Entwurf des im Induktionsmotors verwendeten Stromversorgungsschemas:
Das im Induktionsmotor verwendete Schieber -Leistungswiederherstellungsdiagramm – Abbildung 6.53 zeigt eine äquivalente Schaltung eines Induktionsmotors des Wundrotors mit einer in seinen Rotor injizierten Spannungs -VR, unter der Annahme, dass das Stator -Rotor -Verhältnis der Kurven. Wenn der Rotorkupferverlust vernachlässigt wird
![]()
wobei PR die von der VR -Quelle absorbierte Leistung ist. Die Amplitude und das Vorzeichen von PR können durch Steuerung der Größe und der VR -Phase gesteuert werden. Wenn PR Null ist, arbeitet der Motor mit seinem Merkmal des natürlichen Geschwindigkeitsdrehmoments.
Ein positiver PR reduziert PMS und daher wird der Motor mit einer geringeren Geschwindigkeit für das gleiche Drehmoment betrieben. Wenn PR gleich pg, PM und daher die Geschwindigkeit null ist. Somit ermöglicht die Variation von PR von 0 zu PG die Geschwindigkeit der Synchrongeschwindigkeit bei Null. Die Polarität der VR für diese Operation ist in Abbildung 6.53 durch eine kontinuierliche Linie dargestellt.
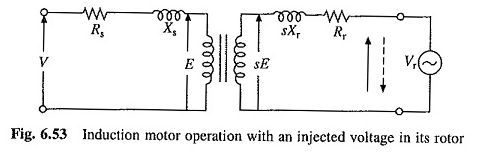
Wenn PR negativ ist, wirkt der IE VR als Stromquelle, PM ist größer als PG und der Motor arbeitet mit einer Geschwindigkeit höher als die Synchrongeschwindigkeit. Die Polarität des VR für die Geschwindigkeitsregelung über der Synchrongeschwindigkeit wird durch eine gepunktete Linie in Abbildung 6.53 dargestellt.
Wenn der Rotorkupferverlust vernachlässigt wird, entspricht PR dem in der Induktionsmotor SPG verwendeten Schieberschema -Wiederherstellungsschema. Die Geschwindigkeitsregelung unter der Synchrongeschwindigkeit wird durch Steuerung der Schieberleistung erhalten. Der gleiche Ansatz wurde bei der Kontrolle des Rotorwiderstands angewendet.
Anstatt die Kraft in externen Widerständen zu verschwenden, wird sie hier nützlich verwendet. Infolgedessen werden diese Geschwindigkeitsregelmethoden als Schieberschema für die Wiederherstellung von Stromversorgungsleistungen klassifiziert, die in den Wiederherstellungsmustern der Induktionsmotor verwendet werden. Zwei dieser Muster, das statische statische Training von Sherbius und Kramer, werden hier beschrieben.
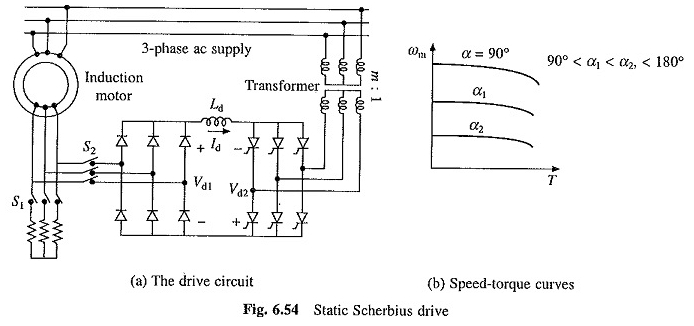
Drive de Scherbius statisch (Abb. 6.54 (a)):
Es bietet eine Geschwindigkeitssteuerung eines Wundrotormotors unter synchroner Geschwindigkeit. Ein Teil der Wechselstromleistung des Rotors wird durch eine Diodenbrücke in CC umgewandelt. Der kontrollierte Gleichrichter, der als Wechselrichter arbeitet, wandelt es in AC um und gibt es in die Wechselstromquelle zurück. Macht wurde zurückgegeben (das heißt
PR) kann überprüft werden, indem der EMF VD2 -Wechselrichterzähler kontrolliert wird, der wiederum die Steuerung durch Steuerung des Spannwinkels ist. Die CC -Anleihe -Induktivität wird bereitgestellt, um die Welligkeit im aktuellen CC -Verbindungsbetrag zu verringern.
Da das Wiederherstellungsschema der in der Induktionsmotor verwendeten Gleitkraft der Quelle angegeben wird, hat das Fahren im Gegensatz zur Kontrolle des Rotorwiderstands, bei dem es im Widerstand verschwendet wird, eine hohe Effizienz.
Der Leser hat aus den gleichen Gründen eine höhere Effizienz als die Statorspannungsregelung durch Wechselspannungscontroller.
Die Antriebsnetz -Versorgung ist die Differenz zwischen Motoreingangsleistung und zurückgegebener Leistung. Die reaktive Eingangsleistung ist die Summe der reaktiven Leistungen des Motors und des Wechselrichters. Daher hat die Scheibe einen schlechten Leistungsfaktor im gesamten Strand ihres Betriebs.
In Abbildung 6.54 (a) vernachlässigen Sie den Stator und die Rotorentropfen

Wobei α der Schießwinkel des Wechselrichters bzw. n und m ist, das Stator / Rotor -Verhältnis von Kurven des Motorverhältnisses und der Seite der Quelle mit dem Wandler der Kurven am Transformator. Vernachlässigen Sie den Sturz durch den Induktor
![]()
Gleichungen ersetzen. (6.93) und (6.94)

wo a = n / m.
Der maximale Wert von α ist auf 165 ° begrenzt, um die Wechselrichter -Thyristoren sicher zu wechseln. Die Verschiebung kann von 0 auf 0,966a überprüft werden, wenn α von 90 auf 165 ° stieg. Durch angemessene Auswahl von A kann der erforderliche Geschwindigkeitsbereich erhalten werden.
Der Transformator wird verwendet, um VD1- und VD2 -Spannungen zu entsprechen. Bei der niedrigsten Geschwindigkeit des Lesers hat VD1 den maximalen VD1M -Wert, den durch
![]()
wobei Smax der Wert des Gleitens mit der niedrigsten Geschwindigkeit ist. Wenn α auf 165 ° begrenzt ist, wird m so ausgewählt, dass die Spannung des Wechselrichters einen VD1M -Wert aufweist, wenn α 165 ° IE beträgt

Eine solche Wahl von M sorgt für die Funktionsweise des Wechselrichters im höchsten Schießwinkel bei der niedrigsten Motordrehzahl, was den höchsten Leistungsfaktor (Gleichung (5.109)) und die niedrigste Reaktivleistung bei niedrigster Geschwindigkeit ergibt.
Dies verbessert den Leistungsfaktor im Rohr und reduziert die Reaktivleistung auf alle Geschwindigkeiten des Geschwindigkeitsbereichs des Lesers.
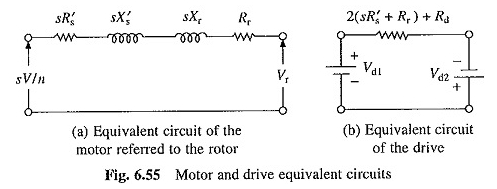
Abbildung 6.55 (a) zeigt eine äquivalente Motorschaltung, die auf den Rotor Bezug genommen wird und den Magnetisierungszweig vernachlässigt. Gleichungsableitung. (6.90) zeigt, dass der Widerstand (SRs + RR) bei der DC -Verbindung 2 (SRs + RR) beträgt. Dies ergibt eine äquivalente Schaltung CC ungefähr des Lesers (Abb.
6.55 (b)), wobei VD1 und VD2 in den Gleichungen angegeben sind. (6.93) und (6.94). RD ist der Widerstand der DC -Verbindungsinduktivität. Die äquivalente Schaltung ignoriert das Schalten über die Diodenbrücke. JETZT

Wenn der Kupferverlust des Rotors vernachlässigt wird
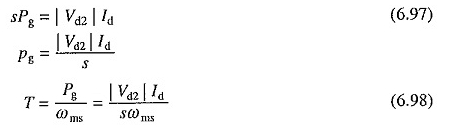
Die Art der Geschwindigkeitsdrehmomentkurven ist in Abbildung 6.54 (6) dargestellt.
Der Leser verfügt über Anwendungen in den Lüfterscheiben und in der Pumpe, für die die Geschwindigkeitsregelung nur in einem engen Bereich erforderlich ist. Wenn das maximale Gleiten durch SMAX angezeigt wird, können die Leistungsbewertungen der Diodenbrücke, der Wechselrichter und der Transformator nur die SMAX -Zeiten der Leistung des Motors (Gleichung 6.97) sein.
Wenn beispielsweise die Geschwindigkeit um nur 20% unter der Synchrongeschwindigkeit reduziert werden muss, beträgt die Leistungsbewertungen der Diodenbrücke, der Wechselrichter und der Transformator nur 20% der Leistung des Motors. Daher hat Drive niedrige Kosten.
Der Leser wird mit geschlossenem S1 und S2 geöffnet (Abb. 6.54) gesteuert. Wenn die Geschwindigkeit den Steuerbereich des Lesers erreicht, wird S2 geschlossen, um die Diodenbrücke zu verbinden, und der Wechselrichter wird aktiviert. Jetzt ist S1 offen, um Widerstand zu beseitigen.
Beim Lüfter- und Pumpentraining ist nicht erforderlich, da der Flüssigkeitsdruck ein ausreichendes Bremsmoment bietet. Um einen konstanten Flüssigkeitsfluss mit Schwankungen des Druckkopfes und der Art der gepumpten Flüssigkeit aufrechtzuerhalten, wird der Leser mit geschlossener Schleifengeschwindigkeitsregelung verwendet.
Ein Kontrollschema der Schließschleifegeschwindigkeit mit der Kontrolle des internen Stroms ist in Abbildung 6.56 dargestellt. Es funktioniert genauso wie das Diagramm von Abbildung 3.5.
Diese Festplatte wird aufgrund von hohen Effizienz und niedrigen Kosten häufig für mittel- und hohe Lüfter- und Pumpentraining (bis zu ungefähr 10 MW) verwendet.
Diese Festplatte bietet eine konstante Drehmomentkontrolle (Gleichung (6.98)). Die nachstehend beschriebene statische Kramer -Player wird konstanter Leistungsregelung erhalten.
Fahren Sie Kramer statisch:
Die Gleitleistung des Rotors wird durch eine Diodenbrücke in CC umgewandelt (Abb. 6.57 (a)). Die CC -Leistung wird nun mechanisch in einen CC -Motor mit dem Induktionsmotor umgewandelt. Das auf Kosten gelieferte Paar ist eine Drehmomentsumme, die von der Induktion und den Gleichstrommotoren erzeugt wird. Die Geschwindigkeitsregelung wird erhalten, indem das Feld des kontinuierlichen Strommotors gesteuert wird.

Abbildung 6.57 (b) zeigt Variationen in VD1 und VD2 mit einer Geschwindigkeit für zwei DC -Motorstromwerte. Der dauerhafte Betrieb wird erhalten, wenn VD1 = VD2, dh à A und B für Felder von Feld IF1 und IF2.
Die Geschwindigkeitskontrolle ist von einer synchronen Geschwindigkeit etwa die Hälfte der Synchrongeschwindigkeit möglich. Wenn ein größerer Geschwindigkeitsbereich erforderlich ist, wird die Diodenbrücke durch eine Thyristorbrücke ersetzt.
Nun kann die Beziehung zwischen VD1 und der Geschwindigkeit geändert werden, indem der Gleichrichterwut des Thyristor -Gleichrichters gesteuert wird (siehe Abb. 6.57 (c)). Die Geschwindigkeit kann jetzt bis zum Anhalten überprüft werden.