Braking del motore a induzione:
I tre tipi di frenata del motore a induzione, vale a dire la frenata rigenerativa, dinamica e controcanicata può essere realizzata con motori a induzione.
Frenata rigenerativa
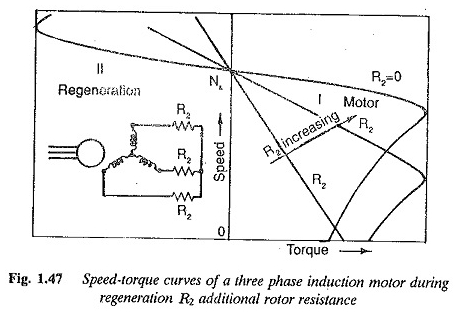
Quando il rotore di un motore a induzione funziona più velocemente del campo dello statore, lo spostamento diventa negativo e la macchina genera potenza. Pertanto, ogni volta che il motore tende a funzionare più velocemente del campo rotante, si verifica la frenata rigenerativa e KE
Le parti rotative vengono restituite al settore. La curva della velocità di coppia si estende al secondo quadrante (Fig. 1.47). La velocità del motore diminuisce. La coppia di frenatura gestisce il motore a velocità costante, fermando la sua tendenza a girare più rapidamente.
A causa degli effetti della resistenza allo statore, la coppia massima sviluppata durante la rigenerazione è superiore alla coppia massima durante il manicotto. Nei paesi e nelle gru, il motore di trasmissione tende a funzionare più velocemente della velocità sincrona.
Questa situazione si verifica quando il paranco solleva una gabbia vuota. A causa del contrappeso, il caso può acquisire velocità pericolose. La transizione avviene quasi automaticamente e una coppia è sviluppata per interrompere l’accelerazione e la rigenerazione.
Questo tipo di funzionamento è anche possibile quando il carico rivede il motore durante il carico del carico. La rigenerazione automatica arresta un’eccessiva accelerazione. Il controllo della resistenza al rotore può essere utilizzato per ottenere una migliore coppia di frenata.
La frenata rigenerativa è anche possibile con un motore di cambio di palo quando la velocità è passata da alta a bassa. Può anche essere realizzato in un lettore di frequenza variabile.
Diminendo temporaneamente la frequenza del motore, la velocità sincrona diminuisce e si verificano le condizioni favorevoli alla rigenerazione.
Durante la frenata rigenerativa, c’è la possibilità di velocità pericolose se il punto operativo durante la frenata cade nella parte instabile della caratteristica. Ciò accade se la coppia di carico è maggiore della coppia di guasto del motore.
La coppia sviluppata non può rallentare il motore e ha luogo un’accelerazione eccessiva. Questa possibilità può essere eliminata per mezzo di elevata resistenza nel rotore.
Frenata dinamica
La frenata dinamica viene utilizzata per frenare un lettore non reverinante. Lo statore viene trasferito dai piatti AC del settore ai principali (Fig. 1.48 (a)). La DC che attraversa lo statore installa un campo stazionario. Ciò induce correnti del rotore che producono un paio per portare rapidamente il rotore.
La coppia si è sviluppata e il ritardo durante la frenata può essere controllato dalla quantità di potenza DC. Resistenza aggiuntiva R1 e R2E nello statore e nei circuiti del rotore controllano rispettivamente le coppie di eccitazione DC e frenata.

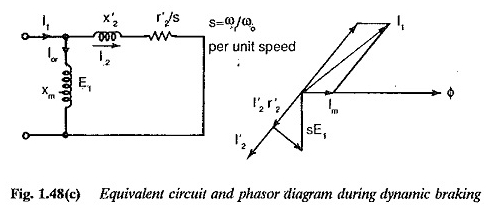
Il circuito equivalente e il diagramma di fase del motore durante la frenata dinamica sono rappresentati nella Figura 1.48 (c). Quando lo statore è alimentato da DC, il prodotto MMF è stazionario. Questo MMF dipende dalle connessioni dello statore per l’alimentazione DC, il numero di giri e la corrente.
Le possibili connessioni dello statore per l’alimentazione DC sono rappresentate nella Figura 1.49. La corrente CC equivalente può essere determinata assimilando gli MMF prodotti da questa corrente equivalente e dalla corrente CA.
La corrente primaria equivalente è responsabile della magnetizzazione e della corrente secondaria della coppia. La coppia è data da

Dov’è un turno.
Del circuito equivalente che abbiamo

Inoltre, dal diagramma di fase, abbiamo
![]()
Da cui può essere determinato l’MI. Il valore di XM è dato da
![]()
La coppia è

La curva di scorrimento della coppia può essere determinata usando questa espressione. La coppia massima si verifica a uno spostamento

E la coppia di frenata massima è

La caratteristica può anche essere disegnata usando la relazione

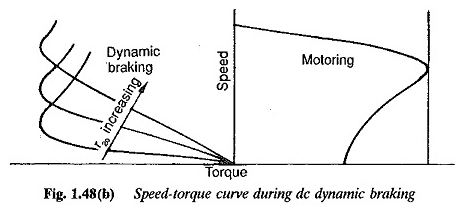
La coppia di frenata è proporzionale a I21. Tuttavia, la saturazione gioca il suo ruolo e c’è una stanchezza di una coppia. L’effetto di R′2 è simile agli effetti durante la guida, vale a dire
Non modifica il valore di TMB, ma modifica il valore della velocità con cui si verifica il TMB. Le tipiche curve di velocità di velocità sono rappresentate nella Figura 1.48.
I valori di I1 e R′2 sono controllati per fornire la frenata desiderata. Il primo è limitato da R1. Questo metodo viene generalmente applicato per rallentare i motori causando carichi attivi. La frenata dinamica viene utilizzata congiuntamente con il controllo automatico. La frenata del motore a induzione è più popolare nei palani rispetto al motore DC, a causa di questa funzionalità.
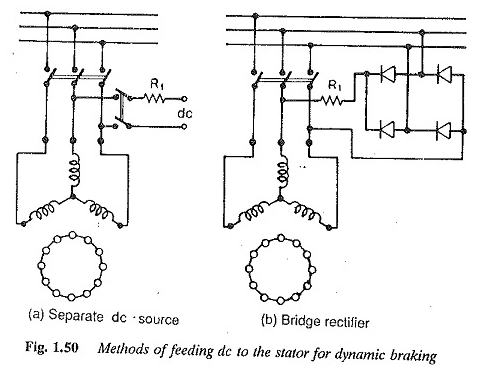
I metodi di alimentazione di un alimentatore diretto statore sono rappresentati in FIG, 1.50. Può essere fornito da un alimentatore CC utilizzando una resistenza limitata R1 nel circuito per controllare l’eccitazione DC. Il controllo della coppia è ottenuto mediante variazione della resistenza al rotore.
In alternativa, un alimentatore può essere rettificato mediante un raddrizzatore del diodo e la DC risultante può essere trasferita al motore.
Nella frenata dinamica AC, lo statore è andato in una banca di capacità. La macchina funziona come un generatore di induzione automatica eccitata. Tutta l’energia meccanica viene dissipata sotto forma di energia elettrica nella resistenza del rotore. Questo metodo non è redditizio, a causa del costo dei condensatori.
Attuale
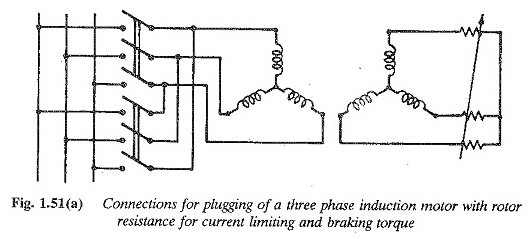
Modificando la sequenza di fase dell’input in una frenata del motore a induzione, lo sterzo del campo dello statore può essere invertito. In pratica, questo viene fatto scambiando l’alimentazione del motore (Fig. 1.51 (a)).
Viene sviluppata la coppia di frenata e il motore riposa molto rapidamente. Il motore deve essere estinto dal settore quando si avvicina la velocità zero. Altrimenti, la coppia sviluppata accelera il motore nella direzione opposta. Questo metodo è anche chiamato plug.
Quando il motore è bloccato, la tensione indotta E nel telaio e la tensione applicata V può essere reciprocamente e la corrente durante la frenata è causata da E + V.
Ciò può portare a correnti molto elevate, che sono limitate da elevata resistenza al rotore e aumentano anche efficacemente la coppia di frenata.
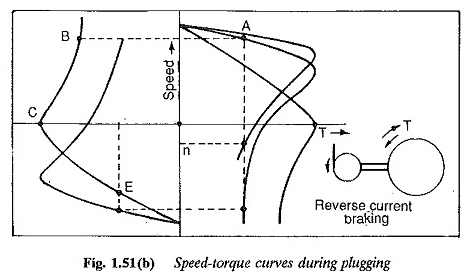
La curva della velocità degli ingranaggi di un motore a induzione può essere modificata variando la resistenza al rotore. Il punto di coppia massimo può essere fatto per verificarsi nella spiaggia del turno 1-2, dove la coppia sviluppata tende a frenare il rotore.
Questa coppia può anche essere utilizzata per fermare la tendenza del rotore ad accelerare per un motivo o l’altro (ad esempio, la revisione del motore o un suggerimento che aumenta la gabbia vuota).
L’alta resistenza viene introdotta nel rotore, in modo che il punto operativo si spostasse al quarto quadrante. La coppia di frenata sviluppata impedisce qualsiasi accelerazione del rotore e il rotore funziona a una velocità uniforme (Fig. 1.51 (b)).
Se il motore funziona a uno spostamento al momento della spina, la coppia di frenatura totale è la somma della coppia di connessione a (2 – s) e la coppia di caricamento

TP può essere controllato da una resistenza al rotore variabile che limita la corrente di frenata.