Controllo orientato alla parte del motore a induzione a tre fasi:
La corrente dello statore di un motore a induzione ha le funzioni di produzione del flusso di spazio aereo richiesto (magnetizzazione) e sviluppare la coppia richiesta per causare il carico.
Un controllo controllato del motore a induzione a tre fasi avrà il suo funzionamento simile a quello di un motore a corrente continua se i componenti di corrente dello statore (vale a dire, la produzione di flusso e la produzione di coppia) possono essere controllati separatamente.
Questo tipo di controllo è possibile in un motore CC eccitato separatamente in cui la coppia e il flusso possono essere controllati separatamente e indipendentemente variando rispettivamente il rinforzo e la corrente di campo.
Esisterebbe un disaccoppiamento intrinseco tra di loro, ma per gli effetti della reazione del rinforzo. Questi effetti possono essere eliminati dalla compensazione per il rinforzo. Un disaccoppiamento perfetto può essere ottenuto in un motore CC eccitato a pagamento separatamente.
Questo controllo versatile fornisce un comportamento dinamico molto buono a un motore a corrente continua. Pertanto, un’unità ad alte prestazioni che utilizza un controllo del motore a induzione a tre fasi viene ottenuta cercando di disaccoppiare i componenti di corrente dello statore.
Questo principio è chiamato controllo dell’orientamento del campo o del controllo del vettore. Questo controllo migliora il comportamento dinamico e si può ottenere un’ottima formazione delle prestazioni anche a bassa velocità.
I due componenti della corrente sono identificati e sono orientati correttamente negli ordini ortogonali rispetto al vettore di flusso.
I componenti di corrente possono essere orientati in relazione a uno dei tre flussi, vale a dire il flusso dello statore, il flusso di spazio aereo o il flusso del rotore.
L’analisi mostra che le prestazioni dinamiche del lettore non sono al livello desiderato se l’orientamento viene eseguito rispetto allo statore o al flusso di spazio aereo. Questo cattivo comportamento dinamico deriva dal ritardo della coppia seguendo lo spostamento.
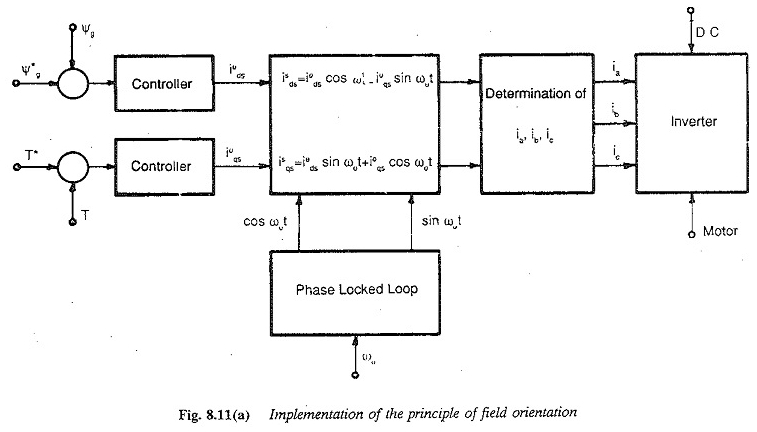
È possibile un disaccoppiamento naturale ed efficace se l’orientamento viene eseguito rispetto al flusso del rotore, ciò porta a un controllo di coppia ad alte prestazioni della guida con una risposta molto rapida. L’implementazione del principio di orientamento sul terreno è illustrata nella Figura 8.11.
 Quando è stato suggerito il principio di orientamento sul campo, non ha ricevuto l’attenzione dell’industria e non era molto popolare a causa di attrezzature complicate. Con gli sviluppi nei componenti digitali e nei microprocessori attraverso LSI e la miniaturizzazione dei componenti, questo controllo ad alte prestazioni del controllo del motore a induzione a tre fasi diventa popolare. Un campo principale di applicazione e un uso efficace di microprocessori ad alta velocità è il controllo vettoriale del controllo controllato nel motore a induzione a tre fasi. Questo controllo richiede
Quando è stato suggerito il principio di orientamento sul campo, non ha ricevuto l’attenzione dell’industria e non era molto popolare a causa di attrezzature complicate. Con gli sviluppi nei componenti digitali e nei microprocessori attraverso LSI e la miniaturizzazione dei componenti, questo controllo ad alte prestazioni del controllo del motore a induzione a tre fasi diventa popolare. Un campo principale di applicazione e un uso efficace di microprocessori ad alta velocità è il controllo vettoriale del controllo controllato nel motore a induzione a tre fasi. Questo controllo richiede
- Informazioni esatte sul flusso del rotore.
- La regolazione precisa dei componenti di corrente dello statore in funzione del riferimento.
Le funzioni di un microprocessore nel controllo vettoriale del motore di induzione sono le seguenti:
- Trattamento dei segnali ottenuti dal coder dell’albero per determinare la velocità del rotore e anche l’angolo del rotore. Questo angolo del rotore dovrebbe essere usato nelle trasformazioni da un frame all’altro.
- La stima del flusso utilizzando tensioni, correnti e velocità del terminale, a seconda di uno dei modelli della macchina.
- Calcoli per quanto riguarda le trasformazioni di fase e coordina per identificare i due componenti della corrente. Dopo il controllo necessario, questi componenti devono essere trasformati per fornire i valori di riferimento per il confronto con le correnti di fase reali.
- Speed e attuali loop nel controllo del feedback. L’implementazione di controller in questi loop.
- Per produrre segnali a griglia per il convertitore lato macchina e il lato della linea, il convertitore lato macchina decide la frequenza mentre il lato della linea decide la corrente / tensione. I segnali di tiro al convertitore di linea laterale sono ottenuti allo stesso modo descritto per un doppio convertitore. I segnali di tiro sul convertitore lato macchina decidono la frequenza. La velocità di controllo orientata sul campo del motore a induzione a tre fasi viene aggiunta all’uscita del controller scorrevole per decidere la frequenza dell’uscita dell’inverter. L’aggiunta deve essere precisa perché una grande quantità viene aggiunta a una piccola. L’aggiunta digitale a un microprocessore è precisa. Il microprocessore deve quindi essere in grado di fornire o generare segnali di tiro al convertitore lato macchina.
- Acquisizione di dati Il microprocessore deve acquisire segnali di feedback in forma digitale. È richiesto un trasferimento di dati al processore. È richiesto un flusso di dati dal processore e dal processore.
- Limitare le variabili di controllo delle funzioni lineari utilizzate nel comportamento di controllo e nel comportamento non lineare del convertitore durante la conduzione discontinua. Compensazione per guadagno variabile durante le modalità discontinue di conduzione e indebolimento del campo.
Le operazioni matematiche includono moltiplicazione, divisione, aggiunta e sottrazione. L’unità di elaborazione aritmetica del microprocessore deve essere in grado di eseguire queste operazioni.
La stima del flusso può essere effettuata mediante integrazione digitale utilizzando la regola di Simpson ben nota o la regola trapezoidale. Ma i risultati soffrono di una perdita di precisione a causa di errori di troncamento nei processori a otto bit. Questi errori portano all’instabilità delle operazioni.
Usa I del comando galleggiante con doppia precisione migliora le prestazioni del processore. Tuttavia, ciò richiede un lungo periodo di calcolo. Per ridurre il carico del microprocessore, la stima del flusso può essere portata via mediante modelli analogici esterni al processore.
Il flusso calcolato può essere trattato nel processore. I valori di riferimento delle correnti e dei flussi sono sviluppati dal processore.
A seconda della velocità del processore e della sua capacità di svolgere le funzioni di cui sopra, si può stabilire un bordo tra l’attrezzatura locale e il microprocessore, per svolgere le funzioni.
A volte, il controllo multi -processore può essere eseguito in base alla velocità e alla qualità del controllo richiesto.
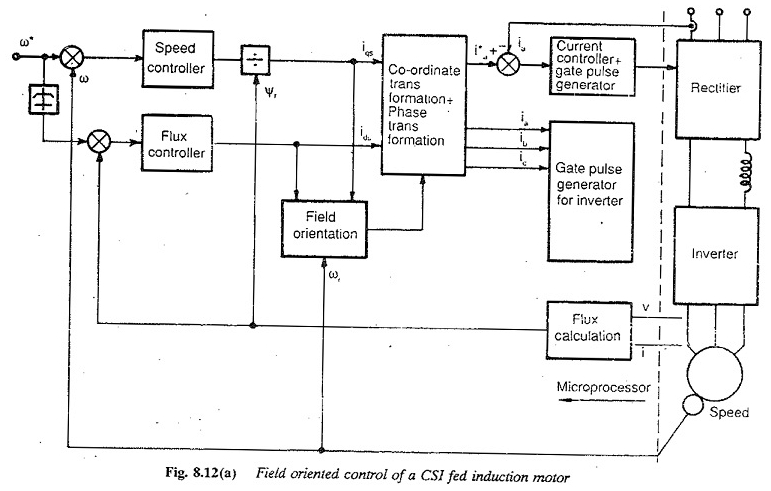
L’orientamento sul terreno è possibile con l’inverter della sorgente di tensione e il controllo della sorgente corrente della sorgente corrente fornita dal campo del motore a induzione a tre fasi. L’attuale inverter della sorgente è ampiamente utilizzato a causa della semplicità del suo circuito di potenza.
Le caratteristiche del controllo orientato al controllo mediante CSI sono discusse qui (8.12 (a)). A volte un inverter PWM può essere controllato correttamente per fornire correnti di riferimento (Fig. 8.12 (b)). Questo controllo può essere eseguito usando un microprocessore.

Il flusso può essere misurato direttamente usando bobine di ricerca o sonde Hall. I segnali analogici vengono convertiti in digitale per nutrirsi nel microprocessore per il trattamento successivo.
Questa misura diretta, anche se teoricamente esatta, ha le seguenti limitazioni o difficoltà: la presenza di sonde sensibili o bobine di ricerca rende il motore di induzione più sensibile ma la sua robustezza intrinseca si perde.
Il segnale misurato è sovrapposto dalle armoniche di fessura che richiedono il filtro. Aiutare a misurare e gli errori di conversione rendono i risultati non molto affidabili. Pertanto, normalmente, viene utilizzato il calcolo FLWC utilizzando i modelli della macchina (stima indiretta).
Questi modelli di macchine per calcolare il flusso usano il controllo orientato a terra dei parametri del motore a induzione a tre fasi determinati dai test del rotore senza carico e bloccati. Inesattezza; Tra i modelli nella stima dei parametri, la variazione della macchina!
I parametri dovuti a temperatura e saturazione devono essere esattamente presi in considerazione nella stima. La precisione viene modificata in caso di integrazione coinvolta nella stima. Ciò accade se la tensione e la velocità vengono utilizzate nel calcolo.
A bassa velocità, l’integrazione introduce considerevoli errori in questi errori e le prestazioni affidabili possono essere effettuate su una vasta gamma di fermate alla fermata.
Per migliorare le prestazioni, le impostazioni della macchina utilizzate nel modello devono essere il più precise possibile. Altrimenti, possono essere corretti usando un processo di correzione, in modo che sia possibile l’accoppiamento esatto. Il processo di correzione migliora il parametro.
Stima del flusso indiretto e dell’identificazione o dell’adattamento noto come parametri vengono utilizzati per ottenere un motore a induzione con un accoppiamento perfetto.
Il flusso stimato dalle variabili rilevate effettive della corrente e della velocità con i parametri, viene confrontato con il valore di riferimento (determinato dalle quantità di riferimento). La differenza viene utilizzata per correggere i parametri della macchina che entrano nei calcoli.
Il parametro più influente è la resistenza del rotore o la costante del tempo del rotore e viene corretto fino a quando il modello richiesto del flusso.
L’unica soluzione per il controllo orientato al campo con l’adattamento dei parametri è l’uso di microprocessori o microcomputer. Diverse tecniche sono disponibili in letteratura per adattare i parametri. Tale diagramma è illustrato nella Figura 8.13.
Il microprocessore deve eseguire operazioni matematiche per stimare il flusso di valori di riferimento e variabili misurate.

La selezione di un microprocessore per l’applicazione sopra può essere basata sulle seguenti considerazioni:
- Risoluzione del premio per il raddrizzatore controllato in fase. La risoluzione decide sull’asimmetria nelle riprese.
- Operazioni matematiche che possono essere eseguite. Dovrebbe essere in grado di aritmetica binaria e decimale, compresa la moltiplicazione e la divisione
- La capacità di memoria richiesta
- Generazione di orologio interno
- Gestione del software per l’implementazione di controller, limitatori, ecc.
- Capacità di interruzione
Alcune altre applicazioni di un microprocessore nel controllo dei motori a induzione sono:
- Un microprocessore può essere utilizzato per la velocità di cohtrol usando un controller di tensione
- Può essere utilizzato per controllare la velocità utilizzando lo schema di recupero di energia scorrevole. Il controllo dei Verctors può anche essere usato qui.
- Può essere utilizzato per un lettore controllato controllato con il controllo del flusso e della coppia nell’addestramento CSI Fed.
- Può essere utilizzato per implementare le tecniche PWM per controllare la tensione e le armoniche sia nei motori di induzione VSI che in CSI.
- Può essere utilizzato per controllare il cicloconverteur.