Freno del motore a induzione dinamica (o frenata reostatica):
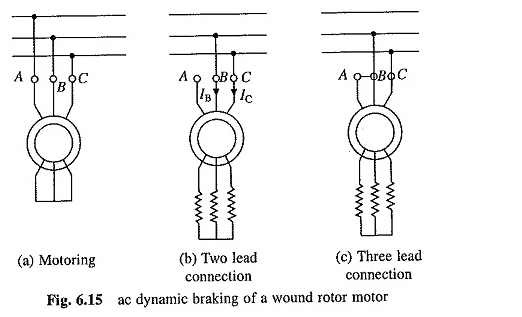
(A) Freno dinamico CA – Braking AC dinamico del motore di induzione si ottiene quando il motore viene eseguito su un alimentatore a fase singola scollegando una fase di origine e lasciandolo aperto (Fig. 6.15 (b)) o collegandolo con un’altra fase della macchina (Fig. 6.15 (c)).
Le due connessioni fico. 6.15 (b) e (c) sono rispettivamente chiamati due e tre connessioni di piombo. Se collegato a un alimentatore a 1 fase, il motore può essere considerato alimentato da una sequenza positiva e negativa in tre fasi delle tensioni.
La coppia netta prodotta dalla macchina è una somma di coppie a causa di tensioni di sequenza positive e negative. Quando il rotore ha un’alta resistenza, la coppia netta è negativa e si ottiene il funzionamento della frenata. L’analisi del motore per due e tre connessioni di piombo viene effettuata come segue:
Due connessioni di piombo: supponiamo che la fase A di un motore collegata in y lì nel circuito aperto. Quindi ia = 0 e ic = -ib. Di conseguenza, i componenti della sequenza positiva e negativa IP e rispettivamente sono forniti da

dove α è dato dall’equazione. (6.17).
Poiché i componenti di sequenza positivi e negativi sono uguali e opposti, due circuiti equivalenti possono essere collegati all’opposizione della serie. La tensione da applicare a questa combinazione seriale sarà

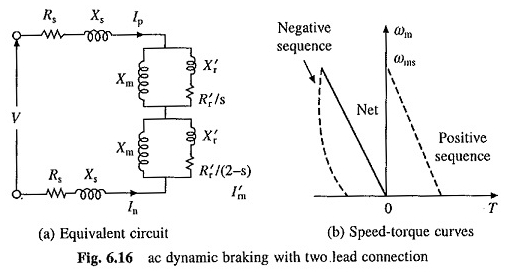
Con una tensione applicata jvbc / √3 Se la corrente è ip = – in = jib / √3, segue solo con una tensione di fase applicata V, la corrente sarebbe ib / √3. Il circuito equivalente può quindi essere disegnato come mostrato nella Figura 6.16 (a).
Sebbene i valori dei componenti di sequenza positivi e negativi della corrente siano uguali, le coppie corrispondenti non lo sono. La natura delle curve di velocità di velocità per le correnti di sequenza positiva e negativa e la coppia netta sono rappresentate nella Figura 6.16 (b).
Per una scelta appropriata di resistenza al rotore, la coppia di frenata può essere ottenuta in tutta la gamma di velocità. Poiché la resistenza al rotore richiesto è grande, la frenata dinamica CA del motore a induzione può essere utilizzata solo nei motori del rotore della ferita.
A questo proposito alle alte velocità (o valori di scorrimento bassi), l’impedenza della parte di un componente di sequenza positivo diventa molto elevata. Poiché i componenti di una sequenza positiva e negativa della corrente devono essere uguali, la coppia di frenata netta è piccola e, quindi, la frenata non è molto efficace.
Collegamento a tre pellet: qui, due fasi della bobina del motore collegato sono collegate in serie in serie con la terza fase (Fig. 6.15 (c)). Lascia le fasi A e B

A differenza di due connessioni di piombo, l’entità dei componenti di una sequenza positiva e negativa della tensione è uguale e non i componenti della sequenza positiva e negativa delle correnti. Il circuito equivalente è illustrato nella Figura 6.17.
Le parti di una sequenza positiva e negativa del circuito sono indipendenti e, pertanto, non è imposta alcuna restrizione nella componente di sequenza negativa della corrente da una parte di sequenza positiva del circuito equivalente.
Pertanto, si ottengono coppie di frenata più elevate (rispetto a due connessioni di piombo) ad alta velocità. La natura della caratteristica della velocità del pulcino con questa connessione è la stessa di quella della Figura 616 (b).
Qualsiasi disuguaglianza tra le resistenze di contatto nelle connessioni di due fasi in parallelo riduce la coppia di frenata e può persino portare a una coppia automobilistica, poiché la condizione tende più a due connessioni di piombo con una resistenza crescente in una delle due fasi (come la resistenza al rotore utilizzato è inferiore alla connessione a due piombo).
Di conseguenza, la connessione a due piombo è generalmente preferita nonostante la sua coppia debole. La principale applicazione di frenatura CA monofase è l’altezza della gru.
(b) Braking autoescificato usando condensatori: in questo metodo, tre condensatori sono costantemente tenuti collegati attraverso i terminali del motore. I valori dei condensatori sono quindi scelti come quando vengono scollegati dalla linea, il motore opera come un generatore di induzione autolessato.
La connessione di frenata è rappresentata nella Figura 6.18 (a) e il processo di auto-eccitazione è spiegato nella Figura 6.18 (b) per nessuna condizione di carica. La curva A non è una curva di magnetizzazione della macchina della macchina a una determinata velocità e la linea B rappresenta la corrente attraverso i condensatori, data da
![]()
dove E è lo statore indotto dallo statore per fase.
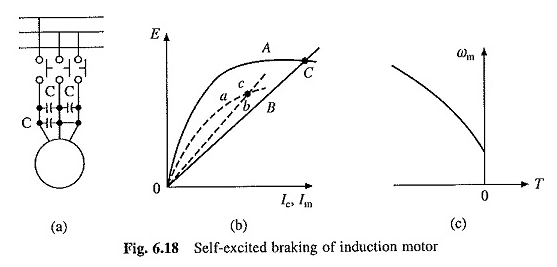
I condensatori forniscono la corrente reattiva necessaria per l’eccitazione. L’operazione si verifica nel punto C che è l’intersezione di due caratteristiche. Quando la velocità diminuisce, si ottiene il valore di E per la stessa corrente di magnetizzazione e si ottiene la nuova caratteristica della magnetizzazione A.
D’altra parte, la pendenza della caratteristica e contro IC aumenta dando una nuova caratteristica B. L’intersezione di due curve ora si verifica c. Pertanto, la riduzione della velocità mentre sposta le curve di magnetizzazione verso il basso, la pendenza della tensione del condensatore rispetto alla curva di corrente aumenta.
A una certa velocità critica, che è generalmente alta, due curve non si incontrano e la macchina non si eccita e la coppia di frenata cade a zero. La caratteristica della velocità del freno autonomo è rappresentata nella Figura 6.18 (c).
A volte, le resistenze esterne sono collegate sui terminali dello statore per aumentare la coppia di frenata e dissipare una certa energia generata fuori dalla macchina. La costruzione della Figura 6.18 (b) è valida solo per qualsiasi operazione di addebito.
Per un’analisi più precisa, la riduzione dell’impedenza motoria deve essere presa in considerazione. Questo diagramma viene utilizzato raramente, perché la coppia di frenata diminuisce a zero a una velocità che è generalmente alta.
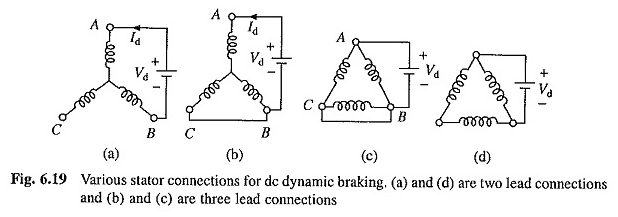
(C) Freno dinamico CC: si ottiene quando lo statore di un motore a induzione che opera a una velocità è collegato a un alimentatore diretto. Due connessioni comunemente usate, due e tre piombo, per connessioni a stella e delta sono rappresentate nella Figura 6.19.
Un metodo per ottenere l’alimentazione DC utilizzando un ponte a diodo per due connessioni di piombo è illustrato nella Figura 6.20.
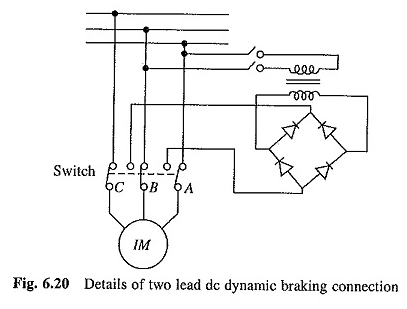
La corrente CC che attraversa lo statore produce un campo magnetico stazionario. Il movimento del rotore in questo campo induce una tensione nel rotore del rotore. La macchina funziona quindi come generatore.
L’energia generata viene dissipata nella resistenza al circuito del rotore, dando così frenatura dinamica del motore a induzione.
Poiché il campo è stazionario, la velocità relativa tra i driver del rotore e il campo è ora ωm. La frequenza di tensione indotta sarà uguale alla frequenza della tensione della sorgente Ca (o alla frequenza del motore nominale) quando ωm = ωms.
O la tensione indotta nel rotore durante la gara a una velocità sincrona. Quando opera a una velocità ωm, la tensione indotta e la sua frequenza saranno rispettivamente Ser e SF. COSÌ

Ciò fornisce un circuito equivalente nella fase della Figura 6.21 (a) per il rotore. La divisione di tutte le quantità per s produrrà un circuito equivalente alla frequenza nominale.
In riferimento a vari parametri di circuito equivalenti, così ottenuti dalle torri dello statore, fornisce un circuito equivalente nella fase del rotore illustrato nella Figura 6.21 (b). Il circuito equivalente dello statore sotto la frenata DC dinamica del motore di induzione è illustrato nella Figura 6.21 (c).
Per combinare con un circuito del rotore equivalente nella Figura 6.21 (b), dobbiamo prima ottenere un circuito equivalente per fase dello statore alla frequenza nominale. Circuito equivalente Fig. 6.21 (c) suggerisce che lo statore MMF è costante e indipendente dalla velocità.
Immaginiamo quindi che lo statore sia alimentato da una fonte di potenza bilanciata a tre fasi di frequenza nominale, dando una corrente di fase. L’attuale CA è equivalente all’ID a condizione che produca MMF statore della stessa ampiezza dell’ID corrente CC.
Pertanto, sostituiamo uno statore MMF stazionario prodotto dall’ID corrente CC con un MMF (prodotto da IS) di ampiezza identica ma ruotando a velocità sincrona.
La differenza di questi due MMF sarà un MMF a Gap d’aria che sarà responsabile della produzione di Air Gap che, a sua volta, provoca la tensione della frequenza nominale indotta nello statore. Il circuito equivalente nella fase dello statore alla frequenza nominale assume quindi la forma illustrata nella Figura 6.21 (d).
La combinazione di circuiti equivalenti di Fig. 6.21 (6) e (d) e il ritiro del trasformatore fornisce una frequenza nominale per circuito equivalente in fase (Fig. 6.21 (e)).

È piccolo per piccoli S, e quindi approcci IM. A causa di un alto valore di messaggistica istantanea, il circuito magnetico è saturo. Pertanto, XM non è costante ma varia con IM. Per un’analisi precisa, la variazione di XM con IM deve essere presa in considerazione.
La relazione tra IS e ID dipende dalla connessione dello statore. Ad esempio, lo deriviamo per le due connessioni di piombo nella Figura 6.19 (a). Qui ia = id e ib = – id.
Se N è un numero effettivo di giri in ciascun avvolgimento, il massimo MMF prodotto dalla fase A sarà IDN e il massimo MMF prodotto dalla fase B sarà (-idn). Supponendo che questi MMF siano distribuiti sinusoidalmente nello spazio, il risultato del MMF risultante sarà
Quando la macchina è alimentata da una sorgente di corrente a tre fasi bilanciata, il picco MMF dello statore è

È equivalente all’ID quando f = f ‘. Pertanto, dalle equazioni. (6.35) e (6.36)
![]()
I valori di sono per altre connessioni (Fig. 6.19 (b), (c) e (d), rispettivamente) sono:
![]()
La caratteristica della velocità di Torca viene calcolata come segue.
Dal circuito equivalente della Figura 6.21 (e)
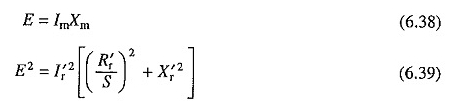
Considera la distribuzione delle correnti tra i rami paralleli formati da XM e il rotore

Sottrazione dell’equazione. (6.39) da (6.40) rendimenti

Dell’equazione (6.39)

La coppia del motore è

Poiché XM dipende dall’IM, EQ. (6.38) – (6.42) sono equazioni algebriche non lineari. L’uso dei seguenti passaggi evita la necessità di una soluzione digitale. Supponiamo che un valore IM, ottenga e corrispondente dalla caratteristica della magnetizzazione, calcola XM dall’equazione.
(6.38), ottenere la R da (6.41), calcolare S da (6.42) quindi ωm e T dalle equazioni. (6.34) e (6.43), rispettivamente.
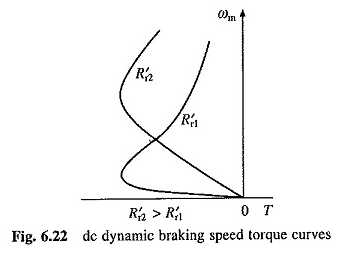
La Figura 6.22 mostra la natura delle curve di coppia di velocità per due valori di resistenza al rotore. In un motore a gabbia scoiattolo o in un motore del rotore delle ferite senza resistenza esterna nel rotore, la coppia massima si verifica a bassa velocità.
Mentre la coppia massima è indipendente dalla resistenza del rotore, la velocità con cui si verifica la coppia massima aumenta con la resistenza al rotore. Quando Fig.
6.22 frenatura dinamica DC della velocità del motore a induzione Curve di coppia è necessaria una frenata rapida, la resistenza sensazionale è collegata nel circuito del rotore e viene tagliata quando la velocità cade.
Se utilizzato per mantenere un carico attivo, come negli avvolgitori, è collegata un’alta resistenza per ottenere curve di accelerazione con una pendenza negativa, al fine di garantire la stabilità nello stato di equilibrio.
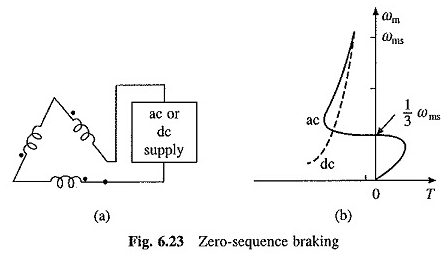
(D) Zero Sequence Free: In questa frenata, tre fasi dello statore sono collegate in serie attraverso una FAGGIO a fase singola o una sorgente CC come mostrato nella Figura 6.23 (A). Tale connessione è nota come connessione a sequenza zero, poiché le correnti in tutti i punti salienti dello statore sono co-piattaforma.
L’MMF causato da correnti di country (o sequenza zero) produce un campo magnetico tre volte il numero di poli per i quali la macchina è davvero arrotolata. Con un alimentatore CA, il campo risultante è stazionario nello spazio e va alla frequenza dell’alimentazione.
Con l’alimentazione DCE, il campo risultante è stazionario nello spazio ed è di grandezza costante. Un vantaggio importante di questa connessione è il carico uniforme di tutte le fasi dello statore. La natura delle curve di velocità di velocità per l’alimentazione AC e CC è illustrata nella Figura 6.23 (b).
Con la fornitura di corrente alternata, la frenata può essere utilizzata solo fino a un terzo della velocità sincrona. Tuttavia, le coppie di frenata prodotte da questa connessione sono considerevolmente maggiori dell’automobile. Il motore opera principalmente in frenata rigenerativa.
Per i motori a bassa resistenza al rotore, viene recuperata una parte importante dell’energia generata. A differenza della frenata AC dinamica del motore a induzione, non richiede elevata resistenza al rotore e può quindi essere utilizzato entrambi – con motori scoiattoli e motori roton.
Con l’alimentazione, la frenata è disponibile in tutta la gamma di velocità. È essenzialmente una frenata dinamica perché tutta l’energia generata viene sprecata nella resistenza al rotore.
La disposizione di commutazione, dal funzionamento a tre fasi a zero normale, è estremamente semplice quando il motore ha uno statore delta collegato.