Induktionsmotor -Prinzip | Drehmoment -Gleitcharakteristik:
Das Prinzip der Induktionsmotor wurde bisher nicht eingeführt. Betrachten Sie eine zylindrische Rotormaschine mit dem Stator und der Rotorwunde für drei Phasen und die identische Anzahl der Pole, wie in Abbildung 5.40 gezeigt.
Nehmen wir zunächst an, dass sich der Rotor des Rotors im offenen Stromkreis befindet, und lassen Sie den Stator an einen unendlichen Bus (V, F) angeschlossen werden.
Statorströme installierten ein Rotationsmagnetfeld im Luftspalt, der mit einer synchronen Geschwindigkeit arbeitet, die eine EMK in der Wicklung des Stators induziert, die die Spannung des Klemme ausbalanciert, indem angenommen wird, dass der Widerstand des Stators und die Reaktanz der Lecks vernachlässigbar sind.
Das Rotationsfeld induziert auch EMF in der Rotorwicklung, aber kein Rotorstrom zirkuliert, da sich der Rotor im offenen Stromkreis befindet. Die Frequenz von Rotor -EMFs beträgt natürlich f. Da der Rotor MMF F2 = 0 ist, wird kein Paar entwickelt und der Rotor ist weiterhin stationär.
Das Prinzip des Induktionsmotors wirkt einfach als Transformator, bei dem der Stator (primär) und der Rotor (sekundär) EMFs derselben Frequenz aufweisen, die darin eher durch den rotierenden magnetischen Fluss als durch eine Zeit, die zeitlich wie in einem gewöhnlichen Transformator variiert, induziert wird.
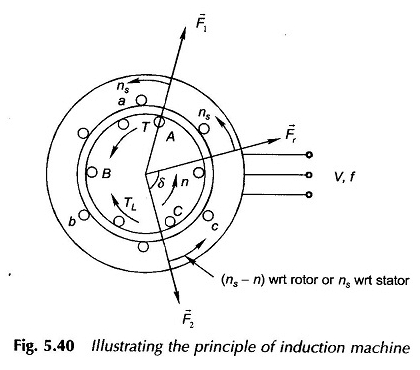 Dass der Rotor jetzt stationär gehalten wird (aus der Rotation blockiert) und die Wicklung des Rotors ist kurzübertragbar. Der Rotor trägt nun Stromströme, die den MMF F2 in der gleichen Richtung und mit der gleichen Geschwindigkeit wie das Statorfeld erstellen. F2 zirkuliert die Reaktionsströme im Stator aus der Bushaltestelle (genau wie in einem gewöhnlichen Transformator), so dass der Fluss / Pol φR des resultierenden Flusses der Strömungsdichte (das Luftwanderung bei synchroner Geschwindigkeit drehen) ein EMF -Stator induziert, um die Spannung des Terminals auszugleichen. Offensichtlich muss φR der gleiche sein wie zu dem, als sich der Rotor im offenen Stromkreis befand. Tatsächlich bleibt φR unabhängig von den Betriebsbedingungen konstant, die durch Last des Motors erzeugt werden. Die Wechselwirkung von φr und f2, die stationär voneinander sind, erzeugt das Paar, das dazu neigt, den Rotor in Richtung FR oder des Feldes des Stators F1 zu bewegen. Die Induktionsmotor ist daher eine Selbststartvorrichtung, die sich von der synchronen Motor unterscheidet.
Dass der Rotor jetzt stationär gehalten wird (aus der Rotation blockiert) und die Wicklung des Rotors ist kurzübertragbar. Der Rotor trägt nun Stromströme, die den MMF F2 in der gleichen Richtung und mit der gleichen Geschwindigkeit wie das Statorfeld erstellen. F2 zirkuliert die Reaktionsströme im Stator aus der Bushaltestelle (genau wie in einem gewöhnlichen Transformator), so dass der Fluss / Pol φR des resultierenden Flusses der Strömungsdichte (das Luftwanderung bei synchroner Geschwindigkeit drehen) ein EMF -Stator induziert, um die Spannung des Terminals auszugleichen. Offensichtlich muss φR der gleiche sein wie zu dem, als sich der Rotor im offenen Stromkreis befand. Tatsächlich bleibt φR unabhängig von den Betriebsbedingungen konstant, die durch Last des Motors erzeugt werden. Die Wechselwirkung von φr und f2, die stationär voneinander sind, erzeugt das Paar, das dazu neigt, den Rotor in Richtung FR oder des Feldes des Stators F1 zu bewegen. Die Induktionsmotor ist daher eine Selbststartvorrichtung, die sich von der synchronen Motor unterscheidet.
Lassen Sie den Kurzschluss des Rotors nun drehen. Es arbeitet in Richtung des Statorfeldes und erhält eine konstante Geschwindigkeit von n. Offensichtlich n 
Schieber -S -Geschwindigkeit (im Vergleich zur Synchrongeschwindigkeit), zu der der Rotor hinter dem Statorfeld rutscht. Die Frequenz von Rotor F2 = SF wird als Schiebfrequenz bezeichnet. Der Gleichung. (5.66) ist die Geschwindigkeit des Rotors
![]()
Die Entwurfsfrequenzströme in der Rotorwicklung verursachen ein Rotorfeld des Rotors in Bezug auf den Rotor in die gleiche Richtung wie das Feld des Stators bei einer Geschwindigkeit von

Da der Rotor mit einer Geschwindigkeit n und dem Rotorfeld in (ns – n) im Vergleich zum Rotor in derselben Richtung funktioniert
![]()
Das heißt, das gleiche wie das Feld des Stators. Somit ist das F2 -Reaktionsfeld des Rotors im Vergleich zum Feld des Stators F1 oder des resultierenden FR -Feldes (mit φR -Fluss durch Pol) immer stationär. Da der Rotor MMF F2 proportional zum Strom des Rotors I2 ist und dass der Fluss / der entstehende Pole φR durch die an den Betriebsbedingungen unabhängige Klemmenspannung fixiert ist, ist das Drehmoment des Induktionsmotors durch (siehe Gleichung (5.58))))))))))))))))))))))))))))))))
![]()
Wir beobachten hier, dass das Drehmoment von der Induktionsmotor mit einer anderen mechanischen Geschwindigkeit als Synchron erzeugt wird. Ein solches Paar heißt asynchrones Paar.
Der Winkel δ, durch den F2 bei FR zu spät kommt, muss das resultierende MMF bekannt sein. Bevor Sie δ bestimmen, sollte beachtet werden, dass der Kurzschluss der Rotorwicklung gleichbedeutend mit dem Kurzschluss alle Treiber einer einzeln Wicklung entspricht.
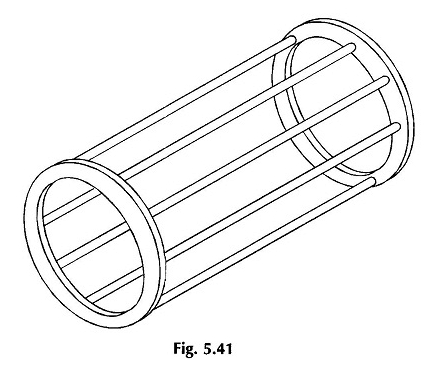
Folglich sollte der Rotor nicht unbedingt ordnungsgemäß aufgerollt werden. Es kann gebaut werden, um Stäbe in Rotor- und Kurzschlussleisten durchzuführen, indem Endringe auf jeder Seite des Rotors hergestellt werden.
Ein solcher Rotor wird der Rotor des Eichhörnchen-Cage genannt; Der leitende Käfig ist in Abbildung 5.41 getrennt dargestellt. Der Rotor des Eichhörnchen-Cage hat eine billige und robuste Konstruktion und wird in einer großen Mehrheit der Einführungsmotorenanwendungen eingesetzt.
Das Prinzip der Induktionsmotor mit einem ordnungsgemäß gerollten Rotor wird als Wundrotor -Induktionsmotor bezeichnet und mit drei Gleitringen geliefert, die die Installation zur Verfügung stellen, um die Rotorwicklung einen externen Widerstand zu erweitern, bevor sie diese beseitigt. Diese Motoren werden in Ladungssituationen verwendet.
Normalerweise beträgt die volle Ladung eines Induktionsmotors des Eichhörnchens 3 bis 10%klein. Folglich ist die Impedanz des Rotors hauptsächlich widerstandsfähig, wobei die Reaktanz der Anpassungen des Rotors proportional zu f2 = sf vernachlässigbar ist. Darüber hinaus ist die durch den Rotor induzierte EMF proportional zum Gleiten des Rotors, da φR fixiert ist und sich im Vergleich zum Rotor mit Geschwindigkeit ns – n = SNS dreht.
Infolgedessen steht der Rotorstrom fast mit der Rotor -EMF und proportional zum Gleiten des Rotors. Diese Schlussfolgerung würde offensichtlich auch für einzelne Rotortreiber gelten.
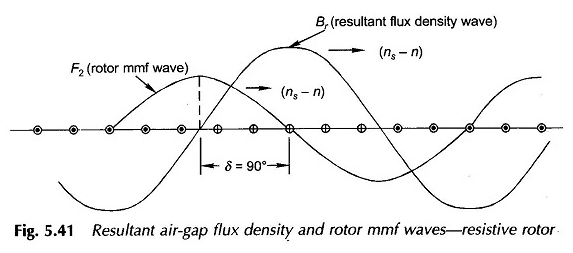
Abbildung 5.42 zeigt die ansässige resistente Bürstenströmungsdichtewelle vor Rotortreibern bei Geschwindigkeit (ns – n) = SNS in einem entwickelten Diagramm.
Die in kurzkreisigen Rotortreiber induzierten Ströme sind verteilte Sinus-Verteilungsbewegungen mit Geschwindigkeit (NS-N) im Vergleich zum Rotor im Synchronismus mit dem BR. Mehr, weil Rotorfahrer zusammengefasst werden sollen, das heißt, das heißt
Die Strömungen in ihnen stehen im Einklang mit ihren jeweiligen EMFs, die Verteilung des Rotorstroms erfolgt in der Raumphase mit BR-Wave. Die Verteilung des sinusförmigen Rotorstroms erzeugt eine rotors sinusförmige F2 -Rotorwelle, die 90 ° hinter der Verteilung des Rotorstroms oder 90 ° hinter der Bruttowelle liegt.
Es wird daher der Schluss gezogen, dass für kleine Gleitwerte der Winkel δ im Induktionsmotor 90 ° beträgt. Also,

Da der EMF -Rotor linear proportional zum Schlupf ist, ist der Rotorstrom auch hauptsächlich ein Rotor -Widerstand zu kleinen Gleitwerten. Infolgedessen ist das im Induktionsmotor entwickelte Drehmoment eine zunehmend lineare Funktion der Verschiebung für einen kleinen Gleitwert, der für S = 0 Null ist, dh bei einer synchronen Geschwindigkeit.
Wenn die Verschiebung weiter zunimmt, kann die Reaktanz von Rotorlecks nicht mehr übersehen werden. Sein Schlupfwert lautet SX2, wobei x2 die Reaktanz von Rotorlecks nach Phase bei der Frequenz F ist, dh wenn sich der Rotor an einem Stillpunkt befindet. Der Rotorstrom bleibt jetzt hinter der EMF induziert

wobei R2 Widerstand gegen Rotor pro Phase ist.
Da die Ströme in Rotortreibern die durch den Winkel θ induzierte EMF ziehen, bewegt sich die Verteilung des Fahrers des Rotors und damit der Rotor MMF F2 in Abbildung 5.40 nach links um einen Winkel θ, so dass
![]()
Dies bedeutet sin Δ <1. Da die Rotorimpedanz mit S zunimmt, ist der Rotorstrom nicht proportional zur Verschiebung. Diese beiden Faktoren verursachen den Durchgang des Motordrehmoments durch einen maximalen Wert und nehmen dann allmählich ab, da S ständig erhöht wird.
Die Art des vollständigen Merkmals der Drehmomentverschiebung im Induktionsmotor ist in Abbildung 5.43 dargestellt. Das maximale Drehmoment wird als Bruchdrehmoment bezeichnet. Der Motor würde sich ausruhen, wenn er über einen kurzen Zeitraum hinaus geladen würde, wobei eine Drehmomentlast größer als der Wert des Fehlers ist.
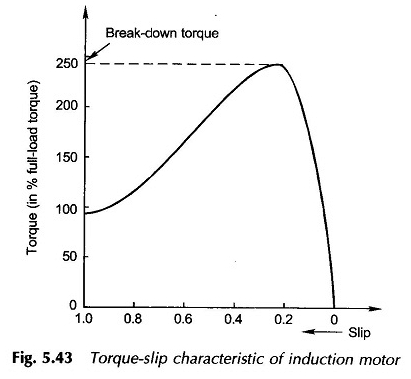
Wie bereits erwähnt, beträgt das Gleiten eines Induktionsmotors 3 bis 10% bei Volllast. Infolgedessen ist es im Gegensatz zum synchronen Motor, der unabhängig von der Last mit konstanter Geschwindigkeit arbeitet, signifikant ein Antrieb mit konstanter Geschwindigkeit.
Erzeugung der Ergebnisse der Aktion Wenn ein Induktions -Engine -Prinzip mit einer negativen Verschiebung oder bei einer Geschwindigkeit n> ns ausgeführt wird, heißt es bei einer Geschwindigkeit über dem Synchron.