Controllo della velocità del motore a induzione:
Il controllo senza passo nella velocità dei motori a induzione non può essere effettuato in modo efficace e a basso costo come per i motori DC. Vari metodi di controllo del motore a induzione possono essere visualizzati considerando l’equazione di velocità
![]()
Da questa equazione vediamo che esistono due metodi di base per il controllo della velocità del motore di induzione, vale a dire
- Controllare lo slittamento per una velocità sincrona fissa e
- Controllo della velocità sincrono.
Da

Esistono due modi per controllare la velocità sincrona: il controllo della frequenza di alimentazione e del controllo degli stator. Quest’ultimo metodo fornisce un controllo dei passaggi perché i poli possono essere modificati in diversi due. Il cambio di posta viene effettuato solo in un motore a gabbia scoiattolo e anche per due fasi.
Controllo della tensione:
È un metodo di controllo scorrevole con una tensione di frequenza costante variabile fornita allo statore del motore. Ovviamente, la tensione dovrebbe essere ridotta solo sotto il valore nominale.
Per un motore che opera a uno spostamento a pieno carico, se lo spostamento deve essere raddoppiato per una coppia di carico costante, segue dalle equazioni (9.34) e (9.35) che la tensione deve essere ridotta di un fattore di 1 / √2 e che la corrente corrispondente (I’2) aumenta a √2 del valore di carico completo.
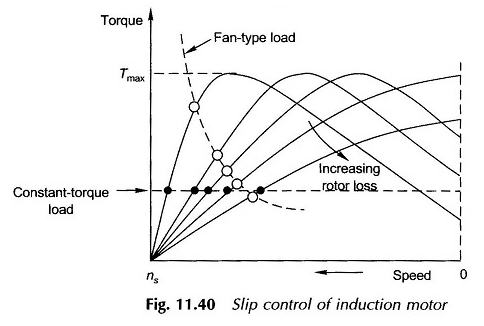
Il motore tende quindi a surriscaldarsi. Il metodo non è quindi adatto per il controllo della velocità. Ha un uso limitato per i motori con conseguenti carichi di tipo ventilatore le cui esigenze di coppia sono proporzionali alla velocità di velocità (vedi Fig. 11.40).
Questo è un metodo comunemente usato per i ventilatori a soffitto addestrati da motori a induzione monofase che hanno una grande impedenza di arresto che limita la corrente disegnata dallo statore.
Controllo della resistenza al rotore:
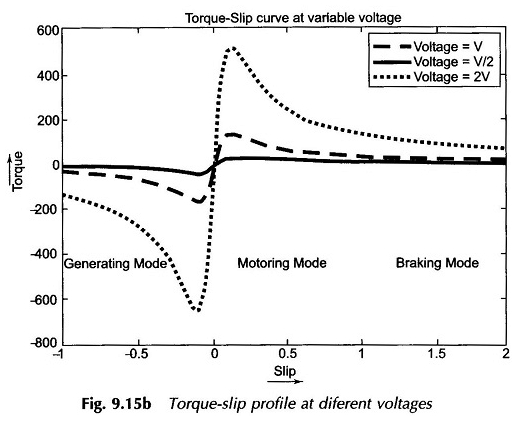
Come suggerisce il nome, questo tipo di controllo della velocità è possibile solo per i motori a induzione dell’anello. Si vede facilmente riferendosi alla Figura 9.15 che quando aumenta la resistenza del rotore, lo spostamento del motore aumenta (cadute di velocità) per una coppia di carico fisso.
La corrente dello statore varia in misura limitata perché l’effetto delle variazioni dalla resistenza allo scorrimento e il rotore tende a annullare (riferendosi all’equazione (9.34)) per piccoli valori di scorrimento. La potenza di input aumenta, tuttavia. Ciò prevede la potenza persa in ulteriore resistenza al rotore.
L’efficienza del motore operativo, ovviamente, diminuisce nettamente. Questo metodo di controllo della velocità in quanto tale è quindi adottato per un intervallo di velocità ristretta e generalmente per un’operazione a breve termine.

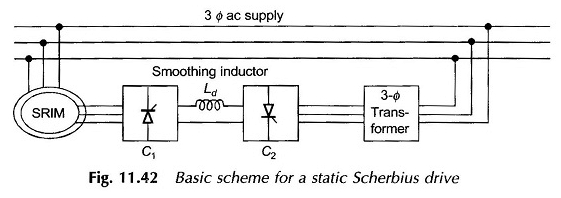
L’efficacia di questo tipo di diagramma di controllo della velocità può essere migliorata restituendo la potenza del rotore meccanicamente sull’albero del rotore o elettricamente al settore. Il primo diagramma può essere implementato da un raddrizzatore e un motore a corrente continua accoppiato con l’albero del rotore.
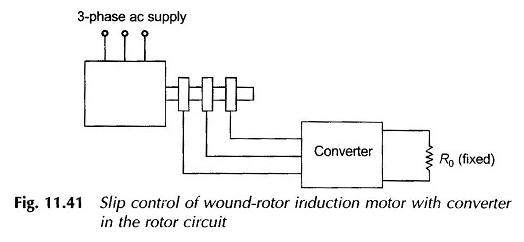
Il secondo diagramma richiede un convertitore di frequenza che converte l’alimentazione a frequenza variabile in una frequenza fissa (alimentazione) per ridurre l’energia elettrica al settore. Questi motivi possono essere progettati dai circuiti SCR (vedi Figure 11.41 e 11.42).
È possibile raggiungere velocità supersincroni iniettando la potenza alla frequenza appropriata nel rotore mediante una fonte di frequenza regolabile.
Possiamo vedere che è proprio l’opposto aggiungere una resistenza al rotore in cui la potenza viene presa dal rotore (e sprecata in una resistenza esterna).
Una vasta gamma di controllo di velocità sopra e sotto è sincrona è possibile includendo l’attrezzatura di conversione di frequenza nel circuito del rotore.
Controllo della frequenza:
La velocità del motore di induzione sincrono può essere controllata in un passaggio senza una vasta gamma modificando la frequenza di alimentazione. Secondo l’equazione. (9.1) Il flusso di aria-uomo risultante dal polo è dato da


Di conseguenza, al fine di evitare la saturazione di nuclei dello statore e del rotore che causerebbe un elevato aumento della corrente di magnetizzazione, il flusso φR deve essere mantenuto costante perché F è variato. Per raggiungere questo obiettivo, segue dall’equazione.
(9.81) che quando F è vario, V deve anche essere variato in modo tale che (v / f) rimanga costante. L’alimentazione variabile (V, F) della potenza costante (V, F) può essere organizzata dal layout della lezione del convertitore illustrata schematicamente nella Figura 9.49 (a) che utilizza i circuiti SCR. La Figura 9.49 (b) mostra uno schema di controllo della velocità alternativo utilizzando un convertitore e un motore CC (shunt).

L’attrazione principale dell’uso del motore a induzione per il controllo della velocità è la sua robustezza, il suo basso costo e la sua manutenzione senza manutenzione rispetto al motore CC.
A causa del costo dell’inverter coinvolto nello schema di controllo della velocità del motore di induzione, il diagramma del motore a corrente continua è più economico.
Tuttavia, lo schema del motore a induzione è un solido candidato per il controllo della velocità e dovrebbe subentrare nel prossimo futuro con un miglioramento e una riduzione della tecnologia CCR aggiuntiva.