Controllo della velocità nel circuito chiuso dell’addestramento del motore a induzione:
Un controllo della velocità ad anello chiuso dell’addestramento del motore a induzione è illustrato nella Figura 6.43. Utilizza un ciclo di velocità interno con un limitatore scorrevole e un ciclo di velocità esterno. Poiché per una determinata corrente, la velocità di scorrimento ha un valore fisso, il ciclo di velocità di scorrimento funziona anche come ciclo di corrente interna.
Inoltre, garantisce inoltre che il funzionamento del motore si verifichi sempre da parte della curva di velocità di velocità tra velocità sincrona e velocità di coppia massima per tutte le frequenze, garantendo così un rapporto di coppia / corrente elevato.
Il lettore utilizza un inverter PWM nutrito da una fonte CC, che presenta capacità di frenata rigenerativa e operativa con quattro quadranti. Lo schema di guida è tuttavia applicabile a qualsiasi giocatore VSI o Cycloconverter con capacità di frenatura rigenerativa o dinamica. Il funzionamento del lettore è spiegato di seguito.
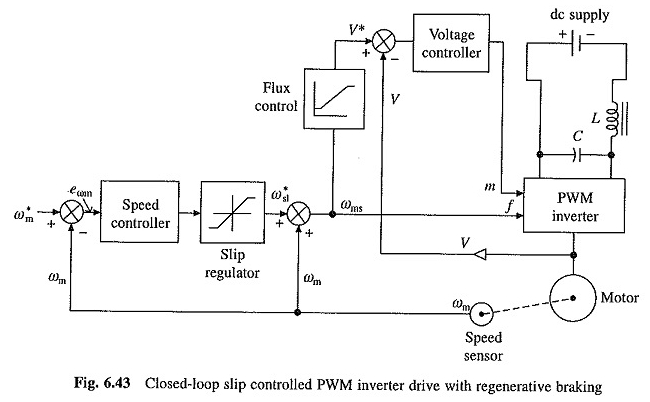
L’errore di velocità viene elaborato tramite un controller PI e un regolatore scorrevole. Il controller PI viene utilizzato per ottenere una buona precisione nello stato di equilibrio e alleviare il rumore.
Il regolatore di scorrimento definisce il controllo della velocità di scorrimento ω * SL, il cui valore massimo è limitato per limitare la corrente dell’inverter a un valore autorizzato. La velocità sincrona, ottenuta aggiungendo la velocità effettiva ωm e la velocità di scorrimento ω * SL, determina la frequenza dell’inverter.
Il segnale di riferimento per il controllo della velocità ad anello chiuso del motore di induzione della tensione del terminale della macchina V * viene generato dalla frequenza F utilizzando un generatore di funzioni.
Garantisce quasi un’operazione di flusso costante alla velocità di base e all’operazione a una tensione terminale costante sopra la velocità di base.
Un aumento delle fasi del controllo della velocità ω * m produce un errore di velocità positivo. Il controllo della velocità scorrevole ω * SL è definito al valore massimo.
Il lettore accelera la corrente massima dell’inverter autorizzato, producendo la coppia massima disponibile, fino a quando l’errore di velocità non viene ridotto a un valore piccolo. Il lettore si deforma infine a una velocità di scorrimento per la quale la coppia del motore bilancia la coppia di ricarica.
Una diminuzione del controllo della velocità produce un errore di velocità negativo. Il comando Slip Speed è definito al valore negativo massimo.
Il lettore è rotto in frenata rigenerativa, corrente autorizzata massima e la coppia di frenatura massima disponibile, fino a quando l’errore di velocità non viene ridotto a un valore ridotto.
Ora, l’operazione si sposta in automobilizzazione e il lettore viene regolato alla velocità di scorrimento per la quale la coppia del motore è uguale alla coppia di carico.
Il lettore ha una risposta rapida perché l’errore di velocità viene corretto per la coppia massima disponibile. Il controllo di scorrimento diretto garantisce un funzionamento stabile in tutte le condizioni operative.
Per funzionare oltre la velocità di base, il limite di velocità di scorrimento del regolatore scorrevole deve essere aumentato linearmente con la frequenza fino al raggiungimento del valore di distribuzione.
Ciò viene eseguito aggiungendo all’uscita del regolatore scorrevole un ulteriore segnale di velocità di scorrimento, proporzionale alla frequenza e di un segno appropriato.
Per le frequenze al di sopra della frequenza per la quale viene raggiunta la coppia di guasto, il limite di velocità di scorrimento viene mantenuto fisso vicino al valore di rottura.
Quando è necessaria una risposta rapida, il massimo scorrimento può essere pari al peccato, poiché i motori di induzione possono essere autorizzati a trasportare la corrente nominale più volte durante le operazioni di transizione a breve termine.
L’inverter e il suo convertitore anteriore sono costruiti utilizzando dispositivi a semiconduttore le cui dimensioni della dieta transitoria e permanente sono le stesse. Quindi, le note dell’inverter e del convertitore anteriore devono essere scelte più volte la corrente del motore.
Ciò aumenterà considerevolmente il costo della variazione. Quando non è richiesta una rapida risposta di transizione, le correnti di convertitore inverter e anteriore possono essere scelte per essere leggermente più alte di quelle del motore.