Azionamento del motore a induzione alimentato con l’inverter Inverter:
Lettore del motore a induzione alimentato sulla sorgente corrente – In un inverter della sorgente di tensione, il motore di induzione alimentato con induzione, la tensione applicata allo statore è proporzionale alla frequenza, con una correzione per la goccia di resistenza dello statore, in particolare a bassa velocità, per mantenere il flusso costante.
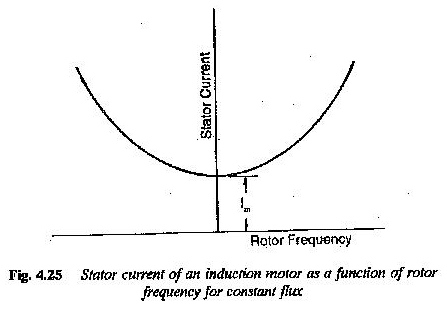
È un fatto ben noto che la corrente disegnata da un motore a induzione non dipende dalla frequenza dello statore quando il flusso di spazio aereo è costante. Esiste una relazione fissa tra la frequenza di slittamento e la corrente dello statore per il flusso nominale nello spazio aereo, come mostrato in FIG.
4.25. Controllando lo scorrimento del motore, è possibile controllare la corrente dello statore. È quindi possibile il controllo del flusso indiretto. Il controllo è più semplice del controllo di tensione. La curva tra la frequenza di slittamento e la corrente dello statore può essere calcolata usando il circuito equivalente. Un inverter PWM può essere controllato per fornire le correnti desiderate nel motore.
In un convertitore di legame CC, se viene verificata la corrente di connessione CC, l’inverter viene chiamato inverter di origine corrente. La corrente nel collegamento CC è mantenuta costante da un’alta induttanza e la capacità del filtro è distribuita.
La tensione di legame CC variabile viene convertita in un motore di induzione alimentato all’inverter dell’inverter nella sorgente di corrente mediante induttanza. L’offerta DC è di grande impedenza.
Poiché la corrente di connessione viene mantenuta costante, la forma d’onda della corrente di uscita è determinata dal funzionamento dell’inverter, mentre la tensione di uscita è determinata dalla natura dell’impedenza del carico.
Un motore a induzione alimentato con l’inverter corrente nell’inverter corrente è adatto a carichi che hanno una bassa impedenza con correnti armoniche e hanno unità PF
Un motore a induzione alimentato con l’inverter inverter corrente ha una configurazione molto semplice. Non sono richiesti diodi di feedback. Un raddrizzatore controllato in fase viene utilizzato sul lato della linea per fornire il controllo di corrente.
Poiché il collegamento CC contiene solo l’induttanza, è possibile la rigenerazione modificando la polarità delle tensioni e mantenendo la direzione della corrente. Pertanto, un lettore di quattro quadranti è semplice e semplice.
Fornisce un’efficace tempesta di buffer dell’uscita dell’inverter dalle variazioni di tensione di alimentazione. Il controllo diretto della corrente dello statore consente di implementare un controllo preciso a circuito chiuso con relativa facilità.
La commutazione dell’inverter dipende dal carico. I parametri di carico fanno parte del circuito di commutazione. È quindi richiesta una corrispondenza tra l’inverter e il motore. L’operazione multimotoria non è possibile.
L’inverter deve necessariamente essere una forza comune, poiché il motore a induzione non può fornire la potenza reattiva dell’inverter.
La costante corrente di connessione CC può fluire attraverso le fasi del motore controllando l’inverter e quindi la corrente del motore è un’onda quasi-carrello. La tensione del motore è quasi sinusoidale con punti a castello, a causa della commutazione.
Questi picchi di tensione decidono sulla valutazione della tensione dei thvristors e influenzano anche l’isolamento del motore. Questi punti possono essere limitati se la macchina ha una piccola reattanza di perdita o se i condensatori di comunicazione sono grandi.
Una macchina con una reattanza di dispersione più piccola è adatta al funzionamento del motore di induzione dell’inverter dell’inverter della sorgente corrente per mantenere almeno i picchi di tensione e le perdite armoniche. L’effetto delle pulsazioni di coppia diminuisce e la frequenza operativa può essere aumentata.
La capacità di commutazione viene scelta per scendere a compromessi tra le punte di tensione e la più alta frequenza operativa. La commutazione richiede una corrente minima finale. L’inverter ha la capacità di recuperare da un errore di commutazione.
L’induttanza della connessione provoca un lento aumento della corrente di guasto e quando raggiunge valori elevati, il difetto può essere eliminato.
Il lettore pone problemi di stabilità a carichi leggeri. Il funzionamento del circuito aperto non è possibile. Ha una gamma molto ampia di controllo della velocità, ma le prestazioni dinamiche sono scarse.
Il motore di trasmissione richiede un restringimento a causa di perdite armoniche e riscaldamento associato. Sono presenti pulsazioni di coppia e la loro ampiezza è grande a bassa frequenza di funzionamento, a causa delle armoniche aggiuntive nel flusso del rotore. Il fattore di potenza della linea è scarso, a causa del controllo di fase.
Fino alla frequenza nominale, il lettore è in modalità di coppia costante e sopra la frequenza nominale che il lettore è in modalità di potenza del cavallo costante.
La corrente dello statore di un motore di induzione che opera su una frequenza variabile, l’alimentazione a tensione variabile è indipendente dalla frequenza dello statore se il flusso di forma dell’aria è mantenuto costante. Tuttavia, dipende dalla frequenza del rotore.
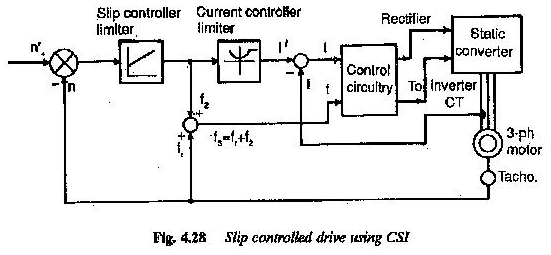
La coppia sviluppata dipende anche dalla frequenza del rotore. Usando queste caratteristiche, un lettore controllato scorrevole (Fig. 4.28) può essere sviluppato utilizzando un inverter di origine corrente per fornire un motore a induzione.
Nel controllo la relazione tra la frequenza del rotore e la corrente dello statore per il flusso nominale nell’aerogap. Pertanto, è possibile il controllo del flusso indiretto. L’uscita del generatore di funzioni fornisce il valore di riferimento della corrente.
La corrente misurata viene confrontata con il valore di riferimento e l’errore viene utilizzato per modificare l’angolo di scatto del convertitore controllato nel lato della linea.
L’ingresso del generatore di funzioni è la differenza tra la velocità di riferimento e la velocità effettiva e può essere considerata una frequenza di scorrimento che viene aggiunta alla frequenza corrispondente alla velocità del rotore, che fornisce il valore della frequenza dello statore e l’inverter sul lato della macchina è controllato per dare questa frequenza.
Il controllo è operativo fino a quando il rotore non raggiunge la velocità desiderata con la frequenza di scorrimento richiesta.
Il lettore controllato dalla diapositiva presenta i seguenti vantaggi:
1. Il lettore di slip controllato è molto efficace.
2. Il controllo preciso della coppia è possibile su un ampio intervallo di velocità.
3. La frequenza di scorrimento può essere qualsiasi valore per il valore corrispondente alla coppia di guasto. L’operazione è un ottimo fattore di potenza. L’operazione è molto stabile.
4. Il rotore può essere accelerato in una coppia costante e informata mantenendo la frequenza del rotore a un valore adeguato. Accelerazione rapida.
5.com che ciò porta all’inizio del soft che il motore non vede le correnti del rotore bloccato e le scivoloni della tensione associate non ci sono.
6. I rotori speciali con coppia iniziale elevata non sono necessari. I rotori con bassa resistenza possono essere utilizzati in modo che le perdite siano limitate.
7. La frenata rigenerativa può essere incorporata. È possibile frenare a una coppia costante.
8. Il lettore ha un’efficienza paragonabile a un giocatore CC tiristolato.
I vantaggi aggiuntivi dei motori a induzione della gabbia scoiattolo come l’elevato rapporto di potenza / peso, una minore manutenzione, una bassa inerzia, nessuna limitazione degli intervalli di potenza e le gamme di velocità, rendono il discorso controllato il disco un vero concorrente ai lettori del motore DC.
I metodi di eliminazione armonica selezionati o i principi PWM possono essere utilizzati per ridurre gli effetti degli impulsi di coppia, specialmente a bassa velocità.
In questi metodi, il controllo può essere ottenuto controllando la corrente di connessione CC e il principio PWM può quindi essere utilizzato solo per controllare il contenuto armonico della forma d’onda di corrente.
Questa separazione delle funzioni di controllo corrente e armonica consente la scelta della strategia di controllo PWM, che migliorerà solo le pulsazioni della coppia del motore e ridurrà le perdite armoniche.
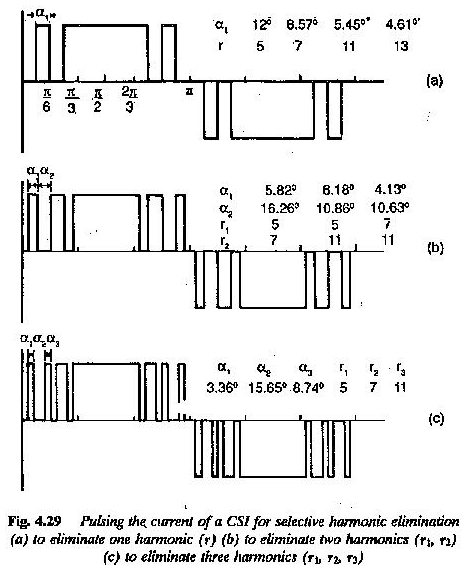
La maggior parte delle strategie PWM per un motore di induzione nell’attuale inverter della sorgente si basa su tecniche di eliminazione armonica selezionate.
Sono usati per eliminare le armoniche dello stato della corrente dello statore e i metodi causano l’eliminazione di increspature di coppia inferiore (Fig. 4.29).
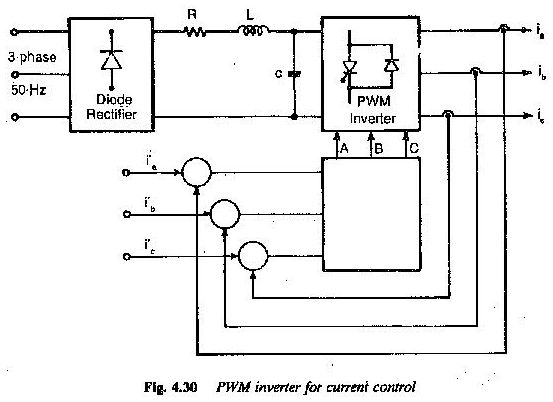
Negli ultimi anni, le strategie PWM sono state appositamente sviluppate per ridurre al minimo l’ondata di velocità del fiume a causa della pulsazione della coppia, per causare l’addestramento con rotazione regolare a bassa velocità (Fig. 4.30).
Le caratteristiche generali del motore a induzione nutrite con l’inverter dell’inverter attuale possono essere riassunte come segue:
1. Scarica la commutazione dipendente: poiché i parametri di caricamento fanno parte del circuito di commutazione, devono essere visualizzati l’inverter e il motore.
2. L’inverter ha una configurazione semplice. I FWD sono assenti.
3. Un’operazione unica del motore
4. Il collegamento CC contiene solo induttanza. Per mantenere una corrente costante, deve essere molto importante. Il funzionamento di due quadranti è semplice
5. Aumento, sul lato della linea è richiesto un raddrizzatore controllato in fase. La tensione di legame CC variabile viene convertita in una fonte costante di corrente mediante un’elevata induttanza del legame.
6.L’Inverter è forzato a fornire correnti di frequenza variabile per alimentare il motore.
7. Il valore della capacità è un compromesso tra i picchi di tensione e la più alta frequenza operativa. La capacità è maggiore, la tensione è più piccola, la frequenza operativa più alta è limitata.
8. La reattanza delle perdite del motore influenza le tensioni armoniche. È anche responsabile dei picchi di tensione durante la commutazione.
La reattanza delle perdite essendo un parametro del circuito di commutazione, determina il tempo di commutazione e quindi la frequenza operativa più elevata è limitata.
Un motore deve avere una reattanza di perdita più piccola per ridurre le tensioni armoniche e i picchi di tensione e aumentare l’intervallo di controllo della velocità. I picchi influenzano la valutazione del tiristore e influenzano l’isolamento. La dimensione del motore diventa più grande se la reattanza di perdite è piccola.
9. La qualità del convertitore tiristatore sono sufficienti. L’uso del tiristore è buono
10. Landers si riprendono dal fallimento della commutazione. L’induttanza della connessione provoca un lento aumento della corrente di guasto e quando raggiunge un valore elevato, può essere eliminata.
11. È un problema di stabilità del carico leggero. Una corrente minima dovrebbe essere lì per il passaggio.
12. Le funzionalità del ciclo operativo non sono possibili. La risposta dinamica è lenta
13.La linea PF è mediocre a causa del controllo di fase.
14. Trova l’applicazione come una formazione media ad alta
15. Gli impulsi causano oscillazioni di velocità a velocità molto basse. Le strategie PWM vengono utilizzate per rimuovere le oscillazioni di velocità e eseguire il funzionamento senza intoppi.
16. Questa coppia costante e le operazioni di alimentazione di cavalli costanti sono possibili.