Controllo orientato al motore a induzione: motore a induzione:
Nei dischi controllati scorrevoli che utilizzano VSI o CSI discussi nelle sezioni precedenti, la tensione dello statore o la corrente dello statore sono controllate usando la frequenza di slittamento. Sono controllati solo in ampiezza.
Il controllo della corrente dello statore non supporta la sua posizione di fase rispetto al flusso. Il controllo non fornisce un comportamento dinamico soddisfacente. C’è una risposta oscillatoria ai cambiamenti nella frequenza del rotore.
La risposta dinamica può essere migliorata usando il principio di controllo orientato a terra del motore di induzione in cui la corrente dello statore è controllata sia in ampiezza che in posizione di fase rispetto al flusso.
Nel controllo della terra del motore a induzione, la corrente dello statore ha la funzione di fornire flusso e coppia.
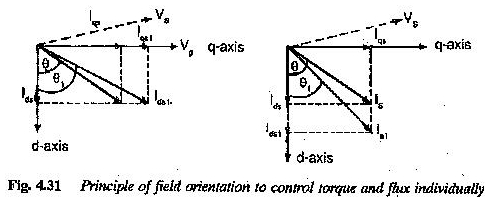
Il motore a induzione avrà un’operazione simile a quella di un motore di se i componenti di corrente dello statore, vale a dire la produzione di flusso e la produzione di coppia sono controllati separatamente (Fig. 4.31).
Questo è in realtà il caso in un motore a corrente continua in cui la coppia dipende dalla corrente di rinforzo e dal flusso sulla corrente di campo. C’è un disaccoppiamento inerente tra di loro ma per gli effetti della reazione della cornice.
Questi effetti possono essere eliminati compensando gli avvolgimenti e c’è un perfetto disaccoppiamento in un motore CC eccitato separatamente. Questo tipo di disaccoppiamento è tentato nel controllo dei motori a induzione. Il principio è chiamato orientamento a terra o controllo del vettore.
Questo controllo migliora le prestazioni dinamiche del lettore a tutte le velocità. La corrente dello statore è suddivisa in due componenti uno lungo l’asse D e l’altro lungo l’asse Q.
Gli assi di riferimento sono stati scelti in modo tale che il flusso del rotore sia completamente disponibile lungo l’asse diretto. Il suo componente di quadratura è zero.
Pertanto, il componente della corrente lungo l’asse D è il produttore componente del flusso e quello lungo l’asse Q è il componente del produttore della coppia. Variando questi componenti in modo indipendente, possiamo avere un controllo indipendente del flusso e del controllo di una coppia. Questi sono rappresentati in FIG.
4.31 (a) e (b). Nel primo, la variazione del flusso è indicata da un componente a asse diretto variabile della corrente mentre nel secondo è rappresentata la variazione del componente dell’asse Q dello statore.
Di conseguenza, il controllo della corrente dello statore è equivalente non solo alla variazione della sua grandezza ma anche al suo angolo di fase. Il metodo è quindi chiamato controllo vettoriale.
Le tecniche di controllo dei vettori utilizzate per mantenere il flusso di spazio aereo costante forniscono scarse caratteristiche dinamiche all’allenamento, poiché la coppia segue la frequenza di scorrimento con un ritardo. Sono state sviluppate tecniche per mantenere costante il flusso di rotore.
In questi metodi, la coppia segue senza indugio, migliorando così il comportamento dinamico. Una dinamica anche di alta qualità è necessaria per il controllo orientato a terra del motore di induzione utilizzato come attuatore.
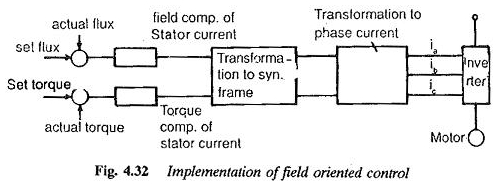
La Figura 4.32 illustra l’implementazione del principio di orientamento sul terreno. Il valore reale del flusso del rotore viene confrontato con il valore di riferimento e l’errore così ottenuto viene utilizzato per controllare il componente dell’asse diretto della corrente.
Normalmente, questo componente è mantenuto costante in modo che il flusso del rotore sia costante. Il componente dell’asse di quadratura è controllato usando il segnale di errore ottenuto dal confronto della coppia reale e della coppia di riferimento. I componenti sono nel framework rotante in modo sincrono.
Di conseguenza, il disaccoppiamento tra i componenti della produzione di flussi e la produzione di coppia del rinforzo richiede un sistema di coordinate di riferimento e la trasformazione delle quantità in questo quadro di riferimento e infine all’interno del quadro dello statore,
In questo controllo, che fornisce un comportamento dinamico molto buono senza una corsa di coppia di transizione, è necessario un flusso secondario, che può essere reso disponibile in due modi:
1. Direttamente utilizzando bobine di rilevamento del flusso.
2. Stima indiretta del flusso utilizzando un modello di macchina, utilizzando quantità terminali facilmente misurabili, come tensioni e correnti.
Il primo metodo che utilizza la misurazione diretta fornisce buoni risultati ed è probabilmente il metodo di controllo più preciso disponibile. La misurazione viene eseguita mediante bobine di ricerca, sonde di Hall o qualsiasi altra tecnica per misurare il flusso.
Il flusso misurato viene utilizzato per effettuare il disaccoppiamento pulito tra i componenti della produzione di coppia e la produzione del flusso di corrente dello statore. Il metodo è essenzialmente insensibile alle variazioni dei parametri. Tuttavia, il motore della gabbia perde la sua robustezza e la sua semplicità di costruzione.
Se proviamo a mantenere la robustezza e la semplicità del motore, il flusso si ottiene utilizzando il secondo metodo. Il flusso del rotore è stimato dal vettore di tensione dello statore, dal vettore di corrente e dalla velocità del rotore. Questo flusso stimato viene alimentato con il controller di coppia.
Questo approccio è sensibile agli errori nei parametri. La resistenza al rotore, le perdite e altri parametri devono essere determinati con precisione per ottenere una prestazione equivalente alla misurazione diretta.
Sfortunatamente, i parametri del motore utilizzati nel calcolo sono determinati dai test del vuoto e non rappresentano i valori dei parametri effettivamente presenti nel punto operativo.
Inoltre, questi parametri variano considerevolmente con saturazione, temperatura, frequenza e ampiezza della corrente. Il livello di flusso secondario può essere modificato dalla variazione nei parametri. Queste variazioni nei parametri causano un controllo del flusso errato, che deteriora le prestazioni dinamiche.
Per evitare errori dovuti alla variazione dei valori dei parametri (principalmente resistenza al rotore), a causa di una stima errata, sia a causa delle condizioni operative del motore, è stata utilizzata l’identificazione o l’adattamento dei parametri automatici.
I metodi identificano le modifiche alle prestazioni dovute alla variazione dei parametri e correggono i parametri di conseguenza.
L’errore tra il valore stimato del flusso e il flusso desiderato nel motore viene utilizzato per correggere il parametro più influente, che è la resistenza del rotore o la costante di tempo del rotore, in modo che il modello della macchina fornisca il valore richiesto del flusso senza alcun errore.
Un altro metodo discusso di recente è una tecnica online per stabilire il valore esatto della resistenza del rotore del motore a induzione. L’identificazione si ottiene iniettando una corrente di sequenza negativa e rilevando la tensione della sequenza negativa.
Il valore della resistenza del rotore viene calcolato utilizzando le informazioni. Il controllo orientato a terra del motore a induzione corregge il valore della resistenza al rotore senza la necessità di un sensore termico.
I metodi del feedback degli osservatori di stato vengono utilizzati anche per l’identificazione dei parametri.
Con l’avvento dei microprocessori (μP) e dei microcomputer, ora è possibile risolvere efficacemente i problemi legati ai dischi con il sistema di allenamento. Il vettore di flusso può essere determinato molto facilmente.
Per eseguire la corrispondenza del modello del motore e l’identificazione dei parametri del rotore mediante una procedura di correlazione, μPS può essere molto efficace senza alcuna misura aggiuntiva.
Gli μPs facilitano anche l’implementazione di algoritmi sofisticati per generare sequenze di tiro inverter.
Inoltre, il processo sviluppato nel controllo orientato al campo del sistema di formazione generale è diventato economicamente fattibile, poiché finora l’hardware costoso utilizzato può essere sostituito dal software.
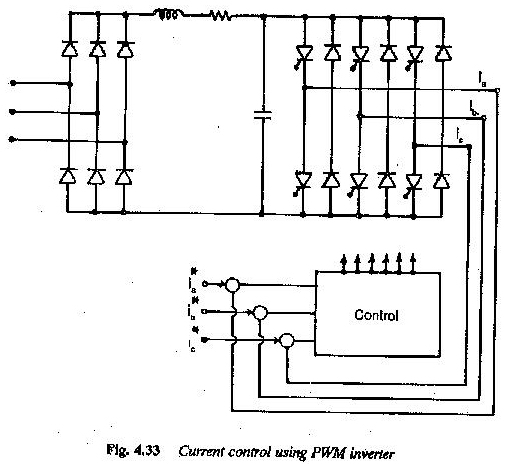
L’orientamento del campo può essere implementato molto facilmente con CSI che alimenta un controllo orientato al motore del motore a induzione. Poiché l’inverter PWM ha un buon comportamento dinamico, questi vengono utilizzati con un controllo corrente sul lato dell’uscita.
La Figura 4.33 illustra il principio del controllo corrente usando l’inverter PWM. Questo ha i vantaggi di VSI e CSI.
Manotte a induzione nella modalità di flusso del flusso:
In caso di velocità di motori a corrente continua al di sopra della velocità di base si ottengono riducendo la corrente di campo a una tensione di integrazione costante. La coppia ha sviluppato diminuisce. Una modalità di potenza costante può essere eseguita in questo intervallo di velocità ed è chiamata flusso del flusso.
Un comportamento simile può essere osservato nel caso dei motori a induzione. La tensione raggiunge il suo valore nominale per la frequenza nominale. Per le frequenze al di sopra di questo valore, la tensione del tenditore viene mantenuta costante. La velocità del motore aumenta in proporzione alla frequenza.
A causa dell’aumento della frequenza, il flusso dello spazio aereo diminuisce. La coppia a una data frequenza del rotore è inversamente proporzionale al quadrato della frequenza dello statore e la potenza sviluppata non è costante. Il comportamento dinamico in condizioni di flusso indebolito è molto scarso. Questo può essere migliorato da una frequenza di scorrimento variabile per la massima coppia proporzionale alla frequenza.
Un motore con un alimentatore corrente ha un buon comportamento dinamico quando c’è una tensione di riserva attraverso l’inverter.
Una volta raggiunto un certo valore di frequenza più elevato, l’EMF posteriore del motore è uguale alla tensione applicata e non vi è alcuna tensione di riserva per il controllo di corrente.
Il valore effettivo dello statore e del flusso del rotore va lontano dai valori desiderati e il lettore ha un comportamento negativo dinamico. Migliorare le prestazioni dinamiche del motore nella modalità di indebolimento del terreno è un problema di interesse.
Questo può essere fatto controllando l’ampiezza del flusso del rotore e quindi l’EMF posteriore, in modo che una riserva di tensione sufficiente sia disponibile nell’intervallo di velocità al di sopra della velocità di base. Anche qui è possibile utilizzare metodi diretti e indiretti di controllo del flusso.