Caratteristiche di velocità di coppia del motore a induzione:
Dell’equazione. 1.27 Si può osservare che la coppia massima è indipendente dalla resistenza del rotore. Tuttavia, lo spostamento in cui la coppia massima si verifica cambia con la resistenza del rotore.
Quando la resistenza al rotore aumenta, lo scorrimento per la coppia massima è anche la coppia massima e aumenta l’intervallo operativo stabile del motore. Le caratteristiche tipiche della velocità della coppia del motore di induzione per diversi valori di resistenza al rotore sono rappresentate nella Figura 1.22.
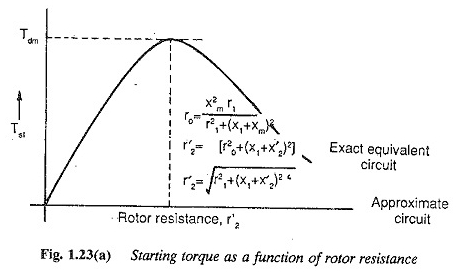
Dalla figura, notiamo che la coppia di partenza può essere aumentata aumentando la resistenza al rotore. La coppia massima si verifica all’inizio -Up se la resistenza del rotore viene aumentata a un valore.

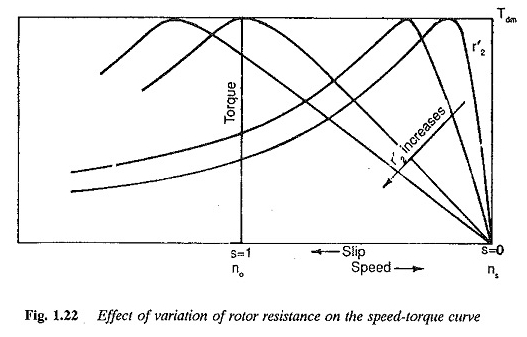
Se l’impedenza dello statore viene trascurata, la resistenza del rotore deve essere aumentata a un valore pari alla reattanza delle perdite del rotore. Se la resistenza al rotore aumenta oltre questo valore, la coppia di partenza diminuisce.
La coppia di guasto si verifica in vetrini maggiori di uno (nella regione di frenata). La corrente iniziale diminuisce e il fattore di potenza iniziale è migliore per aumentare i valori di resistenza al rotore.
Il cambio di carico completo cambia, facilitando il controllo della velocità in un intervallo limitato quando la resistenza del rotore è variata. Tuttavia, l’efficienza viene modificata ad alte resistenze del rotore a causa di un aumento delle perdite. Il riscaldamento del rotore è presente in un rotore di resistenza intrinsecamente elevata.
In breve, le prestazioni di avvio del motore sono migliorate con grandi resistenze del rotore mentre le prestazioni di corse vengono modificate.
Per ottenere i vantaggi di elevata resistenza al rotore all’inizio -up, è collegata una resistenza aggiuntiva nel circuito del rotore del motore a induzione del conducente della ferita e tagliato lentamente man mano che il rotore accelera. A velocità nominale, il motore lavora sulla sua caratteristica naturale. Le connessioni sono rappresentate nella Figura 1.23 (b).
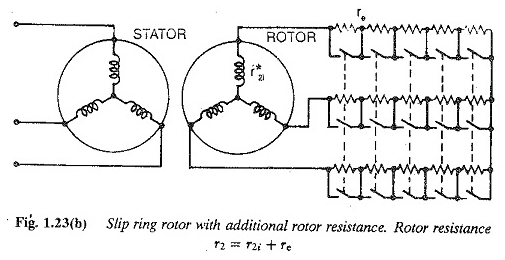
Tuttavia, la connessione di ulteriore resistenza non è possibile nei motori a gabbia scoiattolo. Vengono utilizzate costruzioni di rotori speciali, come rotori a doppia gabbia e barra profonda.
All’inizio -up, a causa dell’elevata frequenza del rotore, la corrente si distribuisce nella gabbia esterna di una doppia gabbia o nella parte superiore della barra nel caso di un rotore a barra profonda. L’effetto dell’alta resistenza viene quindi raggiunto.
Man mano che il motore accelera, la frequenza del rotore diminuisce e la corrente viene distribuita nelle due gabbie del rotore a doppia gabbia o nella barra completa nel rotore della barra profonda. La resistenza efficace è piccola e le prestazioni della gara sono migliorate. Le tipiche curve di velocità di coppia sono rappresentate nella Figura 1.23.
Effetto della variazione di tensione nel motore a induzione:
La caratteristica della velocità chiave di un motore a induzione può essere modificata dall’effetto della variazione di tensione nel motore a induzione. Le caratteristiche tipiche della velocità della coppia del motore di induzione quando sono fornite da una tensione variabile alla frequenza nominale sono riportate nella Figura 1.24 (a).
Si basano sul fatto che la coppia del motore di induzione (con una determinata diapositiva) varia in quanto il quadrato della tensione. Lo spostamento per la coppia massima è indipendente dalla tensione. La coppia a pieno carico si verifica a diversi turni quando la tensione è variata.
Ciò rende fattibile il controllo della velocità dei motori di induzione su un intervallo limitato per variazione della tensione di alimentazione. Tuttavia, la capacità di coppia del motore diminuisce a bassa tensione, a causa della riduzione del flusso di spazio aereo. Il fattore di potenza diminuisce.
Il motore attira correnti pesanti per sviluppare una coppia a bassa tensione data. La corrente disegnata su diverse tensioni è illustrata nella Figura 1.24 (a), nonché la coppia sviluppata a una corrente nominale a diverse tensioni.
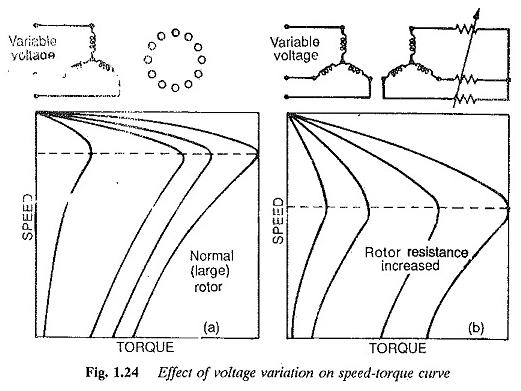
La Figura 1.24 (b) mostra i vantaggi di elevata resistenza nel rotore quando la tensione applicata è variata per modificare la caratteristica della velocità di velocità.
Oltre ad aumentare l’intervallo di controllo della velocità, la corrente tracciata dal motore a bassa tensione può essere limitata da una scelta appropriata di resistenza al rotore.
Pole che cambia nel motore a induzione:
La curva di velocità di velocità di un motore a induzione può essere modificata da un avvolgimento di rinforzo ricollegato per fornire set di poli diversi. Quando il numero di pole che cambia nel motore di induzione, lo stesso vale per la velocità.
Il tipo di connessione decide il carico autorizzato a una coppia costante o una potenza costante. Questo metodo di cambio di post nel motore a induzione è adatto per i motori a gabbia scoiattolo perché i loro rotori possono adottare un certo numero di poli. Non è richiesta alcuna riconnessione dell’avvolgimento del rotore.
Se, d’altra parte, viene utilizzato un rotore anello scorrevole, deve essere ricollegato a diversi set di poli. L’avvolgimento post risultante viene utilizzato per la riconnessione. La fase della bobina cambia efficacemente a velocità diverse.
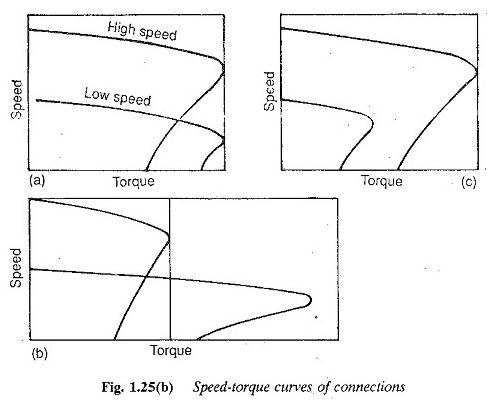
Ogni fase ha un avvolgimento diviso in metà. Questi sono collegati in serie o in parallelo, per modificare efficacemente il numero di poli. Le possibili combinazioni sono rappresentate nella Figura 1.25.
Il funzionamento della potenza costante è fornito dalla connessione Series-Delta per le alte velocità e dalla stella parallela a basse velocità. Ad alta velocità, viene sviluppata una coppia debole in modo che la potenza sia costante. La tensione per metà è v / 2 nella connessione ad alta velocità e v / √3 a bassa velocità.
Connessioni parallele e serie serie per velocità elevate per velocità elevate e basse
Recupero di energia scorrevole del motore a induzione:
La modifica della caratteristica delle linee di velocità utilizzando una resistenza al rotore variabile presenta il principale svantaggio della scarsa efficienza, il che la rende non redditizia. Il funzionamento a bassa velocità non è possibile a causa del surriscaldamento del rotore.
Queste basse velocità possono essere realizzate in modo molto efficace con una ragionevole efficienza utilizzando i modelli di recupero di energia di scivolamento. La potenza scorrevole che viene sprecata nella resistenza esterna nel circuito del rotore viene restituita al settore di questi diagrammi.
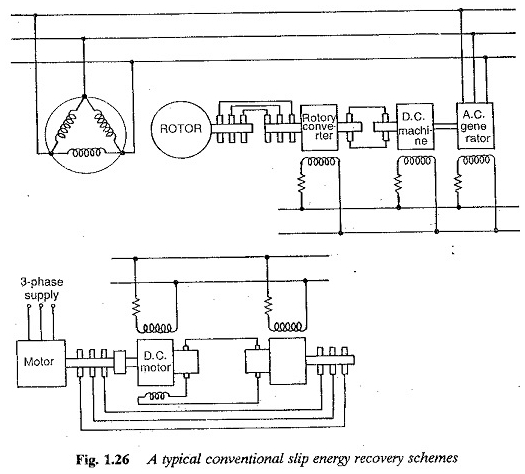
I metodi convenzionali di recupero della potenza scorrevole utilizzano macchine rotanti, come convertitori rotanti, alternatori, macchine DC, ecc. Nel circuito del rotore per convertire la potenza alla frequenza di alimentazione in potenza alla frequenza della linea. Alcuni modelli convenzionali tipici, chiamati controlli Scherbio e Kramer, sono rappresentati nella Figura 1.26.

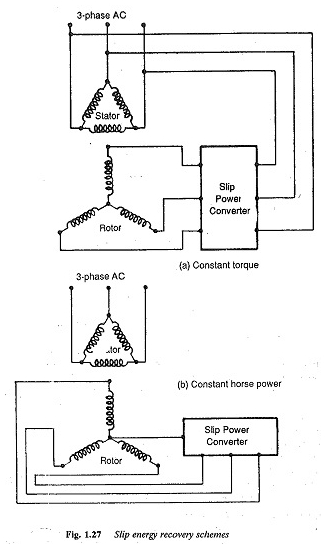
Quando vengono utilizzati questi metodi, il motore / NO deve funzionare per addestrare sia la coppia costante che le cariche di potenza costanti. Questi sono illustrati nella Figura 1.27 (a) e (b), in linea di principio. Nella figura.
1.27 (a) La potenza del rotore alla frequenza di scorrimento viene convertita in frequenza di linea mediante un convertitore scorrevole. Se il convertitore di potenza scorrevole consente il flusso di alimentazione in entrambe le direzioni, il motore può essere utilizzato sia a velocità sub e super sincroni.
Questo schema viene utilizzato per causare carichi di coppia costanti. Nell’operazione sub-sincrona, la potenza scorrevole viene convertita in frequenza di linea e fornita al settore. Nell’operazione supersincrona, la potenza alla frequenza di linea viene convertita in energia scorrevole e fornita al motore.
Una caratteristica importante di questa modifica è che la coppia sviluppata è proporzionale alla corrente del rotore sotto l’ipotesi di un flusso costante nel motore. Le curve di coppia di velocità per questo diagramma sono rappresentate nella Figura 1.28 (a).
La modifica desiderata delle curve di velocità di coppia mostrata nella Figura 1.28 (a) si ottiene controllando il convertitore di potenza scorrevole per corrispondere alla tensione del motore a un determinato turno. Il controllo del convertitore è rappresentato dal parametro A.
L’aumento di un aumento della tensione sul lato del rotore del convertitore di potenza scorrevole causando una caduta di velocità. A maggio è stato fissato per le condizioni del vuoto, fissata a un valore vuoto, il motore ha una caratteristica della velocità di calo della velocità.
Ad esempio, A può essere l’angolo di tiro del convertitore sul lato della linea nel caso di schemi di potenza scorrevole statica.
Il diagramma illustrato nella Figura 1.27 (b) utilizza la potenza scorrevole per guidare una macchina ausiliaria. In questo caso, il convertitore di potenza scorrevole è accoppiato con il rotore del motore a induzione e disegna la potenza. Anche qui sono possibili velocità sub e super sincrine.
Nell’operazione sub-sincrona, la macchina ausiliaria converte la potenza scorrevole in potenza meccanica. Nell’operazione supersincrona, la potenza aggiuntiva viene alimentata con avvolgimenti del rotore attraverso il convertitore scorrevole della macchina ausiliaria. La connessione mantiene una potenza costante.
Le caratteristiche di velocità della coppia del motore a induzione sono rappresentate nella Figura 1.28 (b). Anche qui, A è un parametro del convertitore scorrevole scelto per causare il controllo della velocità come descritto sopra, quando è variato in un determinato modo. La potenza scorrevole è gestita dall’albero del motore principale. La coppia diminuisce con un aumento della velocità.
Con la disponibilità di convertitori di potenza a tiristore, le cascate di convertitore statico (inverter del raddrizzatore) vengono utilizzate nei circuiti del rotore dei motori a induzione per ottenere le modifiche sopra menzionate alla caratteristica della velocità di coppia. I diagrammi sono rappresentati nella Figura 1.29 (a).
La potenza scorrevole viene rettificata e fornita al convertitore della linea comune che alimenta la potenza verso il settore. Le curve di velocità ottenute dalla variazione dell’angolo di tiro inverter sono rappresentate nella Figura 1.29 (6). Un cicloconverteur può essere utilizzato anche nel circuito del rotore.
Iniezione di tensione nel circuito del rotore:
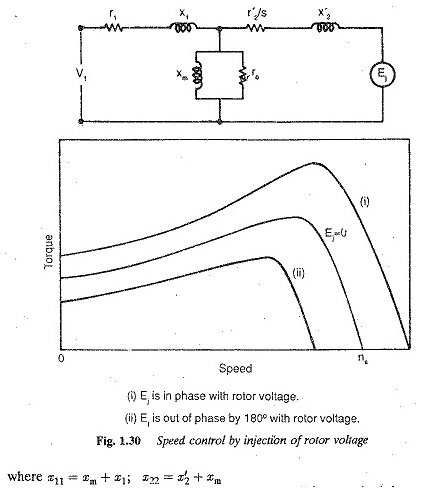
La caratteristica della coppia di un motore a induzione può essere modificata iniettando una tensione nel circuito del rotore (rotore della ferita) di un motore a induzione. La tensione iniettata dovrebbe essere alla frequenza di slittamento.
Se la tensione iniettata è contraria alla tensione del rotore, la corrente effettiva del rotore diminuisce, che influisce immediatamente sulla coppia. La coppia ridotta non può guidare il carico.
La velocità del rotore diminuisce a un valore che garantisce una tensione del rotore indotta sufficiente e quindi una corrente del rotore per causare il carico. Se, d’altra parte, la tensione iniettata aiuta la tensione del rotore, porta ad un aumento della corrente del rotore.
L’aumento della coppia sviluppata accelera il rotore a una velocità con la quale una corrente di rotore sufficiente scorre per causare il carico. Le curve di coppia di velocità per entrambi i casi sono rappresentate nella Figura 1.30.
Per fare un confronto, è anche indicata la curva della velocità di coppia di un rotore corto nel circuito con tensione iniettata zero. Secondo le cifre, si può dedurre che è possibile modificare la capacità di coppia del motore modificando la tensione iniettata.
Quando la tensione iniettata si oppone alla capacità di coppia della corrente del rotore diminuisce, mentre aumenta quando la tensione iniettata facilita la tensione del rotore.
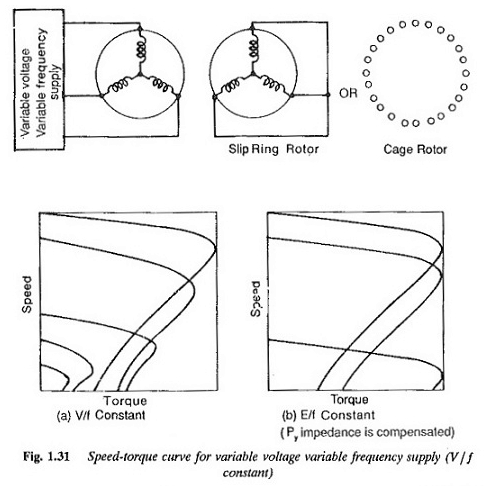
Variazione nella frequenza di potenza:
La velocità di un campo magnetico sincrono dipende dalla frequenza di potenza. Di conseguenza, variando la frequenza di potenza, la velocità sincrona e quindi la velocità del rotore può essere variata.
Per evitare la saturazione a causa di un aumento del flusso a bassa frequenza, la tensione applicata al motore è anche variata in modo che il flusso rimanga costante al suo valore nominale a tutte le frequenze.
Per raggiungere questo obiettivo, un metodo semplice è variare sia la tensione che la frequenza in modo che V / F sia costante. Le curve di velocità di coppia con costante V / F sono rappresentate nella Figura 1.31.
C’è un’esaurimento di coppia a bassa frequenza. Il motore ha una capacità di coppia ridotta e una capacità di sovraccarico. Ciò è dovuto all’effetto dominante della resistenza dello statore a basse frequenze.


Il calo della resistenza diventa apprezzabile rispetto alla tensione applicata. Ciò provoca esaurimento del flusso, la cui consistenza non può essere mantenuta a bassa frequenza. La coppia sviluppata con la costante V / F è
Per avere la stessa coppia e la stessa capacità di sovraccarico a tutte le frequenze, è necessario compensare la caduta dello statore (resistenza) al fine di mantenere costante E / F. V / F non è più costante perché aumenta quando la frequenza diminuisce. La coppia sviluppata in questo caso è data da

O
L ′ 2σ è l’induttanza delle perdite del rotore.
Le curve di velocità di coppia per costante E / F sono rappresentate nella Figura 1.31 (b).
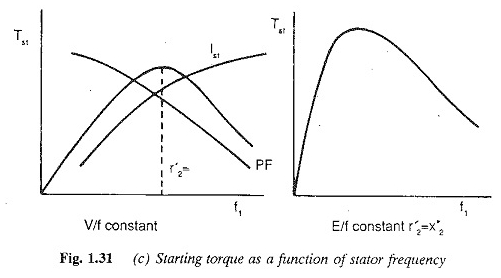
Con il controllo V / F (costante), la coppia iniziale aumenta con una diminuzione della frequenza, fino a un certo valore. Al di sotto di questo valore di frequenza, la coppia iniziale diminuisce. Questo effetto è considerato simile a quello effettuato modificando la reattanza delle perdite del rotore.
Man mano che la frequenza diminuisce, la reattanza delle perdite del rotore. Man mano che la frequenza diminuisce, la reattanza delle perdite del rotore diminuisce. In effetti, si verifica un aumento del rotore, una resistenza rispetto alla reattanza delle perdite.
Di conseguenza, la coppia di partenza aumenta fino a una certa frequenza, in cui la reattanza delle perdite del rotore è uguale alla resistenza al rotore.
Se la frequenza è ridotta, la coppia iniziale diminuisce. La variazione della coppia iniziale con la frequenza è illustrata nella Figura 1.31 (c). Tuttavia, con un controllo E / F costante, la coppia iniziale aumenta quando la frequenza diminuisce a un valore deciso dai parametri.
Se la frequenza è ancora diminuita, la coppia iniziale diminuisce. L’accelerazione può essere ottenuta da una coppia costante e una corrente di rinforzo variando la frequenza dello statore da un valore basso mantenendo costante E / F.
Le caratteristiche di velocità della coppia del motore di induzione sono ottenute aumentando la frequenza di alimentazione oltre il valore nominale. Il flusso del motore diminuisce perché la tensione non può essere aumentata oltre il valore nominale. Il motore opera nel flusso del flusso.
Le curve di velocità di coppia sono parallele tra loro a tutte le frequenze, si estendono al secondo quadrante, dimostrando che è possibile la rigenerazione.
L’avvio del motore può essere facilmente realizzato utilizzando una tensione variabile, un alimentatore a frequenza variabile. Ciò diminuisce la corrente iniziale, dando un paio di accelerare ragionevolmente bene a un buon fattore di potenza anche con motori a gabbia con bassa resistenza.
Controllo della velocità del motore a induzione:
Un motore a induzione a tre fasi è essenzialmente un motore a velocità costante. Non è possibile ottenere un controllo a velocità regolare del motore su una vasta gamma, se fornito da una tensione costante a tre fasi convenzionale, di alimentazione a frequenza costante.
I convertitori di potenza a tirista hanno reso possibile la frequenza variabile e le forniture di tensione variabile. Questi sono usati per ottenere un controllo a velocità regolare dei motori a induzione su una vasta gamma.
I metodi per modificare le caratteristiche della velocità della coppia del motore a induzione discusso sono anche più o meno i metodi di controllo. I convertitori di potenza tiristano sono ampiamente utilizzati per adottare metodi di controllo della velocità, ad esempio
Un elicottero per controllare la resistenza del rotore, il controller di tensione CA per variare la tensione di alimentazione, le cascate del convertitore statico per il recupero di energia scorrevole, ecc.