Caratteristiche di spostamento della coppia del motore a induzione:
L’espressione delle caratteristiche di scorrimento della coppia del motore di induzione (T (S)) è facilmente ottenuta trovando l’equivalente del -venino del circuito a sinistra di AB nella Figura 9.12.
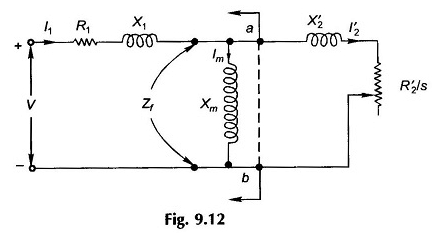
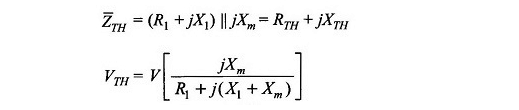
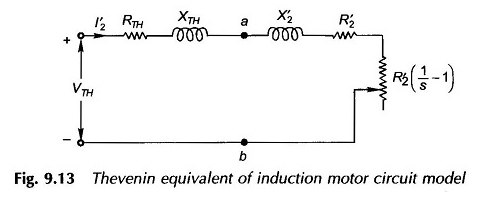
Il circuito viene quindi ridotto nella Figura 9.13 in cui è pratico prendere VTH come tensione di riferimento.
Nella Figura 9.13

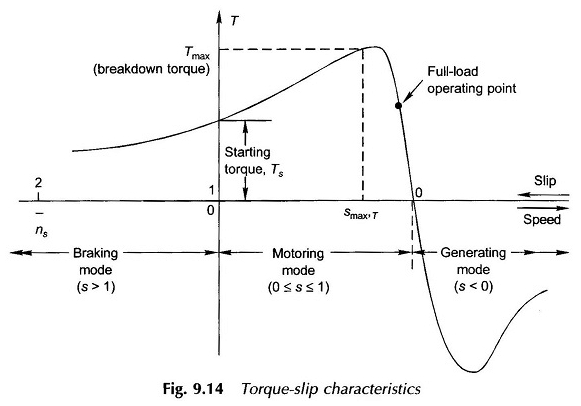
L’equazione (9.22) è l’espressione della coppia sviluppata in funzione della tensione e dello spostamento. Per un determinato valore scorrevole, la coppia è proporzionale al quadrato di tensione. Le caratteristiche di scorrimento della coppia del motore a induzione alla tensione fissa (nominale) sono rintracciate nella Figura 9.14.
Le caratteristiche delle caratteristiche di slittamento della coppia del motore a induzione sono elencate di seguito:
1. Modalità motorie: 0 ≤ s ≤ 1
Per questo intervallo di slittamento, la resistenza al carico nel modello di circuito della Figura 9.13 è positiva, vale a dire che la potenza meccanica è l’uscita o la coppia sviluppata si trova nella direzione in cui si gira il rotore. Anche:
- La coppia è zero a s = 0, come previsto dal ragionamento qualitativo.
- La coppia ha un valore massimo, chiamato coppia di guasto (TBD) a Slip Smax, t. Il motore rallenta fino a quando non viene caricato con più della coppia di guasto.
- A S = 1, vale a dire che quando il rotore è stazionario, la coppia corrisponde alla coppia iniziale, TS. In un motore normalmente progettato, TS è molto inferiore a TBD.
- Il normale punto operativo si trova ben al di sotto della TBD. Lo slittamento completo è generalmente del 2,8%.
- Le caratteristiche di scorrimento della coppia dell’induzione del motore del divieto di co-caricamento a poco oltre l’intero carico sono quasi lineari.
2. Modalità generazione: s <0
Lo spostamento negativo prevede il rotore che opera a una velocità super sincrona (n> ns). La resistenza al carico è negativa nel modello di circuito della Figura 9.13, il che significa che la potenza meccanica deve essere messa in atto mentre la potenza elettrica è estinta ai terminali della macchina.
3. Modalità frenata: s> 1
Il motore funziona nella direzione opposta al campo rotante (cioè negativo), assorbendo la potenza meccanica (azione di frenata) che viene dissipata sotto forma di calore nel rame del rotore.
Coppia massima (ventilazione):
Mentre la coppia massima e lo spostamento in cui si verifica possono essere ottenuti differenziando l’espressione dell’equazione. (9.22), la condizione per la coppia massima può essere ottenuta più facilmente dal teorema del trasferimento di potenza massimo della teoria dei circuiti.
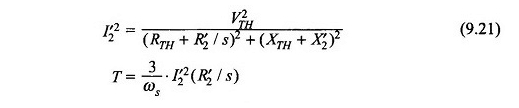
Come sappiamo, la coppia è massima quando I’22 (r’2 / s) è massimo, vale a dire che la potenza massima viene assorbita da R’2 / s nella Figura 9.13. Questa condizione è data come

Sostituendo nell’equazione. (9.22) e semplificare

Si osserva immediatamente che la coppia massima è indipendente dalla resistenza del rotore (R’2) mentre lo spostamento in cui si verifica è direttamente proporzionale ad esso.
La caratteristica scorrevole di coppia di un motore a induzione con anello scorrevole può essere facilmente modificata aggiungendo una resistenza esterna, come mostrato nella Figura 9.15a da quattro di queste caratteristiche con l’aumentare della resistenza progressiva nel circuito del rotore. Possiamo vederlo a seconda dell’equazione.
(9.24), la coppia massima rimane invariata in base all’equazione. (9.23) Lo scivolo alla coppia massima aumenta proporzionalmente man mano che la resistenza viene aggiunta al circuito del rotore.

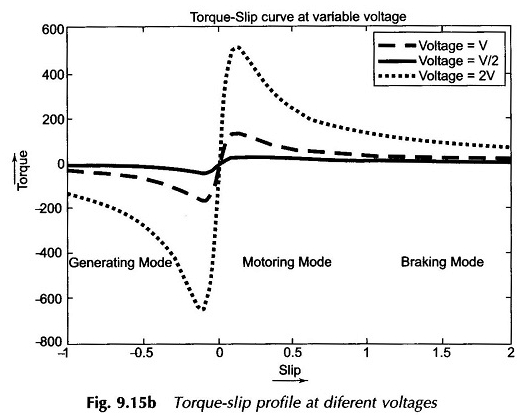
La Figura 9.15b indica il profilo TS con varie tensioni di alimentazione. La velocità può anche essere controllata in questo modo modificando la tensione dello statore. Si può notare che la coppia si è sviluppata in un motore di induzione proporzionale al quadrato della tensione del terminale.
Coppia di partenza:
Lasciando S = 1 nell’equazione. (9.22)

La coppia iniziale aumenta aggiungendo resistenza al circuito del rotore. Dell’equazione. (9.23) La coppia di partenza massima è ottenuta per (smax’t = 1)

Allo stesso tempo, la corrente iniziale si ridurrà (vedere l’Eq. (9.21)). Questo è in effetti il vantaggio del motore a induzione dell’anello scorrevole in cui si ottiene un’alta coppia di partenza a una corrente di partenza bassa.
Un’approssimazione:
A volte, per avere una sensazione (risposta approssimativa) della caratteristica operativa, è pratico supporre che l’impedenza dello statore sia trascurabile che conduce (vedi Fig. 9.13)
![]()
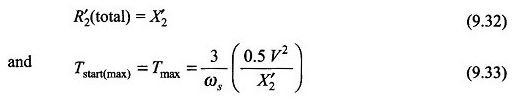
Nel circuito equivalente di Thevenin nella Figura 9.13 in modo che VTH = V. Seghi quindi equazioni (da 9.21) a (9.26)

La coppia di partenza massima si ottiene sulla condizione
Alcune relazioni approssimative a basso turno:
Intorno alla velocità nominale (pieno carico), lo scorrimento del motore a induzione è così piccolo che
![]()
in modo che X’2 possa essere completamente trascurato in un’analisi semplificata. Equazioni (9.27) e (9.28) quindi semplificare a
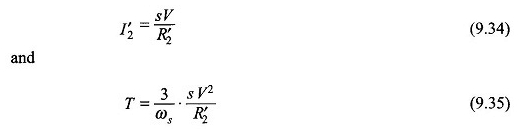
Viene immediatamente osservato dall’equazione. (9.35) che le caratteristiche di scorrimento della coppia del motore a induzione sono quasi lineari nella regione a basso turno che spiega la forma lineare della caratteristica come mostrato nella Figura 9.14.
Output massimo di output:
Poiché la velocità del motore di induzione è ridotta con il carico, la massima potenza di uscita meccanica non corrisponde alla velocità (scorrimento) a cui viene sviluppata una coppia massima. Per una potenza di uscita meccanica massima, la condizione è ottenuta dalla Figura 9.13

La potenza massima può quindi essere trovata corrispondente allo spostamento definito dall’equazione. (9.36). Tuttavia, questa condizione corrisponde a una bassa efficienza e una corrente molto grande ed è ben oltre la normale regione operativa del motore.
Limitazione delle caratteristiche del cambio di coppia del motore a induzione:
I valori dei parametri del modello di circuito devono essere determinati in condizioni che si avvicinano da vicino alla condizione operativa per le quali è necessario utilizzare il modello.
I parametri del modello a circuito valido per la normale condizione operativa darebbero risultati errati se usati per valori di scorrimento anormali.
All’inizio, il motore tira la corrente nominale più volte con conseguente saturazione del nucleo e un sostanziale aumento dello statore e del rotore reagisce. Inoltre, la frequenza del rotore è alta (identica allo statore), i driver del rotore hanno una resistenza maggiore.
Di conseguenza, i parametri buoni per le normali condizioni operative darebbero un risultato pessimistico per la corrente iniziale (maggiore del valore reale) e la coppia iniziale.