Fonte quadrata della fonte di tensione dell’inverter nutrita all’induzione del motore:
Il lettore del motore a induzione nutrito con l’inverter di tensione dell’onda quadra è una sorta di convertitore di legami CC, che è un dispositivo di conversione a due fasi. Una dieta a tre fasi viene prima rettificata usando un raddrizzatore sul lato della linea.
Il CC rettificato è invertito in AC della frequenza desiderata da un inverter sul lato del carico, come mostrato nella Figura 4.22. Quando il carico non può fornire la potenza reattiva richiesta per l’inverter, l’inverter deve necessariamente essere una forza comune.
L’induttanza nel circuito di collegamento CC fornisce un livellamento mentre la capacità mantiene la coerenza della tensione di legame. La tensione di collegamento è una qualità controllata.
La tensione istantanea sui terminali della macchina (ai terminali di uscita dell’inverter) è in qualsiasi momento direttamente proporzionale alla tensione di connessione CC (alimentazione CC che è di bassa impedenza interna) e la corrente della macchina (uscita) è una funzione dell’assunzione di carico.
Di conseguenza, il carico ideale per un motore a induzione alimentato con l’inverter della sorgente d’onda quadra, tenendo conto delle armoniche nella corrente di ricarica, dovrebbe essere molto induttivo e avere un fattore di potenza basso.

Con l’adeguata commutazione dei tiristi dell’inverter, la tensione di collegamento CC viene colpita alternativamente attraverso le fasi del motore a induzione. La forma d’onda di tensione sui terminali di uscita dipende solo da questa commutazione e da questa conduzione di tiristi.
Se i tiristori guidano 180 ° in un periodo, la tensione di uscita è sotto forma di un’onda quadra. In questo caso, il controllo della tensione è ottenuto mediante un raddrizzatore controllato in fase sul lato della linea.
La tensione di collegamento CC è variabile e la forma d’onda di tensione di uscita rimane la stessa a tutti i carichi e le frequenze. L’inverter è anche chiamato inverter ad onda quadra, perché la tensione di uscita è un’onda quadra.
Questi inverter hanno problemi di commutazione a frequenze molto basse, poiché il legame DC disponibile a queste frequenze non può sufficientemente caricare condensatori di comunicazione per comunicare i tiristi. Ciò pone un limite alla frequenza operativa inferiore.
Per estendere la frequenza a zero, è necessario utilizzare circuiti di carico speciali. L’intervallo di controllo della velocità dell’inverter dell’onda quadra in un inverter nutrito con induzione che opera su un inverter a onda quadra è 1: 20.
La polarità della tensione del collegamento CC non può essere modificata. Di conseguenza, durante la rigenerazione, la direzione corrente nel circuito di connessione deve essere invertita. È richiesto un convertitore di fase separato sul lato della linea per la rigenerazione, come mostrato nella Figura 4.22.
La frenata dinamica può essere utilizzata utilizzando resistori commutati. Il sistema dinamico del sistema non è molto buono nelle basse frequenze.
È possibile l’avvio del motore dolce. Una macchina che opera su una frequenza variabile, il convertitore di tensione variabile non richiede ulteriori apparecchiature di avvio.
La macchina funziona normalmente sulla parte lineare della curva della velocità di coppia e non vede la coppia e la corrente bloccata del rotore nella sua partenza. La macchina ha caratteristiche identiche del punto sincrono nel punto di coppia massimo, ad ogni frequenza.
La coppia e la corrente della macchina possono essere mantenute costanti in questa spiaggia variando la frequenza e la tensione contemporaneamente e delicatamente a una coppia costante e corrente alla velocità richiesta, variando la frequenza dello statore e mantenendo la frequenza del rotore costante.
L’accelerazione è in modalità controllata a flusso costante. La modalità in cui lo spostamento viene mantenuto costante e il flusso è controllato (modalità di flusso di scorrimento costante) anche per scopi di avvio. Questi metodi si aggiungono all’efficacia del lettore.
Quando lo spostamento viene utilizzato come quantità controllata per mantenere la costante di flusso nel motore, il lettore viene chiamato lettore controllato scorrevole.
Rendendo negativo lo scorrimento (cioè diminuendo la frequenza di uscita dell’inverter), la macchina può essere progettata per funzionare come generatore e l’energia delle parti rotanti è aumentata al convertitore di linea aggiuntivo o dissipata in una resistenza alla frenata dinamica.
Mantenere la frequenza di scorrimento costante (o uno scivolo di controllo), è possibile eseguire la frenata a una coppia costante e la corrente. Pertanto, anche la frenata è veloce.
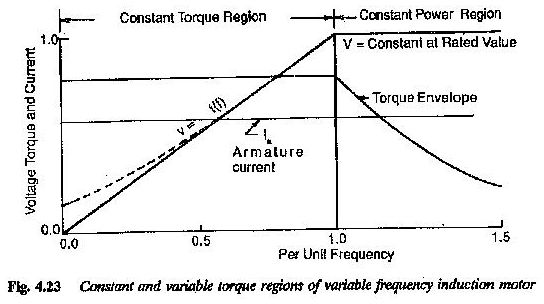
Poiché la tensione può essere variata per mantenere il flusso costante, il funzionamento costante della coppia è possibile fino alla frequenza nominale. Oltre alla frequenza nominale, la tensione rimane al suo valore nominale e la macchina funziona in modalità fluida.
Il motore fornisce un’uscita costante a tutte le velocità ed è chiamato costante modalità di potenza del cavallo. Queste modalità sono rappresentate nella Figura 4.23.
Il motore riceve tensioni ad onda quadra. Questa tensione ha componenti armonici. La corrente di rinforzo risultante non è sinusoidale, con picchi. Questi picchi in realtà decidono la valutazione del design dell’inverter. Le armoniche di corrente dello statore causano ulteriori perdite e riscaldamento.
Il motore richiede quindi un restringimento o per una determinata potenza di un determinato cavallo, è necessario utilizzare un motore di grandi dimensioni.
Queste armoniche sono anche responsabili degli impulsi di coppia. La reazione della quinta e settima armonica con il fondamentale dà alla luce la sesta armonica sviluppata dalla coppia.
Per un inverter della fonte di onda quadra di onda alimentata a un motore di induzione nutrito da un inverter a onda quadra, il contenuto armonico della corrente tende a rimanere costante indipendente dalla frequenza di ingresso, nella spiaggia delle frequenze operative dell’inverter.
Il picco e le correnti armoniche della linea e la corrente dello statore sono influenzati dalla reattanza delle perdite del motore. La reattanza di perdite è alta più piccola è il contenuto armonico e il valore massimo della corrente dello statore.
È quindi necessario scegliere un motore a induzione con una grande reattanza di perdita per il funzionamento su un motore a induzione alimentato con la fonte quadrata di onda quadrata. Poiché le correnti avanzate sono più basse, la valutazione del design dell’inverter diminuisce. Il controllo ad anello aperto è possibile, ma può avere problemi di stabilità a bassa velocità.
È possibile il funzionamento multimotorio e la commutazione è indipendente dal carico. Il convertitore rappresenta una fonte e il motore può essere collegato. Di conseguenza, non è necessaria alcuna corrispondenza tra il convertitore e il carico.
Come guidare verso lo scivolo, un motore VSI Fed ha le seguenti caratteristiche aggiuntive:
Il controllo del flusso indiretto può essere ottenuto mediante controllo scorrevole. Poiché la quantità di equilibrio è specificata nel controllo, il comportamento dinamico potrebbe non essere soddisfacente. È possibile un controllo di coppia preciso su una vasta gamma di velocità (a volte quando è fermato).
È un lettore molto efficace, con un ottimo fattore di efficienza e potenza, quando la frequenza di scorrimento è limitata alla parte lineare della curva di velocità di coppia.
Non è necessaria alcuna attrezzatura iniziale e accelerazione molto rapida è possibile per coppia e corrente costanti. La rigenerazione o la frenata dinamica sono anche possibili per la coppia e la corrente costanti. Sono possibili quattro lettori di quadranti.
Il controllo della frequenza a circuito chiuso fornisce un’unità a velocità variabile con le caratteristiche del motore CC nel sistema Ward Leonard.
Le caratteristiche di un motore di induzione nutrito all’inverter della sorgente di onda quadra possono essere riassunte come segue:
1. Landers ha impressionato la tensione di corrente continua dell’ampiezza variabile.
2.A anche per il giocatore multimototore.
3. L’ordine è indipendente dal carico. Il convertitore e il carico non devono essere il convertitore rappresenta una fonte a cui è possibile collegare il motore.
4.Questa frequenze di uscita del convertitore di corrente fino a 1500 Hz. Questo disco è molto adatto per (motori di) funzionamento ad alta velocità. I dischi sono disponibili fino alla notazione di 200 kVA.
5. La frequenza operativa più bassa limitata mediante commutazione è di circa 5 Hz. La gamma di velocità è 1: 20.
6. Non adattato all’accelerazione al carico e al carico improvviso cambia.
7. Il comportamento dinamico è abbastanza bravo ad alta velocità.
8. La frenata dinamica è possibile. La rigenerazione (quattro operazioni di quadrante) richiede un ulteriore convertitore antiparallelo collegato sul lato della linea. L’inversione di velocità si ottiene modificando la sequenza di fase.
9.La tensione di ingresso al motore non è sinusoidale. Ciò si traduce in ulteriori perdite, riscaldamento e impulsi di coppia.
10. Il moto deve avere un’induttanza di perdite abbastanza grandi da limitare le correnti avanzate e ridurre il contenuto armonico THP.
11. Il controllo dell’apri del motore è possibile, ma può avere un problema di stabilità a bassa velocità.
12. Il fattore di potenza della linea è scarso a causa del controllo di fase.
13.I può essere gestito come lettore controllato scorrevole.
14. Trova l’applicazione come una formazione industriale per uso generale per una potenza bassa a media.