Steuerung des Wechselrichters der Spannungsquelle des Induktionsmotors:
Variable Frequenz- und variable Spannungsnetzversorgung für die Induktionsmotorsteuerung kann aus einem SID -Spannung (VSI) oder einem Cycloconverator -Wechselrichter erhalten werden. Die Kontrolle des Wechselrichters der Spannungsquelle des Einweihungsmotors wird hier beschrieben und das Training, das von Cycloconverters gespeist wird.
VSI -Induktionsmotor -Laufwerke:
Die Steuerung der Quelle der Induktionsmotorspannungsquelle ermöglicht es, eine variable Frequenzleistung von einer Gleichstromversorgung zu erhalten. Abbildung 6.37 (a) zeigt einen VSI mit Transistoren. Jedes andere selbstdemotische Gerät kann anstelle eines Transistors verwendet werden.
Im Allgemeinen wird das MOSFET in Wechselrichtern mit niedriger Spannung und niedriger Kraft verwendet, der Iget (bipolarer Transistor mit der isolierten Tür) und die Stromtransistoren bis zum durchschnittlichen Leistungsniveaus und das GTO (Tor dreht den Thyristor) und der IGCT (Thyristor an der isolierten Tür) werden für hohe Kraftwerte verwendet.

Die Steuerung des Induktionsmotorspannungs -Wechselrichters kann als Regalwellenwechselrichter oder Pulsbreite (PWM) verwendet werden.
Wenn sie als Spread Wave -Wechselrichter wirken, werden Transistoren mit einem T / 6 -Zeitunterschied in die Abfolge ihrer Zahl umgeschaltet, und jeder Transistor wird während der T / 2 -Dauer gehalten, wobei T der Zeitraum für einen Zyklus ist. Die resultierende Linienspannungswelle ist in Fig. 1 dargestellt.
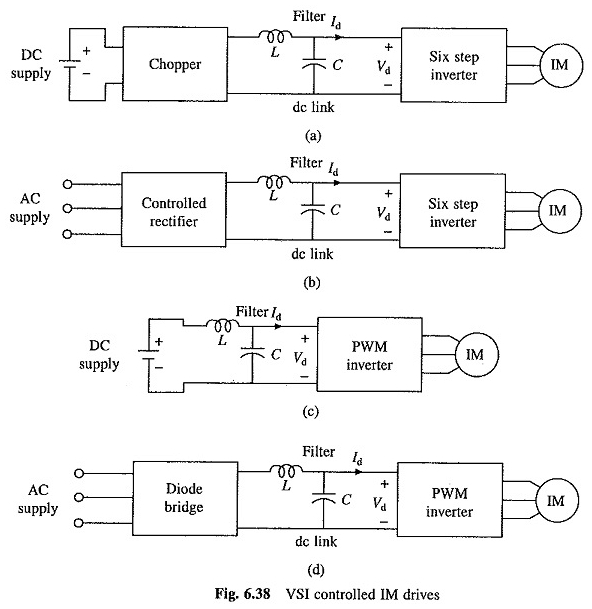
6.37 (b). Die Frequenz des Betriebs des Wechselrichters wird durch Variation t variiert und die Ausgangsspannung des Wechselrichters wird durch Variation der variablen CC -Eingangsspannung variiert. Wenn die Stromversorgung DC ist, wird die variable CC -Eingangsspannung erhalten, indem ein Hubschrauber zwischen der kontinuierlichen Leistung und dem Wechselrichter angeschlossen wird (Abb. 6.38 (a)).
Wenn die Stromversorgung Wechselstrom ist, wird die variable CC -Eingangsspannung erhalten, indem ein kontrollierter Gleichrichter zwischen der Wechselstromleistung und dem Wechselrichter angeschlossen wird (Abb. 6.38 (b)).
Ein großer elektrolytischer Filterkondensator C wird in der DC -Verbindung verbunden, um den Betrieb des Gleichrichters oder des Chopper -Wechselrichters zu erstellen und die Harmonischen in der DC -Verbindungsspannung zu filtern.
Die Wechselrichterausgangs- und Phasenspannungen werden in der folgenden Fourier -Reihe angegeben:


Der RMS -Wert der grundlegenden Phasenspannung

Das Drehmoment für eine bestimmte Geschwindigkeit kann berechnet werden, indem nur die grundlegende Komponente berücksichtigt wird. Der Hauptnachteil des wasserdichten Wellenwechsels ist die große niedrige Harmonische in der Ausgangsspannung.
Infolgedessen leidet ein Induktionsmotorantrieb aus einem Wechselrichter aus der Ausbreitung unter den folgenden Nachteilen:
- Aufgrund von Harmonischen mit niedriger Frequenz werden motorische Verluste bei allen Geschwindigkeiten erhöht, wodurch sich der Motor verengt.
- Der Motor entwickelt pulsierende Paare aufgrund der fünften, siebten, elften und dreizehnten Harmonischen, die bei niedriger Geschwindigkeit eine ruckartige Bewegung des Rotors verursachen.
- Der harmonische Inhalt des Motorstroms nimmt mit niedriger Geschwindigkeit zu. Die Maschine, die aufgrund des hohen Verhältnisses (VLF) mit leichten Lasten mit niedriger Geschwindigkeit gesättigt ist. Diese beiden Effekte überhitzen die niedrige Geschwindigkeitsmaschine und begrenzten so die niedrigste Geschwindigkeit auf etwa 40% der Grundgeschwindigkeit.
Die Harmonischen sind verringert, die niedrigen Harmonischen werden beseitigt, die damit verbundenen Verluste werden reduziert und die glatte Bewegung wird auch bei niedriger Geschwindigkeit erhalten, wenn der Wechselrichter als Wechselrichter bearbeitet wird, der durch die Impulsbreite moduliert wird. Feige.
6.37 (c) zeigt die Ausgangsspannungswellenform für die sinusförmige Modulation der Impulsbreite.
Da die Ausgangsspannung jetzt durch Modulation der Impulsbreite gesteuert werden kann, ist keine Bestimmung für die Variation der Eingangs -CC -Spannung erforderlich, der Wechselrichter kann daher direkt angeschlossen werden, wenn die Stromversorgung DC ist [Abb. 6.38 (c)] und über einen Diodengleichrichter, wenn die Stromversorgung AC ist. [Feige. 6.38 (d)].
Die grundlegende Komponente der Ausgangsphasespannung eines PWM -Wechselrichters, der mit PWM Sinusoidal arbeitet

Wo ist der Modulationsindex?
Der Motorstromharmonische erzeugt eine Drehmomentpulsation und erfordern den Motor. Für einen harmonischen Gehalt, der bei der Kontrolle des Motorterminals verabreicht wird, werden die aktuellen Harmonischen reduziert, wenn der Motor eine höhere Leckageinduktivität aufweist, wodurch die Schrumpf- und Drehmomentpulsationen verringert werden.
Folglich wird verwendet, wenn aus dem Wechselrichter des Wechselrichters der Spannungsquelle des Induktionsmotors mit einer signifikanten Lecksinduktivität (im Vergleich zur Stromversorgung der sinusförmigen Stromversorgung) verwendet wird.
Bremsen und Multiquadrant -Betrieb von Motor -Induktionsmotor -Training:
Die Stromversorgung im Motor ist gegeben von
![]()
Oder
V = grundlegende Komponente der motorischen Phasenspannung
Ost = grundlegende Komponente des Motorphasenstroms
Φ = Phasenwinkel zwischen V und IS.
Bei der Funktionsweise des Automobils φ <90 ° ist der Stift daher positiv, dh die Leistungsströme des Wechselrichters zur Maschine. Eine Verringerung der Frequenz macht die Synchrongeschwindigkeit niedriger als die Drehzahl des Rotors und die relative Geschwindigkeit zwischen Rotortreibern und Rotationsflugfeld.
Dies kehrt die EMF um, die durch den Rotor, den Strom des Rotors und die Komponente des Statorstroms induziert wird, der die Rotorwechsel ausbalanciert. Folglich wird der Winkel φ größer als 90 ° und der Stromfluss wird umgekehrt.
Die Maschine arbeitet als Generatorstromversorgung im Wechselrichter, was wiederum die Stromversorgung in CC nährt, indem die aktuelle ID der CC -Verbindung umgekehrt wird.
Regeneratives Bremsen wird erhalten, wenn der vom Wechselrichter zum CC -Glied fließende Leistung nützlich verwendet wird und die dynamische Bremsung erhalten wird, wenn sie in einem Widerstand verschwendet wird.
Dynamisches Bremsen:
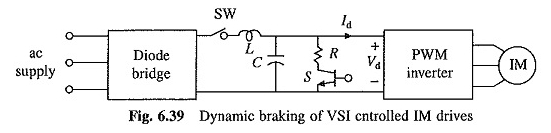
Betrachten wir zunächst die dynamische Bremsung des Wechselrichters, das durch die Pulsbreite von Abbildung 6.38 (D) moduliert wird. Bei dynamischem Bremsen wird der Leser wie in Abbildung 6.39 dargestellt.
Für das dynamische Bremsen werden der SW-Schalter und ein automatisch kommerzieller Schalter (hier Transistor) in Reihe mit einem mit der CC-Verbindung verbundenen RB-Bremswiderstand dem Leser in Abbildung 6.38 (D) zum Leser hinzugefügt. Wenn der Motorbetrieb von der Autobahn zum Bremsschalter fuhr, ist SW offen.
Die in der CC -Verbindung erzeugte Energie lädt den Kondensator und seine Spannungen steigen. Wenn es einen definierten Wert überschreitet, hat der Schalter geschlossen und verbindet den Widerstand über die Verbindung.
Die im Kondensator erzeugte Leistung und ein Teil der Energie fließt in den Widerstand, und die CC -Bindungsspannung verringert. Wenn es seinen nominalen Wert fällt, ist es offen.
Durch das Schließen und Öffnen der Schalter als Funktion des Werts der CC -Bindungsspannung wird die erzeugte Energie im Widerstand abgelöst, wodurch dynamisches Bremsen erzeugt wird. Der dynamische Bremsbetrieb von Feigenscheiben. 6.38 (a) bis (c) kann auf ähnliche Weise erhalten werden.
Regeneratives Bremsen:
Betrachten wir zunächst die regenerative Bremsung des welligen Trainings, das durch die Pulsbreite (PWM) von Abb. 6.38 (c) und (d) moduliert wurde. Im Leser von Fig. 6.38 (c), wenn der Betrieb der Maschine vom Automobil zum Bremsen führt, kehrt und fließt der ID in die DC -Stromversorgung von Energie an der Quelle um.
Somit hat der Leser in Abbildung 6.38 (c) bereits eine regenerative Bremskapazität. Bei der Schulung in Abbildung 6.38 (d) muss die Stromversorgung der CC -Verbindung zum regenerativen Bremsen auf die Wechselstromversorgung übertragen werden.
Wenn der Betrieb vom Automobil zur Brems -ID geht, bleibt die VD jedoch in die gleiche Richtung. Für die regenerative Bremskapazität ist ein Konverter, der die kontinuierliche Stromspannung einer Polarität und ein CC -Strom der einen oder anderen Richtung zu verwalten kann.
Ein Doppelkonverter hat diese Kapazität und wurde in der Vergangenheit verwendet. Neuere Discs verwenden den synchronen Verbindungswandler (SLC), da er einen sinusförmigen Strom zum Ausgangsleistungfaktor der CA -Quelle sowohl während des Fahrens als auch während des Brems benötigt.
Obwohl seine Leistung höher ist, erfordert es also weniger Geräte als einen Doppelwandler. Das Prinzip seiner Operation wird hier erklärt.
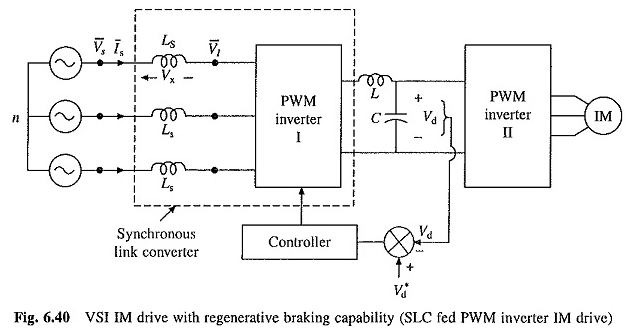
Ein regenerativer Leser mit einem SLC- und PWM -Wechselrichter ist in Abbildung 6.40 dargestellt. Die LS- und PWM -Indukte I sind eine SLC.
Der PWM -Wechselrichter wird verwendet, um eine Spannung VI der Amplitude und die erforderliche Phase und einen niedrigen harmonischen Gehalt zu erzeugen, so dass der Quellstrom nahezu sinusförmig ist und in Phase mit VS für die Autorisierung und 180 ° ohne Phase zum Bremsen einen Leistungsfaktor der Einheit ergibt.
Phasendiagramme sind in den Fig. 1 und 2 dargestellt. 6.41 (a) und (b). Für jeden Wert ist V1 der angegebenen Phase und Größe erforderlich. Dies kann leicht in der sinusförmigen Modulation der Impulsbreite (PWM) erfolgen.
In der Größe PWM sinusförmig und der Phase von V1 hängt von der Amplitude und der Phase des Modulationssignals ab [1]. Folglich kann V1 der angegebenen Phase und Größe erzeugt werden, indem ein Modifikationssignal der Amplitude und der erforderlichen Phase erzeugt wird.
Da VI vom PWM -Wechselrichter erzeugt wird, enthält es keine niedrigen Harmonischen. Die Induktivität LS filtert Hochfrequenzharmonische, um einen fast sinusförmigen Quellenstrom zu erzeugen. Die Phasendiagramme in Abbildung 6.41 ähneln denen einer synchronen Maschine.
Somit ähnelt das Verhalten des synchronen Verbindungswandlers dem einer synchronen Maschine, es wird daher als synchroner Link -Konverter bezeichnet.

Wenn der Leser in Abb. 6.40 im Gleichgewicht arbeitet, muss die von SLC zur Verfügung gestellte Versorgung (Sockel) gleich dem von dem PWM II -Wechselrichter aufgenommenen Strom (geliefert) sein. Da die beiden unabhängig voneinander operieren, wird dies durch eine geschlossene Schleifensteuerung der CC -Verbindungsspannung durchgeführt.
Wenn die von SLC an die CC -Verbindung bereitgestellte Versorgung gleich der von PWM Wechselrichter II erhobenen Leistung ist, wird keine Energie aus dem Kondensator C geliefert oder entnommen und seine Spannung ist konstant und gleich dem Referenzwert VD *.
Wenn nun die Last auf IM erhöht wird, ist die vom PWM II -Wechselrichter aus der DC -Verbindung übertragene Leistung höher als die vom SLC bereitgestellte Leistung. Daher fällt die VD -Kondensatorspannung unter den VD *-Referenzwert.
Die Spannungsregelung der geschlossenen Schleife erhöht den Wert von IS und daher die Stromversorgung der DC -Verbindung. Folglich wird die CC -Verbindungsspannung auf den Referenzwert reduziert.
Da SLC als Boost -Konverter arbeitet, bietet die Closed -Loop -Steuerung der CC -Verbindungsspannung dem Leser eine Fahrkapazität gegen eine Spannung und eine Spannung.
Wenn die Spannung der Wechselstromquelle fällt, behält die Closed -Loop -Spannungsregelung die CC -Bindungsspannung konstant durch Erhöhen durch IS, und daher erhält der Motor weiterhin eine konstante Spannung und erzeugt daher die gleiche Leistung und das gleiche maximale Drehmoment.
Der Leser in Abbildung 6.38 (b) kann eine regenerative Bremskapazität haben, indem der von einem Doppelwandler gesteuerte Gleichrichter ersetzt wird. Die SLC kann nicht verwendet werden, da eine konstante CC -Bindungsspannung erforderlich ist, während die CC -Verbindungsspannung mit sechs Stufen variiert werden muss.
Der Leser in Abbildung 6.38 (a) verfügt über eine regenerative Bremskapazität, wenn in Abbildung 5.44 (in der Lage ist, eine Polarität und den Strom in beide Richtungen zu sparen).
Vier Quadrantenbetrieb:
Vier Quadrantenbetrieb kann durch einen Antrieb mit einer Bremskapazität (regenerativ oder dynamisch) erhalten werden. Eine Verringerung der Frequenz des Wechselrichters, um die Synchrongeschwindigkeit niedriger als die Geschwindigkeit des Motors zu machen, überträgt den Betrieb des Quadranten I (Automobil vorwärts) auf II (vordere Bremsung).
Die Frequenz und Spannung des Wechselrichters werden allmählich reduziert, wenn die Geschwindigkeit fällt, um die Maschine auf Null zu verlangsamen.
Nun wird die Phasensequenz der Wechselrichterausgangspannung durch Austausch der müden Impulse zwischen den beiden Wechselrichter des Wechselrichters zwischen den Paaren (TRL, TR4) und (TR3 und TR6) in Abbildung 6.37 (a) umgekehrt.
Dies überträgt den HI -Quadrantenbetrieb (Reverse Engine). Die Frequenz und Spannung des Wechselrichters werden erhöht, um die in der entgegengesetzte Richtung erforderliche Geschwindigkeit zu erhalten.