist für die auf dem Boden des als Aktuator verwendeten Einführungsmotors ausgerichteten Steuerung erforderlich.
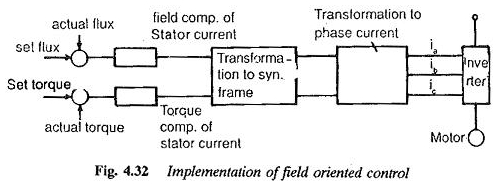
Abbildung 4.32 zeigt die Umsetzung des Orientierungsprinzips vor Ort. Der reale Wert des Rotorflusss wird mit dem Referenzwert verglichen und der so erhaltene Fehler wird verwendet, um die Direktachsekomponente des Stroms zu steuern.
Normalerweise wird diese Komponente konstant gehalten, so dass der Rotorstrom konstant ist. Die Komponente der Quadratur -Achse wird unter Verwendung des Fehlersignals gesteuert, das aus dem Vergleich des realen Drehmoments und des Referenzdrehmoments erhalten wurde. Die Komponenten befinden sich synchron im Rotationsgerüst.
Folglich erfordert die Entkopplung zwischen den Komponenten der Produktion von Strömungen und der Produktion des Drehmoments der Verstärkung ein System von Referenzkoordinaten und die Transformation der Größen in diesem Referenzrahmen und schließlich im Rahmen des Stators,
Bei dieser Kontrolle, die ein sehr gutes dynamisches Verhalten ohne Übergangspaar -Schlaganfall bietet, ist ein sekundärer Fluss erforderlich, der auf zwei Arten verfügbar gemacht werden kann:
1. direkt unter Verwendung von Durchflusserkennungsspulen.
2. Indirekte Schätzung des Flusses unter Verwendung eines Maschinenmodells unter Verwendung leicht messbarer Klemmenmengen wie Spannungen und Ströme.
Die erste Methode unter Verwendung direkter Messung liefert gute Ergebnisse und ist wahrscheinlich die genaueste verfügbare Steuermethode. Die Messung wird mittels Forschungsspulen, Hall -Sonden oder einer anderen Technik zur Messung des Flusses durchgeführt.
Der gemessene Fluss wird verwendet, um die gereinigte Entkopplung zwischen den Komponenten der Drehmomentproduktion und der Produktion des Statorstromstroms zu machen. Die Methode ist im Wesentlichen unempfindlich gegenüber Variationen der Parameter. Der Käfigmotor verliert jedoch seine Robustheit und die Einfachheit der Konstruktion.
Wenn wir versuchen, die Robustheit und die Einfachheit des Motors zu halten, wird der Durchfluss mit der zweiten Methode erhalten. Der Rotorstrom wird aus dem Statorspannungsvektor, dem Stromvektor und der Rotorgeschwindigkeit geschätzt. Dieser geschätzte Fluss wird mit dem Drehmomentkontroller gefüttert.
Dieser Ansatz ist empfindlich gegenüber Fehlern in Parametern. Rotorwiderstand, Lecks und andere Parameter müssen mit Genauigkeit bestimmt werden, um ein Leistungsniveau zu erreichen, das der direkten Messung entspricht.
Leider werden die in der Berechnung verwendeten Motorparameter aus Vakuumtests bestimmt und stellen die Werte der tatsächlich am Betriebspunkt tatsächlich vorhandenen Parameter dar.
Zusätzlich variieren diese Parameter erheblich mit Sättigung, Temperatur, Frequenz und Amplitude des Stroms. Der sekundäre Flussniveau kann durch die Variation der Parameter geändert werden. Diese Variationen in Parametern verursachen eine fehlerhafte Durchflussregelung, was die dynamische Leistung verschlechtert.
Um Fehler aufgrund der Variation der Parameterwerte (hauptsächlich Rotorwiderstand) zu vermeiden, entweder aufgrund einer falschen Schätzung oder aufgrund der Motorbetriebsbedingungen wurden die Identifizierung oder Anpassung der automatischen Parameter verwendet.
Die Methoden identifizieren die Änderungen in der Leistung aufgrund der Variation der Parameter und korrigieren die Parameter entsprechend.
Der Fehler zwischen dem geschätzten Wert des Durchflusses und dem gewünschten Fluss im Motor wird verwendet, um den einflussreichsten Parameter zu korrigieren, dem Rotorwiderstand oder die Zeitkonstante des Rotors, so dass das Maschinenmodell den erforderlichen Wert des Flusses ohne Fehler angibt.
Eine andere kürzlich diskutierte Methode ist eine Online -Technik, um den genauen Wert des Rotorwiderstands der Einführungsmotor zu ermitteln. Die Identifizierung wird erhalten, indem ein Strom negativer Sequenz injiziert und die negative Sequenzspannung nachgewiesen wird.
Der Wert des Rotorwiderstands wird unter Verwendung von Informationen berechnet. Die auf dem Boden des Induktionsmotors orientierte Steuerung korrigiert den Wert des Widerstands gegen den Rotor, ohne dass ein thermischer Sensor erforderlich ist.
Die Methoden der Rückmeldung von Zustandsbeobachtern werden auch zur Identifizierung von Parametern verwendet.
Mit dem Aufkommen von Mikroprozessoren (μPS) und Mikrocomputern ist es nun möglich, die Probleme mit dem Trainingssystem effektiv zu lösen. Der Durchflussvektor kann sehr leicht bestimmt werden.
Um die Übereinstimmung des Motormodells und die Identifizierung der Rotorparameter durch ein Korrelationsverfahren durchzuführen, können μPs ohne zusätzliche Maßnahme sehr effektiv sein.
Die μPs erleichtern auch die Implementierung komplexer Algorithmen, um Wechselrichteraufnahmen zu erzeugen.
Darüber hinaus ist der Prozess, der in der Feldsteuerung des gesamten Trainingssystems entwickelt wurde, wirtschaftlich machbar, da die bisher verwendete teure Hardware jetzt durch Software ersetzt werden kann.
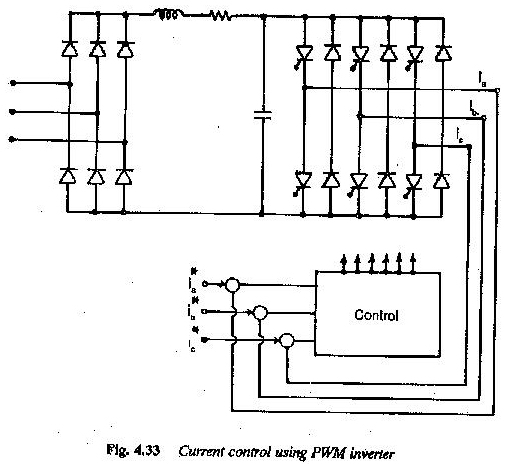
Die Ausrichtung des Feldes kann sehr leicht implementiert werden, wobei CSI eine vom Motor des Induktionsmotors orientierte Steuerung implementiert wird. Da der PWM -Wechselrichter ein gutes dynamisches Verhalten hat, werden diese mit einer Stromregelung an der Seite des Ausgangs verwendet.
Abbildung 4.33 zeigt das Prinzip der Stromregelung unter Verwendung des PWM -Wechselrichters. Dies hat die Vorteile von VSI und CSI.
Induktionsmotorbots in der Art des Fließens des Flusses:
Bei kontinuierlichen Strommotoren werden Geschwindigkeiten über der Grundgeschwindigkeit erhalten, indem der Feldstrom auf eine konstante Integrationsspannung reduziert wird. Das Paar entwickelte sich. Ein konstanter Leistungsmodus kann in diesem Geschwindigkeitsbereich durchgeführt werden und wird als Fluss des Flusses bezeichnet.
Ein ähnliches Verhalten kann bei Induktionsmotoren beobachtet werden. Die Spannung erreicht ihren nominalen Wert für die nominale Frequenz. Bei Frequenzen über diesem Wert wird die Spannung des Spanners konstant gehalten. Die Motordrehzahl steigt im Verhältnis zur Frequenz.
Aufgrund der Frequenzzunahme nimmt der Fluss des Luftraums ab. Das Drehmoment bei einer bestimmten Rotorfrequenz ist umgekehrt proportional zum Quadrat der Statorfrequenz und die entwickelte Leistung ist nicht konstant. Das dynamische Verhalten unter geschwächten Flussbedingungen ist sehr schlecht. Dies kann durch eine variable Gleitfrequenz für ein maximales Drehmoment proportional zur Frequenz verbessert werden.
Ein Motor mit einer aktuellen Stromversorgung hat ein gutes dynamisches Verhalten, wenn der Wechselrichter eine Reservespannung vorliegt.
Sobald ein bestimmter Wert höherer Frequenz erreicht ist, entspricht die hintere EMK des Motors der angelegten Spannung und es gibt keine Reservespannung für die Stromregelung.
Der tatsächliche Wert des Stators und des Rotorflusses läuft von den gewünschten Werten weg und der Leser hat ein dynamisches schlechtes Verhalten. Die Verbesserung der dynamischen Motorleistung im Landschwächungsmodus ist ein Interessesproblem.
Dies kann durch Steuerung der Amplitude des Rotorflusses und damit der hinteren EMF erfolgen, so dass eine ausreichende Spannungsreserve im Geschwindigkeitsbereich über der Grundgeschwindigkeit erhältlich ist. Auch hier können direkte und indirekte Methoden der Durchflussregelung verwendet werden.