Costruzione del motore a induzione a tre fasi:
Un motore a induzione a tre fasi che costruisce un convertitore presenta i seguenti vantaggi su una linea nutrita sulla linea:
1. L’avvio della lavanderia è garantita da una frequenza variabile da un fondo
2. È possibile l’avvio e l’accelerazione della corrente e della coppia.
3.La rete non è più soggetta a una corrente di sovratensione elevata come con l’interruttore diretto sulla costruzione di motori a induzione a tre fasi in gabbia e, come tale, le apparecchiature di partenza speciali possono essere omesse anche ad alte probabilità.
4. Molti momenti di inerzia possono essere accelerati senza bisogno della dimensione del motore.
5. Il convertitore funge da dispositivo di disaccoppiamento.
Di conseguenza, il feedback del motore nel punto di corto circuito non si verifica, quando le linee short della linea, la valutazione del corto circuito, sulla base del quale il maggior numero di servizi deve essere esagerato è quindi basso, permettendo a un’economia.
Come è già stato indicato, la velocità di costruzione del motore a induzione a tre fasi può essere controllata fornendo allo statore una tensione variabile, un alimentatore a frequenza variabile utilizzando convertitori di frequenza statica.
È inoltre possibile il controllo della velocità alimentando la potenza scorrevole nel sistema di alimentazione utilizzando i convertitori nel circuito del rotore. Fondamentalmente, ci sono due diversi metodi di controllo della velocità.
1.
2.Sice Controllo del motore utilizzando una tensione variabile di frequenza variabile, che funziona il motore a una frequenza costante del rotore.
Il controllo della velocità per variazione nella frequenza di slittamento si ottiene come segue:
1. Controllo della tensione dell’astatore utilizzando un controller di tensione a tre fasi.
2. Controllo della resistenza del rotore usando una resistenza controllata da un elicottero nel circuito del rotore.
3. Utilizzo di una cascata di convertitore nel circuito del rotore per recuperare l’energia dello spostamento.
4. Usando un cicloconverteur nel circuito del rotore.
Controllo di un motore di induzione mediante variazione di tensione dello statore (utilizzando un controller di tensione a tre fasi)
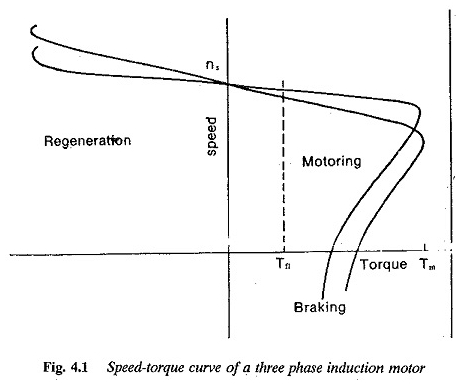
È molto noto che la coppia di una costruzione di motori a induzione a tre fasi varia direttamente in proporzione al quadrato della tensione. La coppia di un motore a induzione è approssimativamente data da

E la curva della velocità di coppia è come mostrato nella Figura 4.1. Lo scorrimento per la coppia massima è dato da 
che è indipendente dalla tensione dello statore. Tuttavia, questo può essere variato in base alla variazione della resistenza al rotore. Il valore massimo di coppia è dato da

Cambia anche come il quadrato della tensione applicata. Se la tensione è ridotta all’80%, la coppia massima scende al 64%. La variazione nella tensione applicata è ottenuta mediante un controller di tensione.
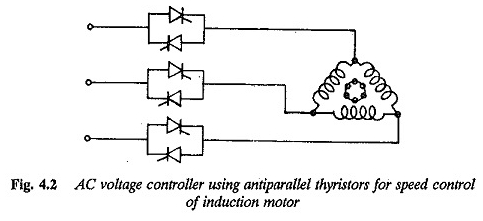
Questo metodo di controllo della velocità di un motore a induzione è semplice ed economico. Il controllo della tensione dello statore è ottenuto mediante il controllo di fase dei tiristori antiparalleli, collegato come indicato nella Figura 4.2.
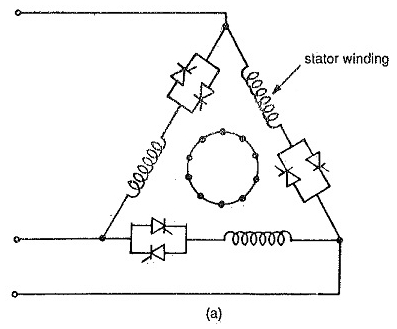
Le figure 4.3 (a) e (b) illustrano due connessioni pratiche di un controller di tensione che fornisce una costruzione del motore con induzione a tre fasi. In connessione con la Figura 4.2, i tiristori devono solo gestire la corrente di fase. Le correnti armoniche diventano più alte. Nella Figura 4.3, la penalità armonica è piuttosto più.
La tensione dello statore può variare da zero a valore completo nell’intervallo di angolo del trigger. Il fattore di linea sul lato della linea è molto mediocre a causa delle armoniche e del potere reattivo a causa del controllo di fase.
Quando un motore a induzione della gabbia è alimentato da un alimentatore di tensione variabile per il controllo della velocità, è possibile effettuare le seguenti osservazioni:
1.La velocità di coppia oltre il punto di coppia massimo ha una forma negativa. Un punto operativo stabile in questa regione non è possibile per un carico di coppia costante.
2. Il controller di tensione dovrebbe essere in grado di resistere ad alto avvio, l’intervallo di controllo della velocità è piuttosto limitato.
3. Il fattore di potenza del motore è scarso.
Per evitare le difficoltà di cui sopra, la costruzione del motore a induzione trifase deve avere un rotore ad alta resistenza. Questo rende il punto di variazione della coppia massima a S = 1, riducendo così la regione instabile della curva di velocità di velocità.
A causa dell’aumento della resistenza al rotore, la corrente iniziale diminuisce, il fattore di potenza migliora e aumenta l’intervallo di controllo della velocità.
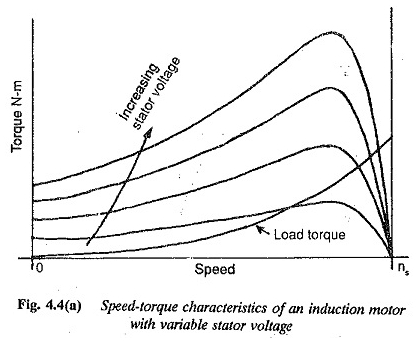
Il metodo di controllo della velocità è quindi vantaggioso con un rotore ad alta resistenza. Le curve di velocità di coppia per questo controllo sono rappresentate nella Figura 4.4 (a). La nota corrente del controller decide la possibile coppia ad ogni velocità.
La curva del limite di coppia a seconda della velocità può essere derivata. La Figura 4.4 (b) mostra questa curva di coppia limite per la notazione di progettazione del controller, che è tre volte la corrente nominale del motore. È rappresentata la corrente in funzione della velocità e della tensione dello statore.
Durante il controllo, se il valore di corrente supera il valore limite, è necessario utilizzare il limite di corrente automatica. Con questo, il valore dell’angolo di tiro viene regolato fino a quando la corrente autorizzata circola.
Anche se il metodo è semplice ed economico, le perdite motorie aumentano con l’aumento dello spostamento. L’aumento delle perdite può essere attribuito all’aumento della corrente del motore a causa della caduta del flusso dello spazio aereo e dell’alta resistenza del rotore.
Il rapporto R1 / R′2 può essere considerato rappresentativo per decidere queste perdite perché l’aumento della resistenza è decisivo nella limitazione dell’attuale disegno. L’efficienza del motore può essere fornita approssimativamente da
![]()
dove s è lo scorrimento del motore.
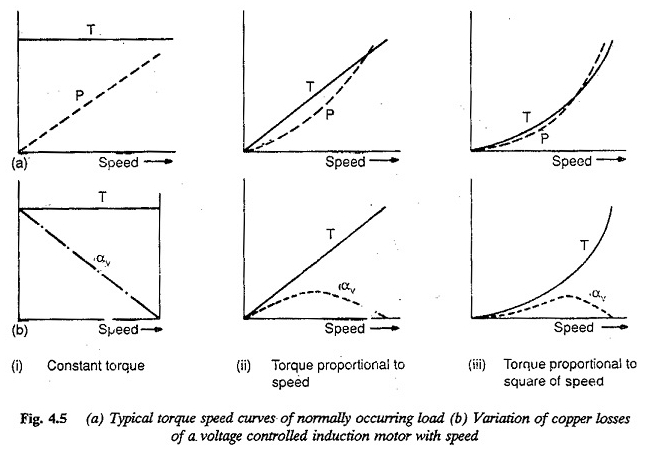
Il tipo di carico guidato dal motore influenza la corrente disegnata e le perdite del motore man mano che lo spostamento varia. Le spese normalmente eseguite sono
1. Carichi di coppia comodi
2.RoRque variabile proporzionale alla velocità
3. Totor variabile proporzionale al quadrato della velocità

Considera che le caratteristiche di velocità di carica del carico sono fornite da un’equazione generale
![]()
Se il valore di x = 0, è equivalente a un carico di coppia costante. X> 0 per carichi di coppia variabili (Fig. 4.5a).
Perdite di rame del rotore
![]()
dove PD1 è la potenza dello spazio aereo o l’ingresso di alimentazione del rotore.

Ma lo scorrimento del motore
e l’ingresso di potenza del rotore
![]()
Il valore di alimentazione massimo trasferito al rotore è
![]()
Perdite di rame se espresso come rapporto pd1max che abbiamo
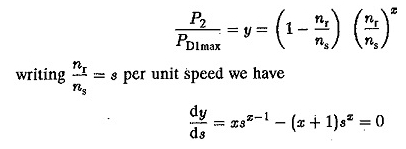
Per il valore di SAT che è massimo. Il valore di

Per un valore massimo della perdita di rame del rotore. I valori massimi delle perdite di rame del rotore sono dati

All’aumentare del valore di X, il valore di YM diminuisce. È possibile determinare anche il valore massimo della corrente del rotore e la velocità dell’unità a cui si verifica. Abbiamo
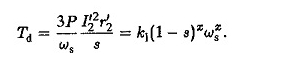
da cui la corrente del rotore
![]()
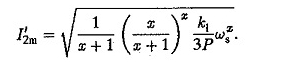
per velocità unitaria per il valore massimo della corrente del rotore è anche
![]()
Il valore massimo della corrente del rotore può essere determinato come
Per casi speciali
La variazione delle perdite è rappresentata nella Figura 4.5 (b) per diversi tipi di carichi. I carichi di coppia costante non sono favoriti a causa dell’aumento delle perdite pessime con lo spostamento e del massimo a S = 1,0.
Ciò è ovvio, dalla variazione del flusso perché la tensione è variata per il controllo della velocità. Per mantenere una coppia costante, il motore attira una corrente pesante, che porta a cattiva coppia / ampere, scarsa efficienza e un cattivo fattore di potenza a bassa velocità.
Quando la coppia varia in proporzione diretta per l’accelerazione, le perdite di rame hanno un valore massimo del 25% di potenza nominale ad una velocità di 0,5 Ω.
Per le coppie proporzionali al quadrato della velocità, la velocità dell’unità a cui le perdite di rame sono massime è di 2/3 e il valore massimo delle perdite di rame è 0,149 di potenza nominale.
Il metodo di controllo della velocità può essere utilizzato vantaggiosamente per carichi di pompaggio o ventola in cui la coppia è proporzionale al quadrato della velocità.
Dalla discussione di cui sopra, questo metodo di controllo della velocità è adatto solo ai seguenti casi:
1. Per operazioni a breve termine in cui è definita la durata del controllo della velocità.
2. Per controllare la velocità dei soffianti o delle pompe con variazioni paraboliche o cubiche nella coppia con la velocità. Ciò non è adatto a carichi di coppia costanti a causa di un aumento delle perdite e del riscaldamento.
3. Per controllare la velocità del motore con scarsa efficienza sotto il normale funzionamento.
Il tipo di carico (coppia a seconda della velocità del carico) sul motore di trasmissione influenza le perdite nel motore. Le onde di ingresso non sinusoidali causano correnti non sinusoidali che aumentano le perdite armoniche.
Di conseguenza, le perdite totali aumentano in particolare a basse velocità e queste perdite causano un possibile restringimento del motore o un motore eccessivamente dimensionale deve essere utilizzato quando viene utilizzato questo metodo.
Per i carichi di tipo soffiante in cui T α N2, il valore massimo della corrente si verifica ad una velocità di 2/3 della velocità di base. Questa corrente dipende dal carico completo del motore del motore. Per grandi motori scorrevoli (rotori ad alta resistenza), la corrente massima a corrente nominale sta diminuendo.
Per carichi di coppia costanti, le perdite di potenza aumentano con la riduzione della velocità e raggiungono il valore massimo alla velocità zero stessa. Per carichi con t α N, il massimo si verifica a 1/2, la velocità e le perdite di base ammontano al 25% della potenza dello statore.
Le perdite che si verificano nel motore sono responsabili dell’aumento della temperatura del motore. Le perdite devono essere mantenute nel valore autorizzato in modo che il motore funzioni ancora con un aumento della temperatura autorizzato. I diversi tipi di addebiti discussi tendono ad aumentare le perdite motorie.
Inoltre, la forma d’onda della tensione di ingresso è distorta. Le correnti dello statore e del rotore sono non sinusoidali con un ricco contenuto armonico. Queste armoniche causano ulteriori perdite. Possono essere considerati il 50% delle perdite nominali di rame.
L’aumento delle perdite del motore con grandi turni porta a un restringimento del motore. Un motore normale può essere rilasciato da 5 a 6 volte. Se viene utilizzato il rotore ad alta resistenza, il fattore arioso diminuisce.
Le perdite totali del motore sono

O
FV si occupa dell’aumento delle perdite dovute alla distorsione ed è normalmente considerato 1,5.
PR è la valutazione del motore
K1PR è il totale della perdita di rame del motore.
Per mantenere l’aumento della temperatura autorizzata, le perdite autorizzate sono

O
η è l’efficienza del motore
αv è la relazione delle perdite a una velocità minima per notare perdite. velocità.
Valutazione PTVP del motore.
Il fattore αv dipende dal tipo di carico utilizzato. Per le macchine raffreddate forzatamente, è 1,0 e indipendente dalla velocità. Se la macchina è auto-refroit, dipende dalla velocità. Questo valore diminuisce quando il limite inferiore della velocità diminuisce.
Una caratteristica tipica per una macchina con due poli è rappresentata nella Figura 4.5 (c). Il restringimento è anche influenzato dall’efficienza del motore. Man mano che l’efficienza riduce 1-η / η aumenta. Per questo tipo di motore di controllo della velocità del rotore grande, viene utilizzata 17 resistenza. Hanno scarsa efficienza. Pertanto, il restringimento del motore diminuisce.

La discussione di cui sopra indica chiaramente che un determinato motore è distorto in modo diverso quando provoca diversi tipi di carichi.
In altre parole, la potenza richiesta dal carico è costante, il motore di trasmissione deve essere dimensioni diverse per diversi tipi di curve di velocità di carico del carico, l’esempio a seconda dell’illustre.