Controllo della resistenza del rotore del motore a induzione:
Le curve di velocità di coppia per il controllo della resistenza del rotore del motore a induzione sono riportate nella Figura 6.50. Mentre la coppia massima è indipendente dalla resistenza al rotore, la velocità con cui viene prodotta la coppia massima con la resistenza al rotore. Per la stessa coppia, la velocità diminuisce con un aumento del controllo della resistenza al rotore del motore a induzione.

Il vantaggio di controllare la resistenza del rotore del motore a induzione è che la capacità di coppia del motore rimane invariata anche a bassa velocità. Solo un altro metodo che ha questo vantaggio è un controllo di frequenza variabile.
Tuttavia, il costo del controllo della resistenza al rotore del motore a induzione è molto basso rispetto al controllo della frequenza variabile.
A causa del basso costo e della capacità di coppia rialzata ad alta velocità, il controllo della resistenza del rotore viene utilizzato nelle gru, i giocatori di Ward Leonard Ilgener e altre applicazioni di carico intermittente.
Un grande svantaggio è una bassa efficienza a causa di ulteriori perdite nella resistenza collegata nel circuito del rotore. Man mano che le perdite si svolgono principalmente nella resistenza esterna, non sfuggono al motore.
Metodi convenzionali:
Numerosi metodi vengono utilizzati per ottenere resistenza variabile. Nei controller del tamburo, la resistenza varia usando gli interruttori rotanti e la resistenza divisa in alcuni passaggi. La resistenza variabile può anche essere ottenuta utilizzando contattori seriali e resistori.
Le applicazioni ad alta potenza utilizzano un regolatore scorrevole, che consiste in tre elettrodi immersi in un elettrolita, composto da acqua salina. La resistenza varia modificando la distanza tra gli elettrodi e l’elettrodo terreno.
Quando l’alimentazione è alta, gli elettrodi sono guidati da un piccolo motore. Il vantaggio di questo metodo è che la resistenza può essere modificata senza passo.
Controllo della resistenza al rotore statico:
La resistenza al rotore può anche essere variata senza passo usando il circuito nella Figura 6.51. La tensione di uscita del rotore del rotore viene rettificata da un ponte a diodo e fornita con una combinazione parallela di una Resistenza fissa R e un interruttore a semiconduttore realizzato da un transistor TR (Fig. 6.51).
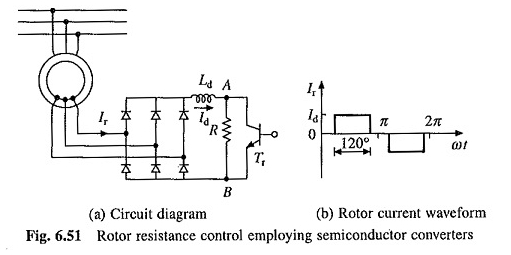
Il valore effettivo della resistenza tra i terminali A e B, Rab, è variato da un rapporto di servizio variabile del transistor TR, che a sua volta varia la resistenza al circuito del rotore. L’induttanza LD viene aggiunta per ridurre l’ondata e la discontinuità nell’attuale collegamento CC.
Verrà indicata la forma d’onda della corrente del rotore. Nella Figura 6.5104 quando l’increspatura viene trascurata. Pertanto, la corrente del rotore RMS sarà

La resistenza tra i terminali A e B è zero quando il transistor è acceso e sarà R quando viene estinto. Di conseguenza, è dato il valore medio della resistenza tra i terminali
![]()
dove Δ è il rapporto di servizio del transistor ed è dato dall’equazione. (5.112).
Il potere consumato da Rab è
![]()
Equazioni. (6.88) e (6.89), il potere consumato da Rab per fase è

L’equazione (6,90) suggerisce che la resistenza al circuito del rotore per fase è aumentata di 0,5R (1 – δ). Pertanto, la resistenza totale del circuito del rotore per fase sarà ora

RRT può essere variato da RR a (RR + 0,5R) perché Δ è passato da 1 a 0.
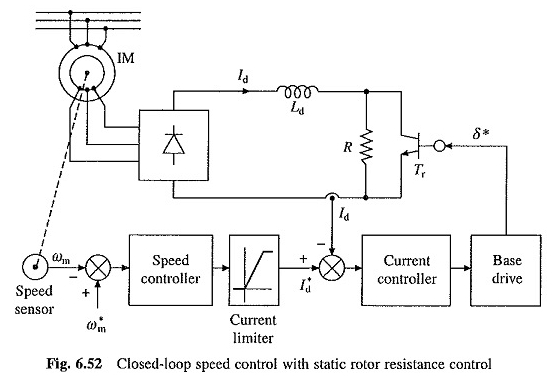
Un diagramma di controllo della velocità ad anello chiuso con il ciclo di controllo della corrente interna è illustrato nella Figura 6.52. Rotore IR corrente e quindi l’ID ha un valore costante nel punto di coppia massimo, sia durante il motore che nella spina.
Se il limitatore di corrente viene fatto saturare a questa corrente, il lettore accelererà e decelererà la coppia massima, dando una risposta di transizione molto rapida. Affinché si verifichi il collegamento, la disposizione deve essere presa per l’inversione della sequenza di fase.
Rispetto al controllo convenzionale della resistenza al rotore del motore a induzione, il controllo della resistenza al rotore statico presenta diversi vantaggi come liscio e senza gradino, la risposta rapida, meno manutenzione, dimensioni compatte, semplice controllo a circuito chiuso e resistenza al rotore rimane bilanciata tra le tre fasi per tutti i punti operativi.