Controllo vettoriale del motore a induzione:
L’unica idea dietro il controllo vettoriale del motore a induzione è quella di avere un lettore elettrico che deve offrire prestazioni più elevate che il motore CC si è eccitato separatamente ampiamente utilizzato nel settore.
Inoltre, un tale lettore dovrebbe anche emergere come alternativa robusta e affidabile, senza manutenzione e più economica del giocatore CC. Alcuni anni fa, il motore DC eccitato separatamente era considerato un principale cavallo di battaglia nell’industria.
Ciò è dovuto alle sue prestazioni dinamiche più rapide rispetto al motore a induzione. La risposta dinamica più rapida del motore CC si trova nel suo motore doppiamente nutrito con un’installazione inerente a una coppia e controllo del flusso nel motore.
Prima dell’introduzione del controllo vettoriale del motore a induzione, i metodi che hanno goduto di un’ampia accettabilità nel controllo della guida del motore a induzione della gabbia sono chiamati controllo della tensione, controllo della frequenza, controllo della resistenza al rotore, controllo V / F, controllo di scorrimento, controllo di recupero della potenza scorrevole, ecc.
Tutti questi metodi di controllo sono qualificati come controllo scalare di un motore a induzione e con questi, il motore della gabbia ha prestazioni dinamiche più basse rispetto al motore eccitato separatamente.
Nei loro sforzi per avere un lettore AC gratuito, robusto e ad alte prestazioni, il ricercatore voleva ottenere prestazioni e le caratteristiche migliorate del motore CC separatamente con un motore a induzione con un rotore a gabbia.
In questo senso, Blaschke ha introdotto il concetto di controllo vettoriale del motore a induzione. Blaschke, nel 1972, introdusse il principio di orientamento sul terreno per eseguire le caratteristiche del motore DC in un motore a induzione.
Per la stessa cosa, ha usato il controllo disaccoppiato della coppia e del flusso nel motore e ha dato il suo nome come controllo del travevettore.
Il lettore del motore a induzione della gabbia con controllo o controllo orientato al campo offre un alto livello di prestazioni dinamiche e controllo a circuito chiuso associato a questo lettore offre la stabilità a lungo termine del sistema.
Sebbene non vi sia alcuna differenza importante tra i controlli scalari e vettoriali, quest’ultima ha alcune proprietà che lo rendono favorevole come sistema di controllo con alte prestazioni dinamiche.
Il controllo vettoriale è anche chiamato controllo indipendente o disaccoppiato in cui vengono controllati i vettori di coppia e corrente di flusso.
È un fatto ben consolidato che nella modalità di controllo vettoriale, il lettore del motore della gabbia è linearizzato e che si comporta come un motore a corrente continua completamente compensata, in cui il controllo della corrente di rinforzo influisce direttamente sulla coppia elettromagnetica sviluppata dal lettore.
Allo stesso modo, nel motore della gabbia, il metodo di controllo vettoriale, le due correnti di quadratura responsabili per la produzione di flusso e la coppia, rispettivamente, sono controllate in modo indipendente e la risposta dell’attuale componente del produttore di coppia è molto rapida, fornendo così un controllo della coppia più rapido e quindi il lettore ha un alto livello di prestazioni dinamiche.
In senso lato, il controllo del motore di induzione della gabbia mentre si comporta come un motore di corrente continua completamente compensata è noto come vettore.
In questo caso, le correnti dello statore sono espresse in riferimento a un framework di coordinate che funziona in sincronismo con lo statore o il vettore MMF del rotore.
Le correnti dello statore espresse su queste coordinate sono risolte in due componenti ortogonali che producono il flusso e la coppia nel motore. Questi sono simili al motore a corrente continua in cui la coppia e il flusso sono controllati controllando in modo indipendente i frame del rinforzo e del campo.
Per controllare la coppia e il flusso (quindi la velocità) indipendentemente nel motore di induzione, è necessario controllare l’ampiezza e la fase delle tre correnti dello statore (IAS, IBS, ICS) attraverso un inverter veloce.
A tal fine, viene utilizzato normalmente un CC-TVSI (inverter della sorgente di tensione di corrente). Un tale algoritmo di controllo sarebbe molto coinvolto.
L’uso è fatto di trasformazione di tre o due fasi (un’operazione di matrice ben nota). Le correnti a due fasi, gli ID e il QI che si trovano nella quadratura di fase richiedono il controllo delle due ampiezze e una fase che è ciò che viene effettuato dal controllo del vettore.
Il controllo vettoriale del metodo del motore di induzione è la forma del diagramma a blocchi è illustrata nella Figura 11.63 Alcuni stadi cruciali sono i seguenti.
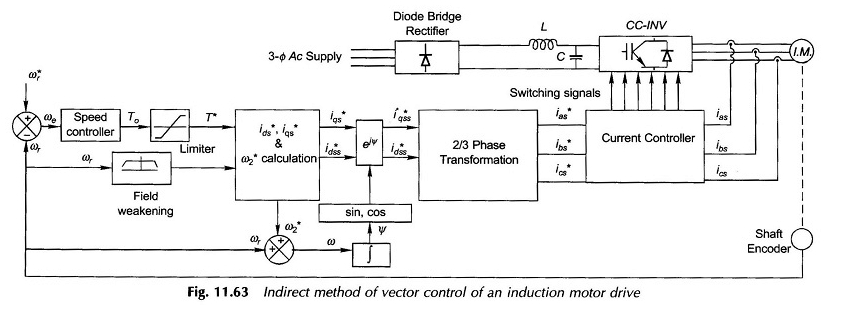
Dal segnale di velocità del motore (ωr) e dalla velocità desiderata (ω * r), viene determinato l’errore ωe. Il controller di velocità calcola la coppia del motore (a) necessaria per correggere la velocità che passa attraverso un limitatore per determinare il segnale di coppia T *.
In un blocco di campo parallelo, un blocco indebolito, la velocità del motore ωr genera un altro segnale.
Questi due segnali sono usati per calcolare i * ds e i * Qs (correnti di quadratura ideale) e una correzione della velocità ω * 2.
Ω = ωr + ω * r è integrato che viene quindi utilizzato per trovare la trasformazione ejψ. Questa trasformazione effettuata su (i * ds, i * qs) fornisce l’ultimo set ideale (i * dss, i * qss).
La trasformazione di fase 2/3 su (i * dss, i * qs) dà la corrente dello statore ideale (i * as, i * bs, i * cs).
Le correnti dello statore misurate (IAS, IBS, ICS) vengono confrontate a (i * as, i * bs, i * cs) dal controller di corrente e i sei segnali generati controllano le correnti alimentate dal motore di induzione.
Quanto sopra è una spiegazione semplificata dell’algoritmo di controllo vettoriale per il controllo del motore di induzione.
Nel controllo del vettore del motore di induzione, il flusso del rotore è regolato controllando la corrente di avvolgimento dello statore. Per regolare il flusso del rotore, è anche desiderata conoscenza della sua posizione. La posizione del flusso del rotore viene rilevata o stimata.
Di conseguenza, secondo le metodologie adottate per valutare la posizione del vettore di flusso del rotore, il controllo vettoriale è chiamato controllo vettoriale diretto o controllo vettoriale indiretto.