Teil -orientierte Kontrolle der dreiphasigen Induktionsmotor:
Der Statorstrom eines Induktionsmotors hat die Produktionsfunktionen des erforderlichen Luftraumstroms (Magnetisierung) und entwickelt das erforderliche Drehmoment, um die Last zu verursachen.
Eine kontrollierte Steuerung des dreiphasigen Induktionsmotors hat einen ähnlichen Betrieb wie ein kontinuierlicher Strommotor, wenn die Statorstromkomponenten (nämlich die Durchflusserzeugung und die Drehmomentproduktion) getrennt gesteuert werden können.
Diese Art der Steuerung ist in einem angeregten CC -Motor getrennt möglich, bei dem das Drehmoment und der Durchfluss separat und unabhängig voneinander gesteuert werden können, indem der Verstärkungs- und Feldstrom variiert.
Zwischen ihnen würde eine inhärente Entkopplung bestehen, aber für die Auswirkungen der Reaktion der Verstärkung. Diese Effekte können durch Kompensation für die Verstärkung beseitigt werden. Eine perfekte Entkopplung kann in einem angeregten CC -Motor getrennt bezahlt werden.
Diese vielseitige Steuerung verleiht einem kontinuierlichen Strommotor ein sehr gutes dynamisches Verhalten. Somit wird ein Hochleistungsantrieb mit einer Drei -Phasen -Induktionsmotorensteuerung erhalten, indem versucht wird, die Statorstromkomponenten zu entkoppeln.
Dieses Prinzip wird als Kontrolle über die Ausrichtung des Feldes oder die Kontrolle des Vektors bezeichnet. Diese Kontrolle verbessert das dynamische Verhalten und sehr gutes Leistungstraining kann auch bei niedriger Geschwindigkeit erhalten werden.
Die beiden Komponenten des Stroms werden identifiziert und sind im Vergleich zum Durchflussvektor ordnungsgemäß in den orthogonalen Ordnungen ausgerichtet.
Die Stromkomponenten können in Bezug auf einen der drei Flüsse ausgerichtet werden, nämlich den Statorfluss, den Luftraumstrom oder den Rotorstrom.
Die Analyse zeigt, dass die dynamische Leistung des Lesers nicht auf der gewünschten Ebene liegt, wenn die Ausrichtung im Vergleich zum Stator oder dem Luftraumfluss durchgeführt wird. Dieses dynamische schlechte Verhalten beruht auf der Verzögerung des Paares, indem es der Verschiebung folgt.
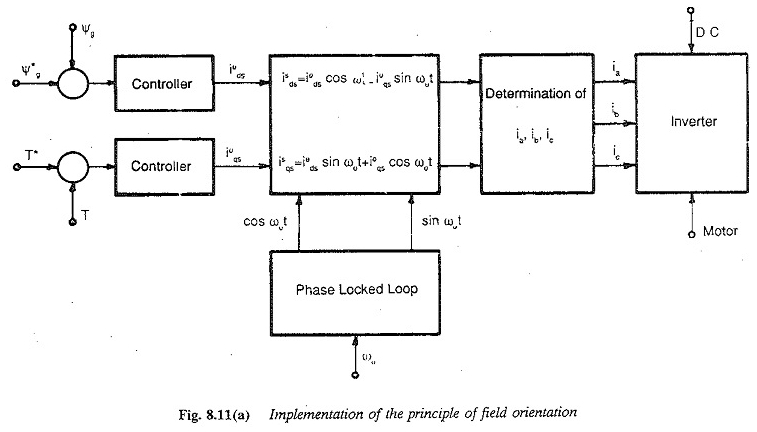
Eine natürliche und effektive Entkopplung ist möglich, wenn die Orientierung im Vergleich zum Rotorfluss durchgeführt wird. Dies führt zu einer Hochleistungsdrehmomentkontrolle des Fahrens mit einer sehr schnellen Reaktion. Die Umsetzung des Orientierungsprinzips vor Ort ist in Abbildung 8.11 dargestellt.
 Als das Prinzip der Feldorientierung vorgeschlagen wurde, wurde nicht die Aufmerksamkeit der Industrie aufmerksam und war aufgrund komplizierter Ausrüstung nicht sehr beliebt. Mit Entwicklungen in digitalen Komponenten und Mikroprozessoren durch LSI und der Miniaturisierung von Komponenten wird diese hohe Leistungssteuerung der Kontrolle der dreiphasigen Induktionsmotor populär. Ein Hauptgebiet der Anwendung und die effektive Verwendung von Mikroprozessoren mit hoher Geschwindigkeit ist die Vektorsteuerung der kontrollierten Steuerung in der dreiphasigen Induktionsmotor. Diese Kontrolle erfordert
Als das Prinzip der Feldorientierung vorgeschlagen wurde, wurde nicht die Aufmerksamkeit der Industrie aufmerksam und war aufgrund komplizierter Ausrüstung nicht sehr beliebt. Mit Entwicklungen in digitalen Komponenten und Mikroprozessoren durch LSI und der Miniaturisierung von Komponenten wird diese hohe Leistungssteuerung der Kontrolle der dreiphasigen Induktionsmotor populär. Ein Hauptgebiet der Anwendung und die effektive Verwendung von Mikroprozessoren mit hoher Geschwindigkeit ist die Vektorsteuerung der kontrollierten Steuerung in der dreiphasigen Induktionsmotor. Diese Kontrolle erfordert
- Genaue Informationen zum Rotorfluss.
- Die genaue Einstellung der Statorstromkomponenten als Funktion der Referenz.
Die Funktionen eines Mikroprozessors in der Vektorsteuerung der Induktionsmotor sind wie folgt:
- Behandlung von Signalen, die vom Baumcodierer erhalten wurden, um die Geschwindigkeit des Rotors und auch den Rotorwinkel zu bestimmen. Dieser Rotorwinkel sollte in Transformationen von einem Rahmen zum anderen verwendet werden.
- Die Durchflussschätzung unter Verwendung von Klemmenspannungen, Strömen und Geschwindigkeit, abhängig von einem der Maschinenmodelle.
- Berechnungen in Bezug auf Phasen- und Koordinaten Transformationen, um die beiden Komponenten des Stroms zu identifizieren. Nach der erforderlichen Kontrolle müssen diese Komponenten transformiert werden, um die Referenzwerte für den Vergleich mit realen Phasenströmen bereitzustellen.
- Geschwindigkeits- und Stromschleifen in der Rückkopplungsregelung. Die Implementierung von Controllern in diesen Schleifen.
- Um Gittersignale für den Maschinen Seitenwandler und die Linienseite zu erzeugen, entscheidet der Maschinen Seitenwandler die Frequenz, während die Linienseite den Strom / die Spannung entscheidet. Die Schießsignale zum Seitenleitungswandler werden auf die gleiche Weise erhalten, wie für einen Doppelwandler beschrieben wird. Die Aufnahmesignale zum Maschinenseitenkonverter entscheiden die Frequenz. Die auf dem Feld von drei Phasen -Induktion -Engine ausgerichtete Steuergeschwindigkeit wird zum Ausgang des Schiebetegels hinzugefügt, um die Frequenz des Wechselrichterausgangs zu bestimmen. Die Zugabe muss genau sein, da eine große Menge zu einer kleinen hinzugefügt wird. Die digitale Ergänzung zu einem Mikroprozessor ist präzise. Der Mikroprozessor muss daher in der Lage sein, den Maschinenseitenwandler Aufnahmesignale bereitzustellen oder zu generieren.
- Datenerfassung Der Mikroprozessor muss Feedback -Signale in digitaler Form erwerben. Eine Datenübertragung zum Prozessor ist erforderlich. Ein Datenfluss des Prozessors und des Prozessors ist erforderlich.
- Begrenzung der linearen Funktionen Kontrollvariablen, die im Kontrollverhalten verwendet werden, sowie das nichtlineare Verhalten des Konverters während der diskontinuierlichen Leitung. Kompensation für den variablen Gewinn bei diskontinuierlichen Leitungsmodi und Schwächung des Feldes.
Zu den mathematischen Operationen gehören Multiplikation, Abteilung, Addition und Subtraktion. Die mikroprozessorarithmetische Verarbeitungseinheit muss in der Lage sein, diese Vorgänge auszuführen.
Die Durchflussschätzung kann durch digitale Integration unter Verwendung der gut bekannten Simpson -Regel oder der Trapez -Regel durchgeführt werden. Die Ergebnisse leiden jedoch unter einem Präzisionsverlust aufgrund von Kürzungsfehlern bei achtbitischen Prozessoren. Diese Fehler führen zur Instabilität von Operationen.
Verwenden Sie I von Floating Command mit doppelter Genauigkeit verbessert die Prozessorleistung. Dies erfordert jedoch eine lange Berechnungsphase. Um die Mikroprozessorbelastung zu verringern, kann die Durchflussschätzung durch analoge Modelle außerhalb des Prozessors weggetragen werden.
Der berechnete Fluss kann im Prozessor behandelt werden. Die Referenzwerte von Strömen und Flüssen werden vom Prozessor entwickelt.
Abhängig von der Geschwindigkeit des Prozessors und seiner Fähigkeit, die oben genannten Funktionen zu erfüllen, kann zwischen den lokalen Geräten und dem Mikroprozessor ein Rand festgelegt werden, um die Funktionen zu erfüllen.
Manchmal kann die Mehrfachprozessor -Steuerung je nach Geschwindigkeit und Qualität der erforderlichen Steuerung durchgeführt werden.
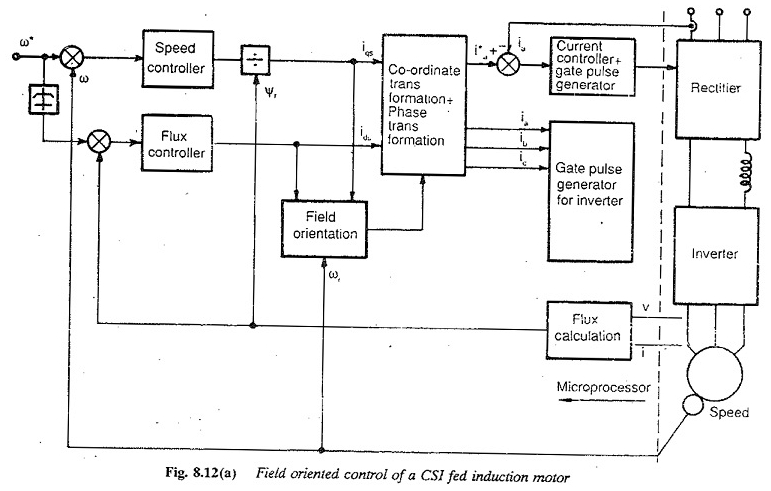
Die Orientierung am Boden ist mit dem Spannungsquelle -Wechselrichter sowie der Steuerung der Stromquelle der Stromquelle möglich, die vom Feld der dreiphasigen Induktionsmotor geliefert wird. Der aktuelle Quellwechselrichter wird aufgrund der Einfachheit seines Leistungskreislaufs weit verbreitet.
Die Eigenschaften der vom Kontrollorientierten Steuerung unter Verwendung von CSI werden hier erörtert (8.12 (a)). Manchmal kann ein PWM -Wechselrichter ordnungsgemäß gesteuert werden, um Referenzströme bereitzustellen (Abb. 8.12 (b)). Diese Kontrolle kann mit einem Mikroprozessor erreicht werden.

Der Fluss kann direkt unter Verwendung von Forschungsspulen oder Hall -Sonden gemessen werden. Analoge Signale werden in digital umgewandelt, um sich für die spätere Behandlung im Mikroprozessor zu ernähren.
Diese direkte Maßnahme hat, selbst wenn sie theoretisch genau sind, die folgenden Einschränkungen oder Schwierigkeiten: Das Vorhandensein empfindlicher Raumsonden oder Suchspulen macht den Induktionsmotor empfindlicher, aber seine inhärente Robustheit geht verloren.
Das gemessene Signal wird durch Schlitzharmonische überlagert, die eine Filterung erfordern. Hilfe bei der Messung und Konvertierungsfehlern macht die Ergebnisse nicht sehr zuverlässig. Daher wird normalerweise die FLWC -Berechnung unter Verwendung von Maschinenmodellen verwendet (indirekte Schätzung).
Diese Maschinenmodelle zur Berechnung des Durchflusses verwenden die auf dem Boden der drei Phaseninduktionsparameter ausgerichteten Steuerung, die aus Rotortests ohne Last bestimmt und blockiert sind. Ungenauigkeit; Unter den Modellen bei der Schätzung von Parametern die Variation der Maschine!
Die Parameter aufgrund von Temperatur und Sättigung müssen in der Schätzung genau berücksichtigt werden. Die Präzision wird im Falle einer Integration geändert, die an der Schätzung beteiligt ist. Dies geschieht, wenn die Spannung und Geschwindigkeit in der Berechnung verwendet werden.
Bei niedriger Geschwindigkeit führt die Integration erhebliche Fehler in diese Fehler ein, und zu einer zuverlässigen Leistung kann am Stopp auf einer Vielzahl von Stopps erfolgen.
Um die Leistung zu verbessern, müssen die im Modell verwendeten Maschineneinstellungen so präzise wie möglich sein. Andernfalls können sie mit einem Korrekturprozess korrigiert werden, sodass die genaue Kopplung möglich ist. Der Korrekturprozess verbessert den Parameter.
Die Schätzung des indirekten Flusses sowie der als Parameter bezeichneten Identifizierung oder Anpassung werden verwendet, um eine Induktionsmotor mit perfekter Kopplung zu erhalten.
Der geschätzte Fluss aus tatsächlichen erkannten Variablen des Stroms und der Geschwindigkeit mit den Parametern wird mit dem Referenzwert verglichen (bestimmt aus den Referenzmengen). Die Differenz wird verwendet, um die Parameter der Maschine zu korrigieren, die in die Berechnungen eingeben.
Der einflussreichste Parameter ist der Rotorwiderstand oder die Rotorzeitkonstante und wird korrigiert, bis der erforderliche Wert des Flusses durch das Modell angegeben ist.
Die einzige Lösung für die feldorientierte Steuerung durch Anpassung der Parameter ist die Verwendung von Mikroprozessoren oder Mikrocomputern. In der Literatur sind verschiedene Techniken zur Anpassungsparameter erhältlich. Ein solches Diagramm ist in Abbildung 8.13 dargestellt.
Der Mikroprozessor muss mathematische Operationen durchführen, um den Fluss beider Referenzwerte sowie gemessene Variablen abzuschätzen.

Die Auswahl eines Mikroprozessors für die obige Anwendung kann auf den folgenden Überlegungen basieren:
- Auflösung des Preises für den kontrollierten Gleichrichter in der Phase. Die Auflösung entscheidet sich für die Asymmetrie beim Schießen.
- Mathematische Operationen, die durchgeführt werden können. Es sollte in der Lage sein, binäre und dezimale Arithmetik, einschließlich Multiplikation und Teilung
- Die erforderliche Speicherkapazität
- Interne Uhrgenerierung
- Softwareverwaltung zur Implementierung von Controllern, Limitern usw.
- Unterbrechungskapazität
Einige andere Anwendungen eines Mikroprozessors bei der Kontrolle von Induktionsmotoren sind:
- Ein Mikroprozessor kann verwendet werden
- Es kann verwendet werden, um die Geschwindigkeit mithilfe des Schemas für die Wiederherstellung von Schiebernenergie zu steuern. Die Verkt -Steuerung kann auch hier verwendet werden.
- Es kann für den kontrollierten kontrollierten Leser mit der Durchfluss- und Drehmomentkontrolle im Fed -CSI -Training verwendet werden.
- Kann verwendet werden, um PWM -Techniken zu implementieren, um Spannungen und Harmonische sowohl in VSI- als auch in CSI -Induktionsmotoren zu kontrollieren.
- Es kann zur Steuerung des Cycloconverteur verwendet werden.