Controllo della velocità del motore a induzione trifase:
Il problema del controllo della velocità del motore a induzione a tre fasi in particolare è di grande importanza pratica.
In un certo numero di settori, i motori devono soddisfare requisiti caratteristici molto rigidi, sia per quanto riguarda la gamma e la dolcezza del controllo e anche per quanto riguarda il funzionamento economico.
Dal punto di vista dalla vista della velocità delle caratteristiche del motore a induzione a tre fasi, i motori a induzione sono inferiori ai motori DC.
La velocità di un motore CC shunt può essere regolata tra una vasta gamma con una buona efficienza e una buona regolazione della velocità, ma nei motori a induzione, la velocità non può essere variata senza perdere efficienza e una buona regolamentazione della velocità.
La velocità di un motore a induzione è data dall’espressione

Pertanto, ci sono tre fattori, vale a dire la frequenza di potenza F, il numero di PLE Pôles P e il slisement S da cui dipende la velocità di un motore a induzione. Pertanto, per cambiare la velocità di un motore a induzione, è essenziale modificare almeno uno dei tre fattori sopra.
I metodi di controllo della velocità del motore a induzione a tre fasi si distinguono a seconda dell’azione principale sul motore: (i) sul lato dello statore e (ii) sul lato del rotore.
Vari metodi di controllo della velocità del motore a induzione a tre fasi sul lato dello statore sono (a) la variazione della frequenza di alimentazione (b) la variazione della tensione applicata e (c) modificando il numero di poli.
Sul lato del rotore, la velocità può essere controllata (a) modificando la resistenza nel circuito del rotore e (b) introducendo nel circuito del rotore un EMF aggiuntivo della stessa frequenza dell’EMF fondamentale del rotore.
Per quest’ultimo metodo di controllo del motore a induzione a tre fasi, sono necessarie una macchina elettrica aggiuntiva o più di queste macchine.
Un set composto da un motore a induzione regolato e una o più macchine elettriche aggiuntive che sono collegate ad esso elettricamente o meccanicamente è chiamata cascata. Le macchine degli interruttori sono comunemente usate come macchine aggiuntive.
1. Controllo della velocità per variazione nella frequenza di alimentazione
Questo metodo di controllo del motore a induzione a tre fasi fornisce un intervallo di controllo ad ampio velocità con una variazione progressiva di velocità in questa spiaggia. La principale difficoltà con questo metodo è come ottenere la dieta in frequenza variabile.
L’apparecchiatura ausiliaria richiesta a tale scopo porta a un primo costo elevato, aumento della manutenzione e un calo dell’efficienza complessiva. Questo è il motivo per cui questo metodo non viene utilizzato per le applicazioni di controllo della velocità per uso generale.
Nonostante il fatto che questo diagramma sia complicato, ci sono alcune applicazioni in cui la sua vasta gamma di velocità e una buona regolamentazione della velocità rendono permanentemente molto desiderabile.
Se un motore a induzione deve funzionare a frequenze diverse con valori praticamente costanti di efficienza, fattore di potenza, capacità di sovraccarico e uno spostamento assoluto costante, quindi, con ferro insaturo, è essenziale che la tensione di alimentazione sia varia in proporzione alla frequenza dell’alimentazione.
Questo tipo di variazione può verificarsi, ad esempio, se il generatore di energia è soggetto a variazioni di velocità, a causa di sovraccarichi momentanei o a causa di una significativa regolazione della velocità. La tensione e la frequenza di uscita variano sia come velocità se non viene fornita alcuna correzione automatica.
Su alcuni grandi addestramento marino, i motori dell’elica sono del tipo di induzione e sono controllati a velocità da tale alimentazione locale che è fornita da generatori sincroni accoppiati con turbine a velocità variabile.
Anche in tali casi, l’intervallo di variazione della velocità è limitato, poiché l’efficacia dei motori principali diminuisce rapidamente con il cambio di velocità rispetto a quello che sono progettati.
Le curve di velocità tipiche di velocità per quattro diverse frequenze sono rappresentate nella Figura 1.25.

2. Controllo della velocità per variazione nella tensione di alimentazione
È un metodo di controllo scorrevole con una tensione di alimentazione a frequenza costante variabile. In questo metodo di controllo della velocità dei motori a induzione, la tensione applicata allo statore è variata per variare la velocità.
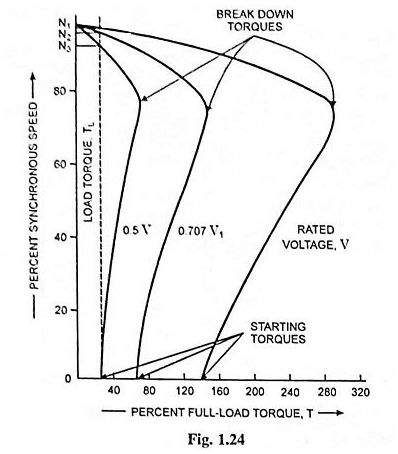
This Method of Speed Control of Three Phase Induction Motor is Simple, Low in First Cost and has long maintenance cost it has limited use because the operation at Voltages exceeding rated voltage is restricted by magnetic saturation, (ii) a large change in voltage (III) The Developed Torque Reduces Greatly With The Reduction in Supply Voltage and the Motor Come To Standstill If the Load Torque Exceds The Pull-Out The engine torque corresponding to a reduced power tension and (Iv) L’intervallo di controllo della velocità è molto limitato nella direzione in basso, vale a dire la velocità nominale alle velocità più basse.
In generale, questo metodo di controllo del motore a induzione a tre fasi viene utilizzato solo su carichi in cui la coppia richiesta diminuisce considerevolmente poiché la velocità è ridotta, come con i piccoli motori a gabbia scoiattolo che guidano i ventilatori.
La tensione variabile può essere ottenuta mediante reattori saturi, vari o trasformatori con un cambio di spostamento.
Le caratteristiche di accelerazione con tensioni ridotte sono illustrate nella Figura 1.24.
3. Controllo della velocità modificando il numero di poli
Questo metodo è facilmente applicabile ai motori a gabbia scoiattolo perché un avvolgimento in gabbia reagisce automaticamente per creare lo stesso numero di poli dello statore.
Questo metodo di controllo del motore a induzione a tre fasi non è generalmente possibile con i motori delle radici delle ferite come in queste macchine, questo metodo implicherebbe notevoli complicanze della progettazione e della commutazione, poiché le interconnessioni di primaria e secondaria dovrebbero essere modificate simultaneamente in modo da produrre lo stesso numero di poli nei due avvolgimenti. Altrimenti, una coppia negativa sarà sviluppata da alcune cinture del driver del rotore.
Il numero di coppie di poli nello statore può essere modificato come segue:
(a) Utilizzando diversi avvolgimenti dello statore: in questo metodo di controllo del motore a induzione a tre fasi, due o più avvolgimenti indipendenti, ogni lesione per un numero diverso di poli, sono collocati nelle stesse slot machine. Il numero di pali di avvolgimento dello statore è in questo
In nessun caso interdipendentemente collegato e non può essere scelto arbitrariamente in base alle condizioni operative di questo motore.
Ad esempio, un motore a due velocità può avere due avvolgimenti dello statore, un infortunio per 4 pali e un altro per 6 poli che forniranno velocità sincroni di 1.500 giri / min e 1000 giri / min con una frequenza di potenza di 50 Hz.
A volte anche i motori con quattro avvolgimenti di statore indipendenti vengono utilizzati e danno quattro velocità sincroni (e quindi in esecuzione). Naturalmente, un avvolgimento viene utilizzato allo stesso tempo, gli altri sono completamente inefficaci.
La variazione da una velocità all’altra può essere effettuata da un interruttore meccanico o da contattori. Con tale disposizione, avvolgimento o avvolgimenti che non sono utilizzati devono essere mantenuti aperti dall’interruttore o almeno lasciati in una stella.
Altrimenti, a causa dell’azione del trasformatore, l’avvolgimento che è collegato al cibo indurrebbe tensioni nell’avvolgimento inattivo e causerebbe il surriscaldamento a causa delle seguenti correnti circolanti.
Il regolamento stesso è equivalente alla modifica della velocità del motore in passaggi, poiché l’uno o l’altro avvolgimento dello statore è collegato al settore dell’energia.
Con ogni cambiamento, il motore è in condizioni essenzialmente simile alle condizioni di partenza, vale a dire una corrente significativa e una coppia ridotta. A causa di driver inattivi, questo metodo di cambio di post richiede un grande statore che un motore a una singola velocità della stessa nota.
Questo metodo è stato utilizzato per motori ascensori, motori di trazione e anche per piccoli motori per guidare le macchine utensili.
(b) Metodo del polo sostanziale: il metodo di cambiamento del polo per il controllo della velocità del motore di induzione trifase descritto sopra in (a) IE, il metodo di avvolgimento dello statore multiplo, viene utilizzato solo in piccoli motori.
Nei motori di grandi dimensioni, è più appropriato utilizzare una tecnica polare sostanziale che elimina la necessità di avere diversi avvolgimenti dello statore per modificare il numero di centri di statore.
Questo metodo di controllo del motore a induzione a tre fasi utilizza l’intero avvolgimento per ogni velocità. Normalmente, per un motore a velocità singola, i successivi gruppi di bobine vengono arrotolati per creare centri di polarità in successione. Ciò è illustrato nella Figura 1.83, in cui viene sviluppata una fase di un avvolgimento a quattro punti.
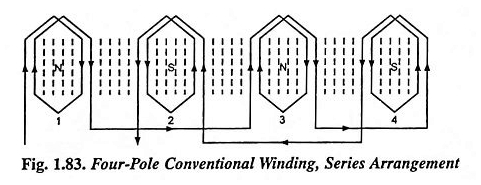
Va notato che tutte le bobine sono in serie, ma che le connessioni finali sono stabilite a gruppi alternativi, vale a dire, il gruppo 1 nel gruppo 3 e nel gruppo 4 nel gruppo 2.
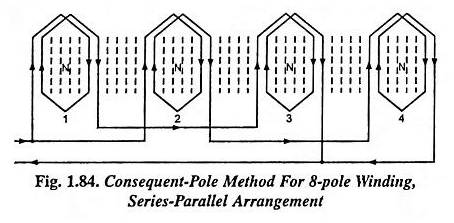
Ora, le connessioni finali dei gruppi, con le stesse bobine, possono essere modificate in modo da avere bobine successive della stessa polarità, come illustrato nella Figura 1.84.
Parallelamente alle connessioni della serie dei gruppi 2-4 con questi gruppi 1-3, la polarità dei gruppi 2 e 4 è cambiata, in modo che ora ci siano quattro poli successivi settentrionali.
Come risultato di questi poli meridionali vengono creati tra ciascuno dei poli settentrionali e il motore ora ha un avvolgimento a 8 poli.
Pertanto, per un alimentatore da 50 Hz, la disposizione della serie fornisce una velocità sincrona di 1.500 giri / min mentre la disposizione della serie Parrale fornisce una velocità sincrona di 750 giri / min.
È anche possibile utilizzare una disposizione parallela seriale per l’avvolgimento a 4 poli, quindi spostarsi sulla serie per l’avvolgimento a 8 poli. Un circuito per cambiare un avvolgimento a tre fasi dell’avvolgimento di 2 a 4 post è illustrato nella Figura 1.85.
Ricordando tutti i gruppi di bobine per la stessa polarità, lo statore agisce come se avesse il doppio dei poli rispetto ai gruppi di poli. I poli aggiuntivi così creati sono chiamati poli sostanziali e l’avvolgimento è noto come un avvolgimento post consecutivo.
Con una singola disposizione di commutazione, è possibile avere la connessione standard (o convenzionale) su un lato di un doppio interruttore di lancio e la connessione del post sostanziale sull’altro lato dell’interruttore.
Pertanto, è possibile ottenere due velocità, una velocità più elevata con connessione convenzionale e mezzo stampare con una connessione sostanziale per polo.

Nei motori che utilizzano la tecnica del polo sostanziale per il controllo della velocità, il miglior design possibile non è generalmente ottenuto a entrambe le velocità.
In altre parole, le caratteristiche desiderabili, come l’elevato fattore di potenza, vengono sacrificate a una velocità in modo che si ottenga un fattore di potenza ragionevolmente buono all’altra velocità.
A volte le connessioni dello statore sono passate da Delta a protagonista contemporaneamente alle connessioni Post modificate. Ciò cambia la tensione e rende un motore migliore possibile ad ogni velocità.
I motori a due velocità sono generalmente fabbricati con un avvolgimento sullo statore, il numero di poli modificati nel rapporto 1: 2. I motori a tre e quattro velocità sono dotati di due avvolgimenti sulle statistiche, uno o entrambi sono fabbricati modificando il numero di poli.
Ad esempio, se si desidera ottenere un motore per quattro velocità sincroni; 1500, 1.000, 750 e 500 giri / min, due avvolgimenti devono essere posizionati sullo statore, uno dei quali dando 4 e 8 pali e l’altro dando 6 e 12 poli.
Utilizzando una connessione parallela in una serie di singoli gruppi di fase, le fasi possono essere collegate in stella / delta, che porta a un funzionamento a due velocità con i tre tipi di caratteristiche di velocità di coppia, vale a dire una coppia costante, una potenza costante e una coppia variabile.
A causa delle complicazioni nella progettazione e nella commutazione dell’avvolgimento dello statore, non è possibile ottenere più di quattro velocità per qualsiasi motore grazie a questo metodo di controllo della velocità. Anche questo metodo non fornisce un controllo progressivo della velocità.
Questo è il motivo per cui questo metodo non viene utilizzato per le applicazioni di controllo della velocità per uso generale.
Tuttavia, questo metodo è molto soddisfacente per le applicazioni, come ventilatori di ventilazione, trasportatori, macchine utensili o altre applicazioni che richiedono solo due o quattro operazioni approssimativamente costanti che fornirà.
Questo metodo ha il vantaggio di semplicità, buona regolamentazione della velocità per ogni regolazione, alta efficienza e moderato costo e manutenzione iniziale.
Il numero di coppie di poli sullo statore può anche essere modificato utilizzando la tecnica di modulazione dell’ampiezza dei poli, una tecnica di modulazione dei titolari della portica rimossa.
Questo metodo di cambio di post ha il vantaggio che il rapporto tra le due velocità disponibili non dovrebbe necessariamente essere 2: 1 come nel metodo del polo sostanziale.
4. Controllo dell’impedenza dello statore
Una tensione ridotta sui terminali della macchina può essere ottenuta inserendo resistenza bilanciata o induttanze in serie con ciascun filo dello statore. In tali condizioni, la tensione del terminale del motore diventa dipendente dalla corrente del motore e la tensione cambia con l’accelerazione del motore. Le caratteristiche della coppia a velocità tipica sono illustrate nella Figura 1.86.
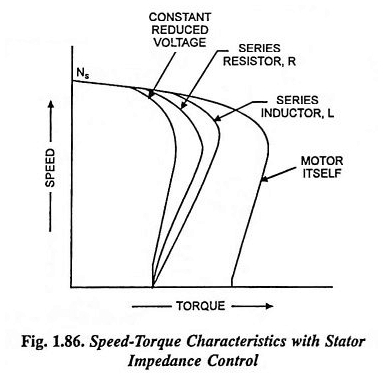
Se l’impedenza (R o X) viene regolata in modo da fornire la stessa coppia di partenza, la caratteristica della velocità del pulcino in caso di aggiunta di induttanza avrebbe una coppia maggiore rispetto alla resistenza aggiuntiva.
Inoltre, queste due caratteristiche ci consentono di avere coppie più grandi di quelle ottenute con la caratteristica con una tensione applicata ridotta, per la stessa coppia di partenza.
L’inserimento della resistenza nel circuito dello statore migliora il fattore di potenza, ma al prezzo di maggiori perdite di energia.
5. Controllo della velocità per variazione della resistenza al rotore (o controllo della resistenza al rotore)
I motori a radice delle ferite sono generalmente lanciati dalla connessione delle resistenze di partenza nel circuito secondario, che sono cortocircuiti nelle fasi mentre il motore accelera.
Se i valori ohmici di questi resistori sono scelti correttamente e se questi resistori sono progettati per un funzionamento continuo, possono essere utilizzati per il doppio obiettivo, per iniziare e controllare la velocità. Inoltre, questo metodo può essere applicato ai motori del rotore arrotolato da solo.
La morbidezza del controllo della velocità dipende dal numero di fasi dei resistori disponibili. Il controllo è fornito nella direzione lungo la velocità di base. L’intervallo di controllo della velocità non è costante e dipende dal valore del carico.
Questo metodo di controllo della velocità ha caratteristiche simili a quelle della velocità del motore DC shunt per mezzo della resistenza in serie con il telaio. I suoi precedenti svantaggi sono una minore efficienza e una scarsa regolamentazione della velocità a causa dell’aumento della resistenza al rotore alle impostazioni a bassa velocità.
Ad esempio, al 50% della velocità sincrona, l’efficacia del rotore è solo del 50% e l’efficienza del motore sarebbe un po ‘inferiore. La variazione di velocità è limitata solo a un intervallo dal 50 al 100%.
I reostati liquidi sono preferiti ai reostati metallici perché non hanno induttanza e i resistori possono essere tagliati delicatamente dando una coppia uniforme.
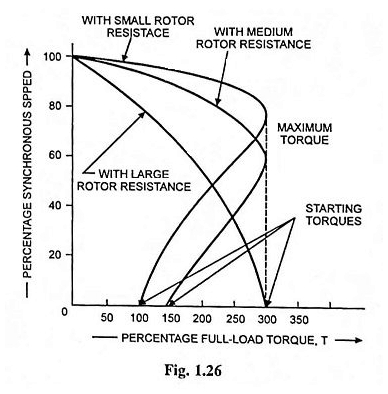
L’introduzione di resistenze esterne nel circuito del rotore di un motore a induzione con anello scorrevole modificherà le caratteristiche del trama della velocità come illustrate nella Figura 1.26.
Questo metodo di controllo del motore a induzione a tre fasi in quanto tale non è quindi adatto per controllare la velocità a una coppia costante.
Ma questo metodo è ampiamente utilizzato per i carichi in cui la coppia richiesta diminuisce considerevolmente man mano che la velocità è ridotta, come i carichi della ventola per i quali l’ingresso di alimentazione diminuisce in modo significativo quando la velocità viene ridotta, il che a sua volta riduce le perdite di rame del rotore.
Inoltre, questo metodo non è adottato per il controllo della velocità continua ma è preferito per il funzionamento intermittente (breve tempo). Un tale metodo di controllo della velocità è ampiamente utilizzato in pratica, per i motori a bassa potenza e nelle gru ad aria.
A volte viene utilizzato tuttavia, per la regolamentazione della velocità dei rulli, in particolare dove vengono forniti con volant per ridurre i picchi di ricarica nel circuito.
Qui, il reostato, chiamato controllo della velocità di crociera, è automaticamente acceso quando il carico aumenta, e quindi la velocità diminuisce e parte del carico viene offset a scapito dell’energia cinetica del volante.
Al contrario, quando il carico diminuisce, la resistenza al circuito del rotore viene ridotta; La velocità aumenta e il volante inizia a conservare l’energia cinetica.
6. Controllo della tensione estera secondaria
In questo metodo, la velocità di un motore a induzione è controllata iniettando una tensione di frequenza scorrevole nel circuito secondario.
Se la tensione iniettata è in linea con l’EMF induce nel circuito secondario, è equivalente a una diminuzione della resistenza nel circuito secondario, quindi lo spostamento diminuisce o la velocità aumenta.
È possibile raggiungere velocità super sincroni iniettando una tensione di frequenza scorrevole in fase con il CMF indotto nel circuito del rotore.
Se la tensione iniettata è nella fase di opposizione all’EMF induce nel circuito secondario, è equivalente ad aumentare la resistenza nel circuito secondario, con conseguente aumento dello scorrimento o una riduzione della velocità.
Pertanto, una vasta gamma di controllo della velocità è possibile con questo metodo includendo apparecchiature di conversione di frequenza nel circuito del rotore.
In questo metodo, gli svantaggi della bassa efficienza e della scarsa regolamentazione della velocità sono superati, ma richiede una e generalmente più macchine ausiliarie per iniettare un EMF a frequenza scorrevole nel circuito secondario, pertanto è più costoso e utilizzato con motori a note molto grandi, come per i motori nelle acciaierie.
Sono stati sviluppati diversi metodi per controllare la velocità dei motori a induzione iniettando una tensione di frequenza scorrevole nel circuito secondario.
I diversi metodi variano nei loro requisiti per le apparecchiature ausiliarie; Dall’incorporazione dell’attrezzatura ausiliaria nella progettazione del motore a induzione stesso a un sistema abbastanza complicato di macchine rotanti ausiliarie e trasformatori di rapporto regolabili.
Il criterio di base secondo cui tale sistema deve riempire è: (i) che la tensione estera variabile ha una frequenza scorrevole, vale a dire una frequenza uguale a SF e (ii) che l’energia associata alla tensione estera è recuperabile.
I sistemi più comuni basati su questo principio sono il sistema Kramer, il sistema LeBlanc e il sistema Scherbius di controllo della velocità dei motori a induzione polifase.
7. Controllo della velocità mediante concatenazione
In questo metodo sono necessari due motori, di cui almeno uno deve avere un rotore della ferita. I due motori possono essere accoppiati meccanicamente per causare un carico comune.
Se l’avvolgimento dello statore di uno di essi, un motore del rotore della ferita, è collegato all’alimentazione AC a tre fasi e il suo avvolgimento del rotore è collegato all’avvolgimento del secondo statore del motore, la velocità della combinazione sarà determinata dalla somma o dalla differenza nel numero di poli nelle due macchine.
In pratica, è normale collegare l’uscita del rotore della prima macchina allo statore dalla seconda macchina in modo tale che i campi di rotazione dei due siano nella stessa direzione; In questa condizione, la velocità risultante sarà determinata dalla seguente espressione.

O
- F è la frequenza alimentare,
- P1 e P2 sono rispettivamente il numero di poli sulle macchine I e II.
Per ottenere una velocità, al di sopra del normale, la coppia del secondo motore viene invertita semplicemente modificando due dei fili del secondo motore. Questa è chiamata cascata differenziale e in questa condizione sarà data dall’espressione.

Un ulteriore controllo della velocità, se lo si desidera, può essere ottenuto anche avendo una seconda macchina del tipo di macchina e inserendo la resistenza di controllo nel circuito del rotore della seconda macchina.

Se i due motori hanno lo stesso numero di poli e sono collegati in cascata cumulativa [Eq. (1.77)], gestiranno la metà quasi la metà. Poiché la coppia dell’albero è in gran parte ridotta in cascata differenziale, non viene utilizzata in pratica.
L’uscita meccanica delle due macchine è approssimativamente nel rapporto di

o P1: P2, vale a dire nel rapporto tra il numero di poli sulle macchine.