Controllo dell’inverter della fonte di tensione del motore a induzione:
La frequenza variabile e l’alimentazione a tensione variabile per il controllo del motore a induzione possono essere ottenuti da un inverter di tensione SID (VSI) o cicloconvelatore. Il controllo dell’inverter della fonte di tensione del motore a induzione è descritto qui e la formazione alimentata dai cicloconverter.
Drive del motore a induzione VSI:
Il controllo della sorgente di tensione del motore di induzione consente di ottenere un alimentatore a frequenza variabile da un alimentatore DC. La Figura 6.37 (a) mostra un VSI usando transistor. Qualsiasi altro dispositivo auto-demotico può essere utilizzato al posto di un transistor.
Generalmente, il MOSFET viene utilizzato in inverter a bassa tensione e a bassa potenza, l’IGET (transistor bipolare con la porta isolata) e i transistor di potenza sono usati fino ai livelli di potenza medi e il GTO (gate gira il tiristore) e l’IGCT (tirista alla porta isolata) sono usati per livelli di alto livello.

Il controllo dell’inverter di tensione del motore di induzione può essere utilizzato come inverter di onde di scaffale o larghezza dell’impulso (PWM).
Quando operano come inverter ad onda di diffusione, i transistor vengono trasferiti nella sequenza del loro numero con una differenza di tempo T / 6 e ogni transistor viene mantenuto durante la durata t / 2, dove T è il periodo di tempo per un ciclo. L’onda di tensione della linea risultante è rappresentata in FIG.
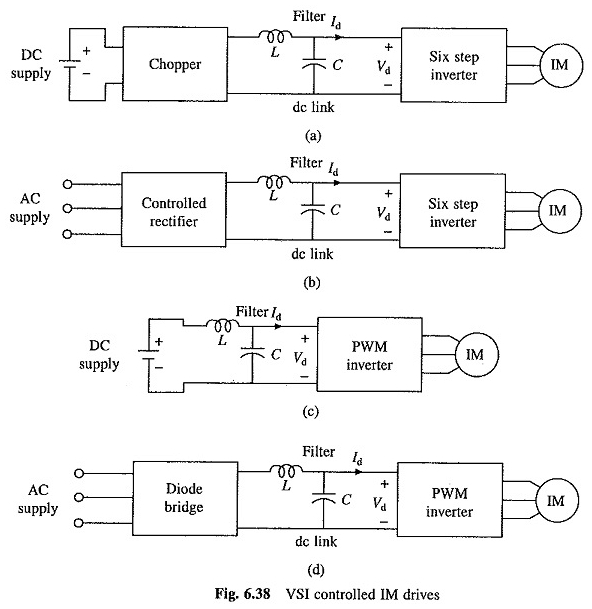
6.37 (b). La frequenza del funzionamento dell’inverter è variata variando T e la tensione di uscita dell’inverter è variata variando la tensione di ingresso CC variabile. Quando l’alimentazione è DC, la tensione di ingresso CC variabile viene ottenuta collegando un elicottero tra la potenza continua e l’inverter (Fig. 6.38 (a)).
Quando l’alimentazione è AC, la tensione di ingresso CC variabile viene ottenuta collegando un raddrizzatore controllato tra la potenza CA e l’inverter (Fig. 6.38 (b)).
Un grande condensatore di filtro elettrolitico C è collegato nel collegamento CC per effettuare il funzionamento del raddrizzatore o dell’inverter di Chopper e per filtrare le armoniche nella tensione di connessione CC.
L’output dell’inverter e le tensioni di fase sono fornite dalla seguente serie di Fourier:


Il valore RMS della tensione di fase fondamentale

La coppia per una determinata velocità può essere calcolata considerando solo la componente fondamentale. Lo svantaggio principale dell’inverter di onde impermeabili sono le grandi armoniche a bassa frequenza nella tensione di uscita.
Di conseguenza, un motore a induzione da un inverter ad onda di diffusione soffre dei seguenti svantaggi:
- A causa delle armoniche a bassa frequenza, le perdite del motore sono aumentate a tutte le velocità causando il restringimento del motore.
- Il motore sviluppa coppie pulsanti a causa della quinta, settima, undicesima e tredicesima armonica che causano un movimento a scatti del rotore a bassa velocità.
- Il contenuto armonico nella corrente del motore aumenta a bassa velocità. La macchina satura di carichi leggeri a bassa velocità a causa dell’elevato rapporto (VLF). Questi due effetti surriscaldano la macchina a bassa velocità, limitando così la velocità più bassa a circa il 40% della velocità di base.
Le armoniche sono ridotte, le armoniche a bassa frequenza vengono eliminate, le perdite associate vengono ridotte e il movimento regolare viene ottenuto a bassa velocità anche quando l’inverter viene lavorato come inverter modulato dalla larghezza dell’impulso. Fico.
6.37 (c) mostra la forma dell’onda di tensione di uscita per la modulazione sinusoidale della larghezza dell’impulso.
Poiché la tensione di uscita può ora essere controllata mediante modulazione della larghezza dell’impulso, non è necessaria alcuna disposizione per la variazione nella tensione CC di ingresso, l’inverter può quindi essere collegato direttamente quando l’alimentazione è DC [FIG. 6.38 (c)] e tramite un raddrizzatore del diodo quando l’alimentazione è AC. [Fico. 6.38 (d)].
La componente fondamentale della tensione della fase di uscita di un inverter PWM che opera con PWM sinusoidale è data da

Dov’è l’indice di modulazione.
Le armoniche di corrente del motore producono una pulsazione di coppia e richiedono il motore. Per un contenuto armonico indicato nel controllo del terminale motorio, le attuali armoniche vengono ridotte quando il motore ha un’induttanza di perdita più elevata, che riduce le pulsazioni di restringimento e coppia.
Di conseguenza, se utilizzato dall’inverter dell’inverter della fonte di tensione del motore di induzione con induttanza di perdite significative (rispetto all’alimentazione nell’alimentazione sinusoidale).
Frequenzio e funzionamento multiquadrant dell’addestramento motorio del motore:
L’alimentazione nel motore è dato da
![]()
O
V = componente fondamentale della tensione della fase motoria
Est = componente fondamentale della corrente di fase motoria
Φ = angolo di fase tra V ed IS.
Nel funzionamento dell’automobile φ <90 °, il pin è quindi positivo, vale a dire i flussi di potenza dell'inverter alla macchina. Una riduzione della frequenza rende una velocità sincrona inferiore alla velocità del rotore e la velocità relativa tra i driver del rotore e il campo d'aria rotante.
Ciò inverte l’EMF induce dal rotore, dalla corrente del rotore e dal componente della corrente dello statore che bilancia le curve del rotore del rotore. Di conseguenza, l’angolo φ diventa maggiore di 90 ° e il flusso di potenza viene invertito.
La macchina funziona come alimentatore generatore nell’inverter, che a sua volta alimenta l’alimentazione in CC invertendo l’ID corrente del collegamento CC.
La frenata rigenerativa si ottiene quando la potenza che scorre dall’inverter al collegamento CC viene utilizzata utilmente e la frenata dinamica si ottiene quando viene sprecata in una resistenza.
Frenata dinamica:
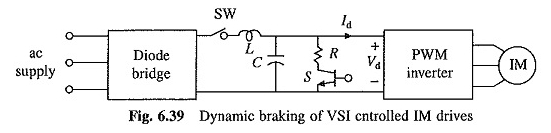
Consideriamo prima la frenata dinamica dell’inverter modulato dalla larghezza dell’impulso della Figura 6.38 (d). Con la frenata dinamica, il lettore sarà mostrato nella Figura 6.39.
Per la frenata dinamica, l’interruttore SW e un interruttore auto-commerciale (qui transistor) in serie con una resistenza di frenatura RB collegata al collegamento CC vengono aggiunti al lettore nella Figura 6.38 (d). Quando il funzionamento del motore è passata dall’autostrada all’interruttore di frenata, SW è aperto.
L’energia generata che scorre nel collegamento CC carica il condensatore e le sue tensioni aumentano. Quando attraversa un valore definito, l’interruttore si è chiuso, collegando la resistenza attraverso il collegamento.
L’energia generata e parte dell’energia immagazzinata nel condensatore scorre nella resistenza e la tensione di legame CC si è ridotta. Quando cade al suo valore nominale, è aperto.
Pertanto, chiudendo e aprendo gli switch in funzione del valore della tensione di legame CC, l’energia generata viene dissipata nella resistenza, dando una frenata dinamica. L’operazione di frenatura dinamica dei dischi Fig. 6.38 da (a) a (c) può essere ottenuto in modo simile.
Frenata rigenerativa:
Consideriamo prima la frenata rigenerativa dell’allenamento ondulato modulato dalla larghezza dell’impulso (PWM) di Fig. 6.38 (c) e (D). Nel lettore di Fig. 6.38 (c), quando il funzionamento della macchina passa dall’automobile alla frenata, l’ID inverte e scorre nell’energia di alimentazione dell’alimentazione CC alla fonte.
Pertanto, il lettore nella Figura 6.38 (c) ha già una capacità di frenatura rigenerativa. In caso di addestramento nella Figura 6.38 (d), per la frenata rigenerativa, l’alimentazione al collegamento CC deve essere trasferito in potenza CA.
Quando l’operazione passa dall’automobile alla frenata ID inverte, ma VD rimane nella stessa direzione. Pertanto, per la capacità di frenatura rigenerativa, è necessario un convertitore in grado di gestire la tensione di corrente continua di una polarità e una corrente CC di una o l’altra direzione.
Un doppio convertitore ha questa capacità ed è stato utilizzato in passato. I recenti dischi usano il convertitore di collegamento sincrono (SLC) perché porta una corrente sinusoidale al fattore di potenza della sorgente della sorgente CA, sia durante le operazioni di guida che frenante.
Pertanto, sebbene le sue prestazioni siano più elevate, richiede meno dispositivi rispetto a un doppio convertitore. Il principio della sua operazione è spiegato qui.
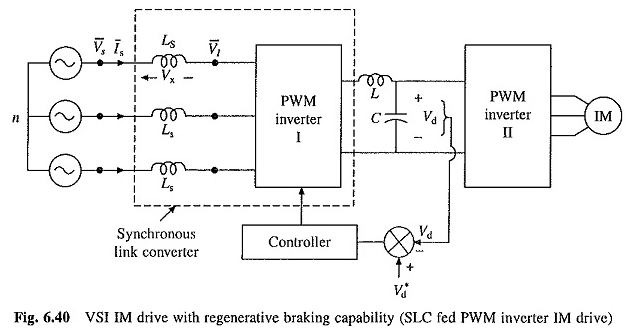
Un lettore rigenerativo con SLC e inverter PWM è illustrato nella Figura 6.40. Gli indutti LS e PWM costituiscono un SLC.
L’inverter PWM viene utilizzato per produrre una tensione VI dell’ampiezza e della fase richiesta e con un basso contenuto armonico, in modo che la corrente di origine sia quasi sinusoidale e in fase con VS per l’autorizzazione e la fase esclusa a 180 ° per la frenata, dando così un fattore di potenza dell’unità.
I diagrammi di fase sono rappresentati nelle Figg. 6.41 (a) e (b). Per ciascuno è valore, è richiesto V1 della fase e della grandezza data. Questo può essere facilmente fatto nella modulazione sinusoidale della larghezza dell’impulso (PWM).
Nella magnitudine PWM sinusoidale e fase di V1 dipende dall’ampiezza e dalla fase del segnale di modulazione [1]. Di conseguenza, V1 della fase e della grandezza data può essere prodotto producendo un segnale di modifica dell’ampiezza e della fase richiesta.
Poiché VI è prodotto dall’inverter PWM, non contiene armoniche a bassa frequenza. L’induttanza LS filtra armoniche ad alta frequenza per produrre una corrente di fonte quasi sinusoidale è. I diagrammi di fase nella Figura 6.41 sono simili a quelli di una macchina sincrona.
Pertanto, il comportamento del convertitore di collegamento sincrono è simile a quello di una macchina sincrona, è quindi chiamato convertitore di collegamento sincrono.

Quando il lettore in Fig. 6.40 funziona in equilibrio, la fornitura fornita (socket) da SLC deve essere uguale all’elettricità assunta (fornita) dall’inverter PWM II. Poiché i due operano indipendentemente l’uno dall’altro, questo viene eseguito fornendo un controllo a circuito chiuso della tensione di connessione CC.
Quando l’offerta fornita da SLC al collegamento CC è uguale alla potenza assunta da PWM Inverter II, nessuna energia verrà fornita o presa dal condensatore C e la sua tensione sarà costante ed uguale al valore di riferimento VD *.
Se ora il carico sull’IM viene aumentato, la potenza effettuata dall’inverter PWM II dal collegamento DC sarà superiore alla potenza fornita dalla SLC. Pertanto, la tensione del condensatore VD scenderà al di sotto del suo valore di riferimento VD *.
Il controllo della tensione ad anello chiuso aumenterà il valore IS e quindi l’alimentazione al collegamento CC. Di conseguenza, la tensione di collegamento CC sarà ridotta al valore di riferimento.
Poiché SLC lavora come un convertitore di boost, il controllo a circuito chiuso della tensione di collegamento CC offre al lettore una capacità di guida contro una tensione e una tensione.
Quando la tensione della sorgente CA diminuisce, il controllo della tensione ad anello chiuso mantiene la costante di tensione di legame CC per aumentare l’IS e quindi il motore continua a ricevere una tensione costante e quindi produce la stessa potenza e la stessa coppia massima.
Il lettore nella Figura 6.38 (b) può avere una capacità di frenatura rigenerativa sostituendo il raddrizzatore controllato da un doppio convertitore. La SLC non può essere utilizzata perché richiede una tensione di legame CC costante, mentre la tensione di collegamento CC con sei fasi deve essere variata.
Il lettore nella Figura 6.38 (a) avrà una capacità di frenatura rigenerativa se viene utilizzato un elicottero a due quadranti nella Figura 5.44 (in grado di fornire una tensione di una polarità e corrente in entrambe le direzioni).
Quattro operazioni di quadrante:
Quattro funzionamenti del quadrante possono essere ottenuti da qualsiasi azionamento con una capacità di frenatura (rigenerativa o dinamica). Una riduzione della frequenza dell’inverter, per rendere la velocità sincrona inferiore alla velocità del motore, trasferisce il funzionamento del quadrante I (automobile in avanti) a II (frenata anteriore).
La frequenza e la tensione dell’inverter vengono gradualmente ridotte quando la velocità cade per rallentare la macchina a velocità zero.
Ora, la sequenza di fase della tensione di uscita dell’inverter viene invertita scambiando gli impulsi stanchi tra gli interruttori a due gamba dell’inverter, ad esempio tra le coppie (TRL, TR4) e (TR3 e TR6) nella Figura 6.37 (a).
Questo trasferisce il funzionamento del quadrante HI (inversa motore). La frequenza e la tensione dell’inverter sono aumentate per ottenere la velocità richiesta nella direzione opposta.