Variable Frequenzsteuerung des Einführungsmotorantriebs:
Variable Frequenzsteuerung des Induktionsmotorantriebs – Synchrondrehzahl, daher kann die Motordrehzahl durch eine variable Leistungsfrequenz gesteuert werden. Die im Stator induzierte Spannung ist proportional zum Produkt der Versorgungsfrequenz und des Luftverletzungsstroms.
Wenn der Statorverfall vernachlässigt wird, kann die Spannung des Terminals proportional zum Produkt der Frequenz und des Flusses angesehen werden.
Jede Verringerung der Versorgungsfrequenz ohne Änderung der Klemmenspannung führt zu einer Zunahme des Luftverletzungsstroms. Die Induktionsmotoren sind so ausgelegt, dass sie am Kniepunkt der Merkmal der Magnetisierung betrieben werden, um das magnetische Material vollständig zu verwenden.
Daher sättigt die Erhöhung des Flusses den Motor. Dies wird den Magnetisierungsstrom erhöhen, den Strom und die Spannung der Linie verformen, den Verlust des Kerns und den Verlust von Kupfer des Stators erhöhen und ein akustisches Rauschen bei hohem Kamin erzeugen.
Obwohl eine Erhöhung des Flusses, das über den bewerteten Wert hinausgeht, aufgrund der Berücksichtigung von Sättigungseffekten unerwünscht ist, wird auch eine Abnahme des Durchflusses vermieden, um die Motordrehmomentkapazität aufrechtzuerhalten.
Infolgedessen wird die Kontrolle der variablen Frequenz des Induktionsmotorantriebs unterhalb der Nennfrequenz im Allgemeinen durch eine variable Klemmespannung mit der Frequenz am nominalen Luftverlusterfluss durchgeführt, um die Verhältniskonstante (v / f) zum Nennwert aufrechtzuerhalten. Der Gleichung. (6.13)
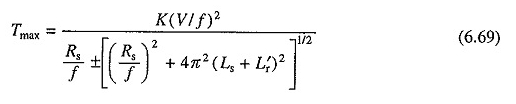
Wobei K konstant ist und LS und L ‚jeweils der Stator und der Stator die Induktivität des Rotors verwiesen haben. Das positive Vorzeichen betrifft die Funktionsweise des Automobils und das negative Vorzeichen gilt für den Bremsvorgang.
Wenn die Frequenz nicht niedrig ist, (Rs / F) ≪ 2π (Ls + L ‚R) und daher aus (6.69) und daher aus (6.69)

Die Gleichung (6.70) legt nahe, dass der Motor mit einem konstanten Verhältnis (v / f) ein konstantes maximales Drehmoment entwickelt, außer bei niedriger Geschwindigkeit (oder Frequenzen). Der Motor arbeitet daher im konstanten Drehmomentmodus. Nach Gl.
(6.69) für niedrige Frequenzen (oder niedrige Geschwindigkeiten) aufgrund des Widerstandsabfalls des Stators [dh, wenn (Rs / F) im Vergleich zu 2π (LS + L ‚R) nicht vernachlässigbar ist, hat das maximale Drehmoment bei der Funktionsweise des Motors (Signal -EVE) und ein höherer Wert des Bremens (Zeichen).
Dieses Verhalten ist auf die Verringerung des Flusses während des Betriebs des Automobils und auf die Erhöhung des Flusses während der Funktionsweise der Bremsung zurückzuführen. Wenn es notwendig ist, dass das gleiche maximale Drehmoment auch bei niedriger Geschwindigkeit im Betrieb des Automobils aufbewahrt wird, wird das Verhältnis (v / f) bei niedriger Frequenz erhöht.
Dies führt zu einer zusätzlichen Zunahme des maximalen Bremsdrehmoments und einer beträchtlichen Sättigung der Maschine bei der Funktionsweise des Brems.
Wenn Sie bei der Grundgeschwindigkeit den Nennwert haben oder erreichen, kann er mit der Frequenz nicht erhöht werden. Daher wird die Frequenz über der Grundgeschwindigkeit mit konstanter v. Gemäß Gl. (6.70), wobei V konstant beibehalten wurde, nimmt das maximale Drehmoment mit zunehmender Frequenz (oder Geschwindigkeit) ab.
Die Variation der Klemmenspannung mit der Frequenz ist daher wie in Abbildung 6.33 (a) dargestellt. V wird über der Grundgeschwindigkeit konstant gehalten. Unterhalb des Grundgeschwindigkeitsverhältnisses (v / f) wird konstant gehalten, außer bei niedriger Frequenz, wobei das Verhältnis (v / f) erhöht wird, um das maximale konstante Drehmoment aufrechtzuerhalten.
Die entsprechenden Drehmomentkurven sind in Abbildung 6.33 (b) sowohl für die Hülle als auch für Bremsvorgänge dargestellt. Die Kurven legen nahe, dass die Geschwindigkeitssteuerung und der Bremsbetrieb mit einer Geschwindigkeitsgeschwindigkeit bei der Geschwindigkeit der Synchrongeschwindigkeit erhältlich sind.

Ein bestimmtes Drehmoment wird mit einem niedrigeren Strom erhalten, wenn der Betrieb bei jeder Frequenz zwischen der Synchrongeschwindigkeit und dem maximalen Drehmomentpunkt sowohl für die Autooperationen als auch für das Bremsen begrenzt ist.
Infolgedessen ist der Betrieb des Motors für jede Frequenz zwischen der Synchrongeschwindigkeit und dem maximalen Drehmomentpunkt begrenzt, wie durch die vollständigen Linien von Abbildung 6.33 (b) gezeigt.
Die variable Frequenzsteuerung des Induktionsmotorantriebs bietet aufgrund der folgenden Eigenschaften eine gute Betriebsleistung und vorübergehend:
- Die Geschwindigkeitsregelung und der Bremsbetrieb sind von Null bis zur oberen Grundgeschwindigkeit erhältlich.
- Während der Transienten (Start -up, Bremsen und Geschwindigkeitsumkehr) kann der Betrieb mit einem maximalen Drehmoment mit einem reduzierten Strom durchgeführt werden, was eine gute dynamische Antwort gibt.
- Kupferverluste sind gering und der Effizienz und der Leistungsfaktor sind hoch, da der Betrieb zwischen der Synchrongeschwindigkeit und dem maximalen Drehmomentpunkt bei allen Frequenzen begrenzt ist.
- Der Rückgang der Geschwindigkeit des Mangels an Volllast ist gering.
Der wichtigste Vorteil der variablen Frequenzsteuerung des Einweihungsmotors besteht darin, dass ein variabler Antrieb mit einer guten Betriebsfunktion und einer Übergangsleistung von einem Eichhörnchen -Käfig -Induktion -Engine übernommen wird.
Der Eichhörnchen -Käfigmotor hat im Vergleich zu einem Gleichstrommotor eine Reihe von Vorteilen. Es ist kostengünstig, robust, zuverlässig und langlebiger.
Aufgrund des Fehlens eines Schalters und der Bürsten erfordert es praktisch keine Wartung, kann es in einer explosiven und kontaminierten Umgebung ausgenutzt werden und für höhere Geschwindigkeiten, Spannungen und Energieabmessungen ausgelegt werden. Es hat auch niedrigere Trägheit, Volumen und Gewicht.
Obwohl die Kosten für einen Eichhörnchen -Käfigmotor im Vergleich zu einem kontinuierlichen Strommotor derselben Note viel niedriger sind, sind die Gesamtkosten des Motor -Induktion -Motortrainings im Allgemeinen höher.
Aufgrund der oben aufgeführten Vorteile werden die Leser der variablen Frequenzinduktionsmotor für die meisten Anwendungen den CC -Enginescheiben vorgezogen.
In speziellen Anwendungen sind motorische Leser mit variabler Frequenzinduktion eine natürliche Wahl.
Sie haben mehrere andere Anwendungen wie Traktion, Mühlentische, Stahlwerke, Pumpen, Lüfter, Gebläse, Kompressoren, Spitters, Träger, Werkzeugmaschinen usw.
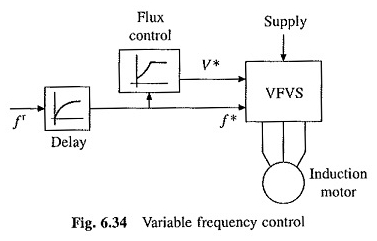
Das Blockdiagramm der variablen Frequenzregelung des Einführung des Einführung Motor -Fahrschemas ist in Abbildung 6.34 dargestellt. Der Motor wird von einer variablen Spannungsquelle mit variabler Frequenz (VFV) geliefert. V * und f * sind Spannungs- und Frequenzsteuerungen für VFVs.
Der Flussregelblock erzeugt einen Spannungsbefehl v * für VFVs, um die Beziehung von Abbildung 6.33 (a) zwischen V * und F * aufrechtzuerhalten. Die Referenzfrequenz f * wird bei Kontrollgeschwindigkeit geändert.
Eine Verzögerungsschaltung wird zwischen F * und FR eingeführt, sodass sich F * selbst dann nur dann langsam ändert, sodass sich die Motordrehzahl der FT -Änderungen folgen kann, wodurch der Motorbetrieb für jede Frequenz zwischen der Synchrongeschwindigkeit und dem maximalen Drehmomentpunkt eingeschränkt wird. VFVs können ein Spannungsquellen -Wechselrichter oder ein Cycloconverteur sein.
Geschwindigkeitsgeschwindigkeitskontrolle:
Sei V und F die Nennspannung und Frequenz der Maschine. Wenn der Motor unter der Grundgeschwindigkeit mit einer konstanten Steuerung (v / f) verwendet wird, ist die Klemmespannung für eine Frequenz KF, wobei k ein Faktor wie 0 ≤ k ≤ 1. ist.
Ersetzen Sie die KV -Spannung und die KF -Frequenz und vernachlässigen den Widerstand des Stators, die Gleichungen (6.4) und (6.10).
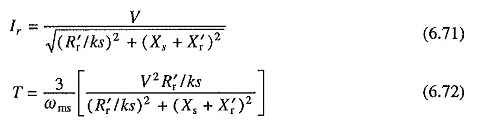
In Gleichungen. (6.71) und (6.72) Wenn (ks) konstant gehalten wird, weil k variiert wird, bleibt der Strom des Rotors IR und das Paar T konstant. Da die Verschiebung klein ist, steht der R mit der Spannung im Einklang. Da der Fluss konstant ist, ist IM auch konstant. JETZT
![]()
Wenn der Betrieb des Motors mit einem konstanten Wert von KS bei der Variation der Frequenz durchgeführt wird, betreibt der Motor auf einem konstanten Strom und einem Drehmoment. Lassen Sie uns die Bedeutung von KS untersuchen.
Bei der KF -Frequenz
HINWEIS ωST ist die Gleitgeschwindigkeit, die die Differenz in der Drehfeldgeschwindigkeit kωms und die Geschwindigkeit des Rotors ωm ist. Es ist auch der Rückgang der Motordrehzahl seiner Last ohne Last, wenn die Maschine geladen ist.
Die obige Diskussion zeigt. Für jeden Wert von T ist der Abfall der Motordrehzahl von seiner Lastgeschwindigkeit (KωMS) für alle Frequenzen gleich. Daher die Eigenschaften des Maschinengeschwindigkeitsdrehmoments für 0
Die Funktion der Maschine mit einer konstanten Gleitgeschwindigkeit beinhaltet auch den Betrieb bei einer konstanten Rotorfrequenz, wie unten angegeben

wobei FR und ωr jeweils die Frequenz des Rotors in Hz und rad / s sind.
Für s> (xs + x’r), daher aus den Gleichungen. (6.72) und (6.73)

EQN. (6.76) schlägt das für s vor
Abhängig von der obigen Diskussion haben der Motorstrom und das Drehmoment bei einer Gleitgeschwindigkeit bei allen Frequenzen die gleichen Werte. Somit kann der Motorstrom und das Drehmoment durch Steuern der Gleitgeschwindigkeit gesteuert werden.
Darüber hinaus kann der Motorstrom innerhalb einer Sicherheitsgrenze begrenzt werden, indem die Gleitgeschwindigkeit begrenzt wird. Dieses Verhalten wird in einer Schleifengeschwindigkeitsregelung verwendet, um den Strom innerhalb eines autorisierten Grenzwerts zu begrenzen.
Betrachten wir dann den Vorgang über der Grundgeschwindigkeit. Wie bereits erwähnt, arbeitet die Maschine mit einer konstanten Spannung V. Jetzt jetzt

Da die Frequenz größer ist als die Anmerkung k> 1.. Da der Betrieb wieder zwischen der Synchrongeschwindigkeit und dem maximalen Drehmoment begrenzt ist, hat die Verschiebung daher einen geringen Wert, deshalb ein kleiner Wert

Somit erhöht sich für Geschwindigkeiten über der Grundgeschwindigkeit bis hin zu einer gegebenen und damit ungefähr einer Spende die Gleitgeschwindigkeit ωsl linear mit k (oder Frequenz). Dieses Verhalten wird in einer Schleifengeschwindigkeitsregelung verwendet, um den Strom im autorisierten Wert über der Grundgeschwindigkeit zu begrenzen.
Da die Verschiebung gering ist, steht der R im Einklang mit V. Wenn der Maschinenverlust der Maschine vernachlässigt wird, wird die entwickelte Leistung gegeben
![]()
Daher ist der PM für eine gegebene und daher für ein IS konstant. Der Leser arbeitet daher im konstanten Leistungsmodus.
Drehmoment- und Leistungsbeschränkungen sowie Betriebsmodi:
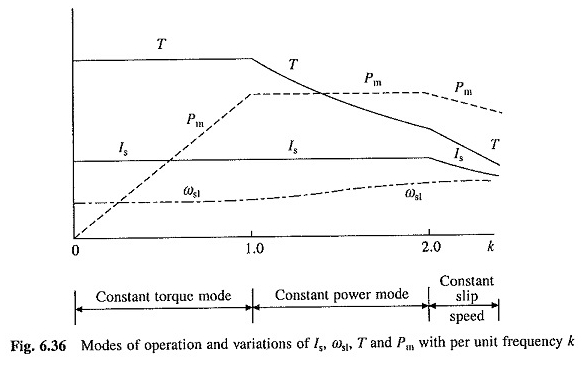
Variationen des Drehmoments und der Leistung für einen gegebenen Statorstrom und für Frequenzen unterhalb und über der Nennfrequenz sind in Abbildung 6.35 durch Punkte dargestellt.
Wenn der Statorstrom den maximal autorisierten Wert aufweist, repräsentieren diese das maximale Drehmoment und die Motorversorgungskapazitäten in der variablen Frequenzregelung des Induktionsmotorantriebs.
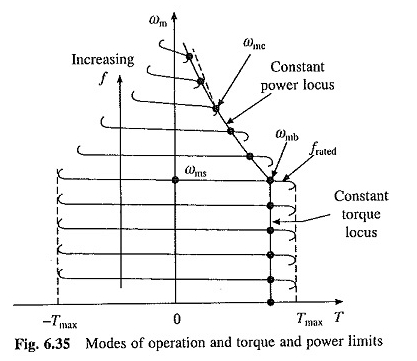
Die Variation des maximalen Drehmoment- und Leistungskapazitäten mit der Frequenz ist in Abbildung 6.36 dargestellt. Die Variation der Gleitgeschwindigkeit ωsl mit der Frequenz wird auch in dieser Abbildung dargestellt.
Wie in Abb. 6.35 und 6.36 gezeigt, hat der Motor ein konstantes maximales Drehmoment von Null bis die Grundgeschwindigkeit ωmm, sodass der Leser im konstanten Drehmomentmodus arbeitet. In diesem Frequenzbereich wird V mit der Frequenz modifiziert, wie in Abb. 1 gezeigt.
6.33 (a) und die Geschwindigkeit des maximal autorisierten Stroms bleibt konstant. Von der Grundgeschwindigkeit bis zur Geschwindigkeit ωmc hat die maximale Leistung einen konstanten Wert, sodass der Motor im konstanten Stromversorgungsmodus funktioniert. Bei der Geschwindigkeit ωmc (Abb. 6.35) wird das Ausfalldrehmoment erreicht.
Jeder Versuch, den Motor im maximal autorisierten Strom über diese Geschwindigkeit hinaus zu betreiben, hält den Motor. Infolgedessen arbeitet die Maschine über die ωmc -Geschwindigkeit hinaus mit einer konstanten Gleitgeschwindigkeit und der maximal autorisierte Strom und die maximale Leistung kann abnehmen (Abb. 6.36).
Jetzt reduziert der Motorstrom umgekehrt umgekehrt und Drehmoment nimmt umgekehrt ab, da die Geschwindigkeit quadratisch ist. Der Betrieb in dieser Region ist in den Scheiben erforderlich, die einen weiten Geschwindigkeitsbereich, ein niedriges Drehmoment bei hohen Geschwindigkeiten erfordern.
Beispielsweise arbeitet der Leser in Traktionsanwendungen in diesem Bereich, wenn er mit voller Geschwindigkeit arbeitet, da das im Gleichgewicht mit hohem Geschwindigkeitsgleichgewicht erforderliche Drehmoment im Vergleich zu seinem Wert während der Beschleunigung sehr niedrig ist.