Controllo a frequenza variabile dell’unità del motore a induzione:
Controllo della frequenza variabile della trasmissione del motore di induzione – velocità sincrona, pertanto la velocità del motore può essere controllata da una frequenza di alimentazione variabile. La tensione indotta nello statore è proporzionale al prodotto della frequenza di alimentazione e al flusso di gap d’aria.
Se la caduta dello statore viene trascurata, la tensione del terminale può essere considerata proporzionale al prodotto della frequenza e del flusso.
Qualsiasi riduzione della frequenza di alimentazione, senza variazione della tensione terminale, provoca un aumento del flusso di gap d’aria. I motori a induzione sono progettati per funzionare nel punto del ginocchio della caratteristica della magnetizzazione per utilizzare completamente il materiale magnetico.
Pertanto, l’aumento del flusso saturerà il motore. Ciò aumenterà la corrente di magnetizzazione, deformerà la corrente e la tensione della linea, aumenterà la perdita di nucleo e la perdita di rame dello statore e produrrà un rumore acustico sul camino alto.
Sebbene un aumento del flusso oltre il valore valutato sia indesiderabile dalla considerazione degli effetti di saturazione, viene anche evitata una diminuzione del flusso per mantenere la capacità di coppia del motore.
Di conseguenza, il controllo della frequenza variabile dell’unità del motore di induzione al di sotto della frequenza nominale viene generalmente effettuato al flusso nominale di gap d’aria da una tensione terminale variabile con la frequenza al fine di mantenere la costante del rapporto (v / f) al valore nominale. Dell’equazione. (6.13)
Dove k è una costante e LS e L ′ sono, rispettivamente, lo statore e lo statore hanno indirizzato le induttanze del rotore. Il segno positivo riguarda il funzionamento dell’automobile e il segno negativo è per l’operazione di frenata.
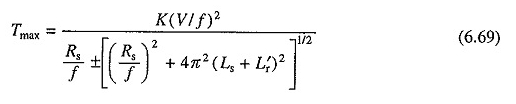
Quando la frequenza non è bassa, (RS / F) ≪ 2π (LS + L ′ R) e quindi, da (6,69)

L’equazione (6.70) suggerisce che con un rapporto costante (V / F), il motore sviluppa una coppia massima costante, tranne a bassa velocità (o frequenze). Il motore funziona quindi in modalità di coppia costante. Secondo l’Eq.
(6.69), per basse frequenze (o basse velocità) dovuta alla caduta di resistenza dello statore [vale a dire quando (RS / F) non è trascurabile rispetto a 2π (LS + L ′ R)] La coppia massima avrà un valore inferiore nel funzionamento del motore (segno -eve) e maggiore valore nel funzionamento del freno (segno -ve).
Questo comportamento è dovuto alla riduzione del flusso durante il funzionamento dell’automobile e all’aumento del flusso durante il funzionamento della frenata. Quando è necessario che la stessa coppia massima sia mantenuta a bassa velocità anche nel funzionamento dell’automobile, il rapporto (V / F) viene aumentato a bassa frequenza.
Ciò provoca un ulteriore aumento della coppia di frenata massima e una notevole saturazione della macchina nel funzionamento della frenata.
Quando hai o raggiungi il valore nominale alla velocità di base, non può essere aumentato con la frequenza. Pertanto, al di sopra della velocità di base, la frequenza viene modificata con costante v. Secondo l’Eq. (6,70), con V mantenuto costante, la coppia massima diminuisce con l’aumento della frequenza (o della velocità).
La variazione della tensione terminale con la frequenza è quindi come mostrato nella Figura 6.33 (a). V è mantenuto costante sopra la velocità di base. Al di sotto del rapporto di velocità di base (V / F) viene mantenuto costante, tranne a bassa frequenza in cui il rapporto (v / f) viene aumentato per mantenere la coppia costante massima.
Le curve di coppia corrispondenti sono rappresentate nella Figura 6.33 (b) sia per le operazioni di manica e frenata. Le curve suggeriscono che il controllo della velocità e l’operazione di frenatura sono disponibili a una velocità di velocità alla velocità della velocità sincrona.

Una determinata coppia si ottiene con una corrente inferiore quando l’operazione a qualsiasi frequenza è limitata tra la velocità sincrona e il punto di coppia massimo, sia per le operazioni automatiche che per la frenata.
Di conseguenza, il funzionamento del motore per ciascuna frequenza è limitato tra la velocità sincrona e il punto di coppia massimo, come mostrato dalle linee complete della Figura 6.33 (b).
Il controllo della frequenza variabile dell’unità del motore a induzione offre buone prestazioni operative e transitorio a causa delle seguenti caratteristiche:
- Il controllo della velocità e il funzionamento di frenata sono disponibili dalla velocità zero alla velocità di base superiore.
- Durante i transitori (avvio -up, frenata e inversione di velocità), l’operazione può essere eseguita con una coppia massima con una corrente ridotta, che fornisce una buona risposta dinamica.
- Le perdite di rame sono basse e l’efficienza e il fattore di potenza sono elevati perché l’operazione è limitata tra la velocità sincrona e il punto di coppia massimo a tutte le frequenze.
- La caduta nella velocità della mancanza di pieno carico è piccola.
Il vantaggio più importante del controllo di controllo della frequenza variabile del motore di induzione è che consente un’unità variabile con una buona funzione operativa e le prestazioni di transizione sopra da un motore a induzione della gabbia di scoiattolo.
Il motore a gabbia scoiattolo ha una serie di vantaggi rispetto a un motore a CC. È economico, robusto, affidabile e più resistente.
A causa dell’assenza di un interruttore e delle spazzole, non richiede praticamente alcuna manutenzione, può essere sfruttato in un ambiente esplosivo e contaminato e può essere progettato per velocità, tensioni e dimensioni energetiche più elevate. Ha anche inerzia, volume e peso inferiori.
Sebbene il costo di un motore a gabbia scoiattolo sia molto più basso rispetto a quello di un motore di corrente continua della stessa nota, il costo complessivo della formazione del motore a induzione del motore, in generale, è più elevato.
Ma a causa dei vantaggi sopra elencati, i lettori del motore a induzione a frequenza variabile sono preferiti ai dischi del motore CC per la maggior parte delle applicazioni.
In applicazioni speciali che richiedono un funzionamento esente da manutenzione, come installazioni sotterranee e sottomarine, nonché in applicazioni che coinvolgono ambienti esplosivi e contaminati, come nelle miniere e nell’industria chimica, i lettori motori con induzione a frequenza variabile sono una scelta naturale.
Hanno diverse altre applicazioni come trazione, tavoli da mulini, acciaierie, pompe, ventilatori, soffiatori, compressori, sputo, vettori, macchine utensili, ecc.
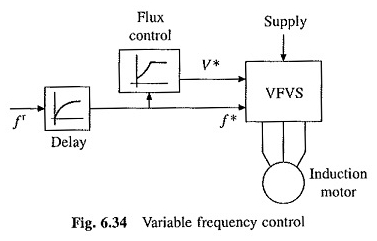
Lo schema a blocchi del controllo di frequenza variabile dello schema di guida del motore di induzione è illustrato nella Figura 6.34. Il motore viene fornito da una fonte di tensione variabile di frequenza variabile (VFV). V * e F * sono controlli di tensione e frequenza per VFV.
Il blocco di controllo del flusso produce un comando di tensione V * per VFVS al fine di mantenere la relazione della Figura 6.33 (a) tra V * e F *. La frequenza di riferimento F * viene modificata alla velocità di controllo.
Viene introdotto un circuito di ritardo tra F * e FR, in modo che anche quando FT viene modificato da una grande quantità, F * cambierà solo lentamente in modo che la velocità del motore possa seguire le variazioni di FT, limitando così il funzionamento del motore per ciascuna frequenza tra la velocità sincrona e il punto di coppia massima. I VFV possono essere un inverter della fonte di tensione o un cicloconverteur.
Speed Speed Control:
Lascia che V e F siano la tensione e la frequenza nominali della macchina. Quando il motore viene utilizzato al di sotto della velocità di base con un controllo costante (v / f), per una frequenza, kf, la tensione terminale sarà KV, dove k è un fattore come 0 ≤ k ≤ 1. Pertanto, quindi, la frequenza è aumentata da 0 a f, k passa da 0 a 1 e che la tensione cambia da 0 a V.
Sostituendo la tensione KV e la frequenza KF e trascurando la caduta di resistenza dello statore, equazioni (6.4) e (6.10)
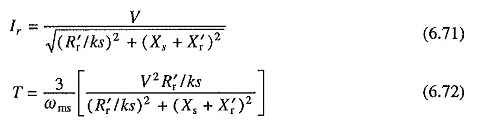
In equazioni. (6.71) e (6.72) se (ks) viene mantenuto costante perché k è vario, la corrente del rotore I’R e la coppia T rimarrà costante. Poiché lo spostamento è piccolo, la R sarà in linea con la tensione. Poiché il flusso è costante, anche l’IM sarà costante. ORA
![]()
Pertanto, se il funzionamento del motore viene effettuato con un valore costante di KS poiché la frequenza è variata, il motore funzionerà su una corrente costante e una coppia. Esaminiamo il significato di KS.
Alla frequenza KF
Nota ωst è la velocità di scorrimento, che è la differenza nella velocità del campo rotante Kωms e la velocità del rotore ωm. È anche la caduta nella velocità del motore del suo carico senza carico, quando la macchina viene caricata.
La discussione sopra mostra. Quello per qualsiasi valore di T, la caduta della velocità del motore dalla sua velocità di carico (Kωms) è la stessa per tutte le frequenze. Pertanto, le caratteristiche della coppia di velocità della macchina per 0
Il funzionamento della macchina a una velocità di scorrimento costante prevede anche il funzionamento a una frequenza costante del rotore come indicato di seguito

dove fr e ωr sono rispettivamente la frequenza del rotore in Hz e rad / sec.
Per s> (xs + x′r), quindi dalle equazioni. (6.72) e (6.73)

Eqn. (6.76) suggerisce che per S
A seconda della discussione sopra, per una velocità di scorrimento, la corrente del motore e la coppia hanno gli stessi valori a tutte le frequenze. Pertanto, la corrente del motore e la coppia possono essere controllate controllando la velocità di scorrimento.
Inoltre, la corrente del motore può essere limitata entro un limite di sicurezza limitando la velocità di scorrimento. Questo comportamento viene utilizzato in un controllo della velocità ad anello chiuso per limitare la corrente entro un limite autorizzato.
Quindi consideriamo l’operazione al di sopra della velocità di base. Come indicato in precedenza, la macchina opera a una tensione costante V.

Poiché la frequenza è maggiore della nota K> 1. Poiché l’operazione è nuovamente limitata tra la velocità sincrona e la coppia massima, lo spostamento ha un valore ridotto, quindi

Pertanto, per velocità al di sopra della velocità di base, a una data e quindi approssimativamente a una donazione, la velocità scorrevole ωsl aumenta linearmente con k (o frequenza). Questo comportamento viene utilizzato in un controllo della velocità ad anello chiuso per limitare la corrente nel valore autorizzato al di sopra della velocità di base.
Poiché lo spostamento è piccolo, la R è in linea con V. Se la perdita della macchina della macchina viene trascurata, la potenza sviluppata è data da
![]()
Pertanto, il PM è costante per un dato, e quindi per un IS. Il lettore funziona quindi in modalità di potenza costante.
Limiti di coppia e di potenza e modalità operative:
Le variazioni della coppia e della potenza per una determinata corrente dello statore e per le frequenze al di sotto e sopra la frequenza nominale sono rappresentate da punti nella Figura 6.35.
Quando la corrente dello statore ha il valore massimo autorizzato, questi rappresenteranno la coppia massima e le capacità di alimentazione del motore nel controllo della frequenza variabile dell’unità del motore di induzione.
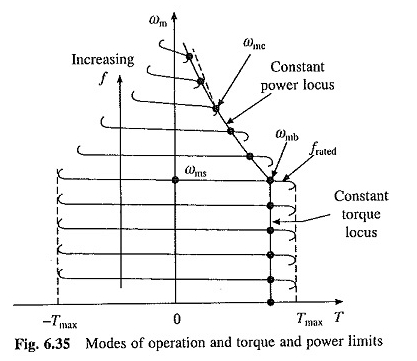
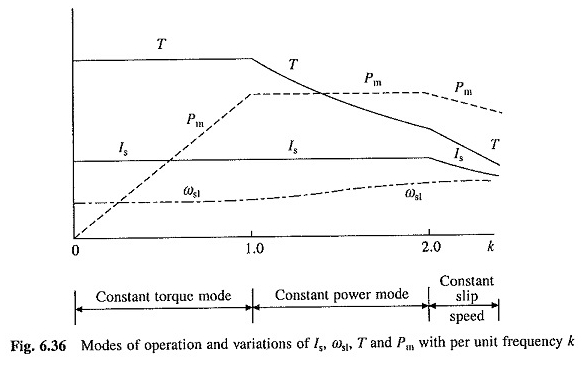
La variazione della coppia massima e delle capacità di potenza con la frequenza è rappresentata nella Figura 6.36. La variazione della velocità di scorrimento ωsl con la frequenza è anche rappresentata in questa figura.
Come mostrato in Fig. 6.35 e 6.36, il motore ha una coppia massima costante da zero a velocità di base ωmm, quindi il lettore funziona in modalità di coppia costante. In questo intervallo di frequenza, V viene modificato con la frequenza come mostrato in FIG.
6.33 (a) e la velocità della corrente massima autorizzata rimane costante. Dalla velocità di base alla velocità ωmc, la potenza massima ha un valore costante, quindi il motore funziona in modalità di potenza costante. A velocità ωmc (Fig. 6.35), viene raggiunta la coppia di guasto.
Qualsiasi tentativo di utilizzare il motore nella corrente massima autorizzata oltre questa velocità manterrà il motore. Di conseguenza, oltre la velocità ωmc, la macchina funziona a una velocità di scorrimento costante e la corrente massima autorizzata e la potenza massima può diminuire (Fig. 6.36).
Ora, la corrente del motore si riduce inversamente con la velocità e la coppia diminuisce inversamente poiché la velocità è quadrata. L’operazione in questa regione è richiesta nei dischi che richiedono un ampio intervallo di velocità ma una coppia bassa ad alta velocità.
Ad esempio, nelle applicazioni di trazione, il lettore funziona in questa regione quando funziona a tutta velocità perché la coppia richiesta in equilibrio ad alta velocità è molto bassa rispetto al suo valore durante l’accelerazione.