Steuerung des Rotorwiderstands des Induktionsmotors:
Drehmomentdrehzahlkurven zur Steuerung des Rotorwiderstands des Induktionsmotors sind in Abbildung 6.50 angegeben. Während das maximale Drehmoment unabhängig vom Rotorwiderstand ist, ändert sich die Geschwindigkeit, mit der das maximale Drehmoment erzeugt wird, mit Rotorwiderstand. Bei dem gleichen Drehmoment fällt die Geschwindigkeit mit einer Erhöhung der Kontrolle des Widerstands gegen den Rotor des Induktionsmotors.

Der Vorteil der Steuerung des Rotorwiderstands des Induktionsmotors besteht darin, dass die Motordrehmomentkapazität auch bei niedriger Geschwindigkeit unverändert bleibt. Nur eine andere Methode, die diesen Vorteil hat, ist eine variable Frequenzregelung.
Die Kosten für die Steuerung des Rotorwiderstands des Induktionsmotors sind jedoch im Vergleich zur variablen Frequenzregelung sehr niedrig.
Aufgrund der niedrigen Kosten und der hohen Geschwindigkeit erhöhte Drehmomentkapazität wird in Kranichen, Ward Leonard Ilgener -Spielern und andere zeitweilige Lastanwendungen die Kontrolle des Rotorwiderstandes verwendet.
Ein Hauptnachteil ist eine geringe Effizienz aufgrund zusätzlicher Verluste des in der Rotorschaltung verbundenen Widerstands. Da die Verluste hauptsächlich im externen Widerstand stattfinden, entkommen sie dem Motor nicht.
Konventionelle Methoden:
Eine Reihe von Methoden wird verwendet, um einen variablen Widerstand zu erhalten. Bei Trommelcontrollern variiert der Widerstand unter Verwendung von Drehschaltern und einem geteilten Widerstand in wenigen Schritten. Der variable Widerstand kann auch unter Verwendung von seriellen Schützen und Widerständen erhalten werden.
Hochleistungsanwendungen verwenden einen Schiebegulator, der aus drei Elektroden besteht, die aus Salzwasser bestehen. Der Widerstand variiert, indem der Abstand zwischen den Elektroden und der irdischen Elektrode geändert wird.
Wenn die Leistung hoch ist, werden die Elektroden von einem kleinen Motor angetrieben. Der Vorteil dieser Methode besteht darin, dass der Widerstand ohne Schritt geändert werden kann.
Statische Rotorwiderstandskontrolle:
Der Rotorwiderstand kann auch ohne Schritt variiert werden, indem die Schaltung in Abbildung 6.51 verwendet wird. Die Rotorausgangsspannung des Rotors wird durch eine Diodenbrücke behoben und mit einer parallelen Kombination eines festen Widerstands R und einem von einem TR -Transistor hergestellten Halbleiterschalter geliefert (Abb. 6.51).
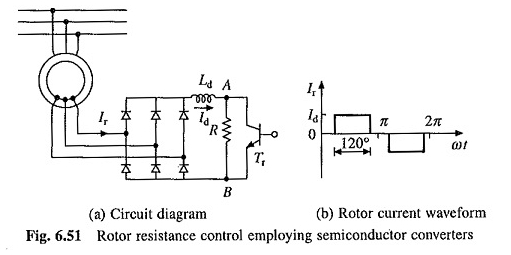
Der effektive Wert des Widerstands zwischen den Klemmen A und B, RAB, wird durch einen variablen Dienstbericht des TR -Transistors variiert, der wiederum den Widerstand gegen den Rotorschaltungsschaltungsschaltungsschaltpunkt variiert. Die LD -Induktivität wird hinzugefügt, um die Welle und Diskontinuität in der aktuellen CC -Verbindung zu verringern.
Die Wellenform des Rotorstroms wird angezeigt. In Abbildung 6.5104, wenn die Welle vernachlässigt wird. Somit wird der Strom des RMS -Rotors sein

Der Widerstand zwischen den Klemmen A und B ist Null, wenn der Transistor eingeschaltet ist, und es wird R, wenn er gelöscht wird. Folglich wird der Durchschnittswert des Widerstands zwischen den Klemmen gegeben
![]()
wobei δ der Servicebericht des Transistors ist und durch die Gleichung angegeben wird. (5.112).
Die von Rab verbrauchte Kraft ist
![]()
Gleichungen. (6.88) und (6.89), die von Rab pro Phase verbrauchte Leistung ist

Die Gleichung (6.90) legt nahe, dass der Widerstand gegen den Rotorschaltkreis pro Phase um 0,5R (1 – δ) erhöht wird. Somit ist der Gesamtwiderstand des Rotorschaltkreises pro Phase nun

RRT kann von RR zu (RR + 0,5R) variiert werden, da Δ von 1 auf 0 ging.
In Abbildung 6.52 ist ein Closed -Loop -Geschwindigkeitsregelungsdiagramm mit der internen Stromregelschleife dargestellt. Rotor -IR -Strom und daher hat die ID einen konstanten Wert am maximalen Drehmomentpunkt, sowohl während des Motors als auch des Steckers.
Wenn der aktuelle Begrenzer für diesen Strom gesättigt wird, beschleunigt der Leser das maximale Drehmoment und verlangsamt sich, was eine sehr schnelle Übergangsreaktion ergibt. Damit das Verstopfung auftritt, muss die Anordnung zur Inversion der Phasensequenz getroffen werden.
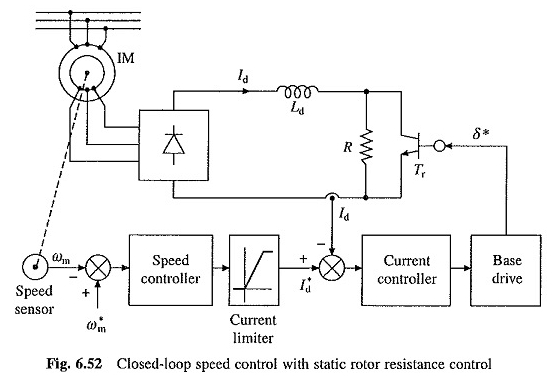
Im Vergleich zur konventionellen Rotorwiderstandskontrolle des Induktionsmotors hat die Steuerung des Widerstands gegen den statischen Rotor mehrere Vorteile wie reibungsloser und ohne Schritt, die schnelle Reaktion, weniger Wartung, kompakte Größe, einfache Schleifensteuerung und Rotorwiderstand bleiben zwischen den drei Phasen für alle Betriebspunkte ausgeglichen.