Elettrico privo di motori a induzione polifase:
Frenata elettrica di motori a induzione polifase che consistono in diversi tipi, vale a dire
- Branchage (o frenata controcorrente)
- Frenata dinamica (o reostatica)
- Frenata rigenerativa
1. Branchage (o frenata contro la marea)
La spina può essere realizzata in un motore a induzione semplicemente invertendo due delle tre fasi che causano la direzione del campo magnetico rotante.
Quando si cambia il motore in posizione plug -in, il motore funziona nella direzione opposta a quello del campo e la velocità relativa è circa due volte [(2 – s)] di velocità sincrona, vale a dire, lo spostamento è quasi uguale a due, essendo uguale a (2 – s).
La tensione indotta nel rotore sarà quindi due volte di tensione normalmente indotta all’arresto e l’avvolgimento deve essere fornito con un isolamento aggiuntivo per resistere a questa grande tensione.
Durante il periodo di connessione, il motore funge da freno e assorbe l’energia cinetica del carico sempre rotante causando la caduta nella sua velocità. La potenza PMECH associata viene dissipata sotto forma di calore nel motore.
Allo stesso tempo, il rotore continua anche a disegnare la potenza dallo statore che viene anche dissipata sotto forma di calore. A causa dell’aumento della frequenza del rotore, ci sono ulteriori perdite di ferro nel rotore.
Pertanto, il calore sviluppato nel rotore durante il periodo di frenata è circa tre volte il calore sviluppato durante il periodo di partenza (o in uno stato di rotore bloccato).
Le dimensioni del motore di induzione in cui la spina deve essere applicata non è quindi decisa caricando le condizioni da sole ma anche mediante condizioni di frenata.
In caso di un motore a gabbia scoiattolo, l’energia viene dissipata interamente nella macchina; Mentre in caso di motore a rotore della ferita, questa energia viene anche dissipata nella resistenza esterna aggiunta nel circuito del rotore a tale scopo.
Le condizioni di frenatura elettrica dei motori a induzione della polifase possono essere studiate considerando le curve di grida del motore del motore quando sono estese oltre il punto del 100%, come mostrato nella Figura 1.103 (a).
L’ordinata al punto B rappresenta la coppia al momento della spina e possiamo vedere che la coppia sta gradualmente aumentando man mano che il motore si avvicina all’arresto, dopo di che, naturalmente, se la linea di alimentazione non è scollegata, si riconnetterà nuovamente nella direzione opposta secondo la velocità ordinaria delle curve di coppia da A a O.
Pertanto, vediamo che per riportare indietro il motore, è essenziale scollegare l’alimentazione al motore a velocità zero.

Dalle curve di scorrimento della coppia mostrate nella Figura 1.103 (a), si osserva che l’estensione della coppia di frenata è molto bassa rispetto alla coppia massima esercitata dal motore. Ciò è particolarmente quindi per la bassa resistenza del rotore.
Poiché sempre più resistenza viene inserita nel circuito del rotore, la coppia massima si verifica a valori crescenti.
Questo è il motivo per cui i motori a induzione della gabbia scoiattolo, che sono progettati principalmente per la massima efficienza e, pertanto, a bassa resistenza non sono adatti a tale tipo di frenata.
In caso di driver del rotore delle ferite, l’aggiunta di resistenza nel circuito del rotore dà origine a una coppia di frenata sempre più e, quindi, i driver del rotore delle ferite sono più adatti alla spina.
Se la variazione della resistenza al rotore viene regolata per regolare che la coppia di frenatura massima viene esercitata ovunque, la frenata ottimale verrà raggiunta almeno

L’espressione della coppia di frenata che trascura l’impedenza dello statore e la reattanza magnetizzante, può essere dedotta e viene data come

La corrente del rotore può essere determinata durante il periodo di frenata dalla seguente relazione ed è tracciata, come mostrato nella Figura 1.103 (b).

O
- E2 è l’EMF induce in ciascuna fase del rotore a una fermata,
- R2 è la resistenza al rotore per fase e
- X2 è la reattanza della fermata del rotore per fase e
- S è il turno.
Durante il periodo di beatitudine, poiché l’EMF induce nel rotore è molto elevato, come già indicato sopra, la corrente del rotore e la corrente dello statore sono quindi molto elevate. Tuttavia, la corrente di frenata può essere ridotta inserendo una resistenza esterna nel circuito del rotore.
Anche da questo punto, i driver del rotore delle ferite sono benefici rispetto ai motori del rotore della gabbia scoiattolo.
I motori a gabbia di una presa di circa 20 kW sono collegati direttamente, utilizzando la connessione a stella se viene fornito un interruttore a stella-delta. I motori più grandi necessitano di resistenza allo statore. I motori del rotore della ferita usano resistori del rotore per la limitazione della corrente e lo sviluppo di coppie di frenata più elevate.
Possono verificarsi problemi di valutazione termica per frequenti diritti di frenata, come già spiegato sopra, e i contattori possono richiedere una manutenzione frequente.
L’inversione simultanea delle connessioni dello statore e l’inclusione della resistenza al rotore nei motori della radice delle ferite sono del tutto possibili, ma lo stesso effetto può essere ottenuto includendo satuatori negli avvolgimenti del rotore.
In alternativa, una gabbia a rotore a barra profonda può dare un aumento della resistenza effettiva del rotore dopo il funzionamento della spina perché la frequenza di scorrimento viene improvvisamente aumentata da SF a (2 – s) F dove F è la frequenza di alimentazione.
In pratica, per invertire i dischi in cui la frenata e l’avvio del motore di induzione nella direzione opposta includono i passaggi dello stesso processo continuo, la spina viene utilizzata a livello vantaggioso.
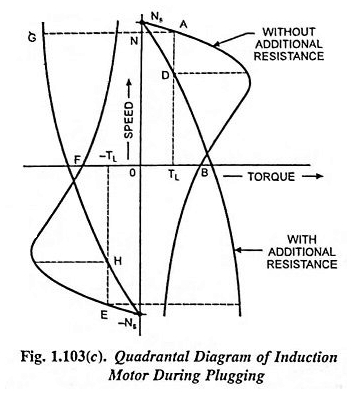
Il funzionamento plug -in può anche essere spiegato utilizzando un diagramma quadrante mostrato nella Figura 1.103 (c). Le caratteristiche della velocità di velocità mostrate nella Figura 1.103 (c) sono in realtà un’estensione delle caratteristiche del motore nel secondo e nel quarto quadrante. La spiegazione della Figura 1.103 (c) è esattamente identica a una per la Figura 1.94 (a) o 1.94 (b).
2. Braking dinamico (o reostatico)
In questa frenata elettrica dei motori a induzione polifase, la frenata reostatica può essere ottenuta scollegando l’avvolgimento dello statore di alimentazione CA e mediante eccitante una fonte CC per produrre un campo CC stazionario.
Nella frenata reostatica, l’avvolgimento dello statore viene utilizzato come avvolgimento in campo CC e l’avvolgimento del rotore come avvolgimento del telaio. Con una macchina del rotore della ferita, è possibile inserire resistenze esterne nel circuito del rotore per fornire un carico. Con le macchine a gabbia scoiattolo, tuttavia, il rotore del rotore stesso deve formare il carico.
La fonte di eccitazione può essere fornita da una sorgente CC indipendente o dal settore AC attraverso un insieme di rettificatori del trasformatore, come mostrato nella Figura 1.105.
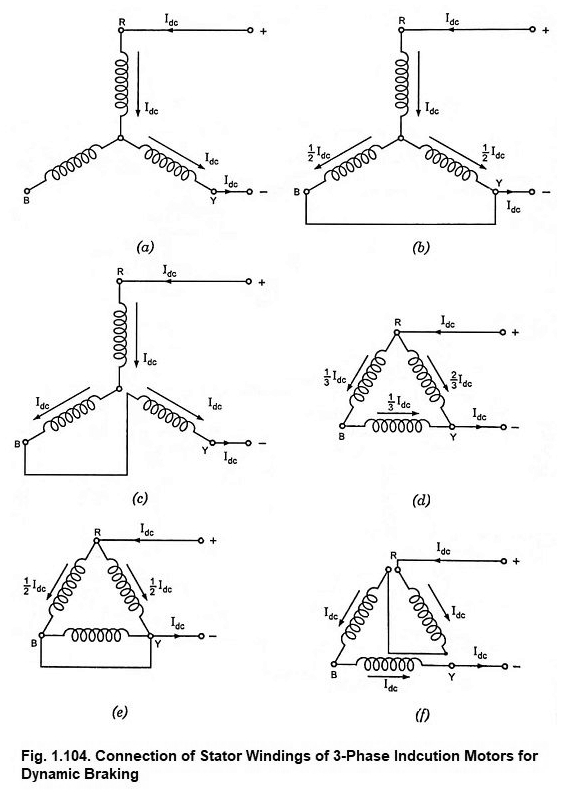
Vari metodi di collegamento dello statore a una sorgente CC sono rappresentati nella Figura 1.104. Sebbene le connessioni mostrate in Fig. 1.104 (c) e 1.104 (f) forniscono una corrente uniforme delle tre fasi ma siano complicate nel funzionamento di commutazione.
Essendo più semplici a questo proposito, le connessioni mostrate in Fig. 1.104. (a) e (b) sono generalmente utilizzati.

Un tipico diagramma di connessione è riportato nella Figura 1.105; La macchina funziona come un motore con i contattori chiusi, mentre con la chiusa aperta e B, una corrente continua è fornita da due fasi dello statore, la terza viene lasciata in un circuito aperto.
La resistenza R ‘viene inserita nel circuito dello statore per limitare la sua corrente. In caso di motori del rotore della ferita, viene inserita un’ulteriore resistenza nel circuito del rotore per controllare l’effetto di frenata.
Mentre la macchina funziona normalmente sotto forma di un motore, il suo statore di campo magnetico funziona a una velocità sincrona nella stessa direzione di quella del rotore, ma leggermente più veloce dei conduttori del rotore.
Quando gli avvolgimenti dello statore vengono disconnessi dalla potenza CA ed eccitati con DC, il campo magnetico prodotto sarà immobile nello spazio, rendendo i conduttori del rotore che superano il campo con una velocità (1 – S) NS o SNS.
Le correnti indotte nei driver del rotore si opponeranno alla direzione di quella corrispondente all’operazione automobilistica, producendo una coppia di frenata.
Sebbene il flusso di gap d’aria sia stazionario, ci sarà lo stesso numero di poli di quando la macchina è eccitata con AC e le correnti del rotore avranno quindi una frequenza che è vicina alla frequenza corrispondente alla velocità sincrona (vale a dire NS) inizialmente, ma che diminuisce con la velocità del rotore e diventa zero a livello stand, è la frequenza dei rotori.
Allo stesso modo, l’EMF indotta nel rotore diminuisce di un massimo quando il rotore viene eseguito, a zero all’arresto.
In altre parole, l’EMF indotta nel rotore sarà somministrata da SE2 dove E2 è l’ampiezza dell’EMF indotta nel rotore quando corre davanti al campo a velocità NS.
Si vede quindi che le condizioni del rotore durante la frenata reostatica della DC con la velocità che cade da sincrona a fermata è quasi la stessa di quando il motore accelera normalmente.
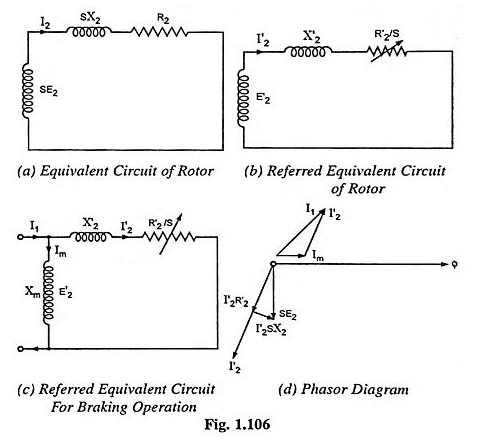
Di conseguenza, il circuito equivalente del rotore può essere rappresentato come indicato nella Figura 1.106 (a). Dividendo la tensione e l’impedenza per s, abbiamo il circuito illustrato nella Figura 1.106 (b) che trasporta la stessa corrente I2.
Poiché l’avvolgimento dello statore trasporta solo una corrente continua, l’induttanza dello statore non ha alcun effetto ai sensi dell’operazione nel regime permanente. La tensione CC applicata attraverso l’avvolgimento dello statore è fissata solo dalla resistenza all’avvolgimento dello statore. Non ci sarà alcuna perdita di ferro nel nucleo dello statore.
Ma la perdita del nucleo del rotore sarà di notevole grandezza e, pertanto, il valore di resistenza al rotore restituito allo statore, che determina la coppia sviluppata durante la frenata, deve essere corretta per tenerlo conto, l’EMF induce nel rotore, alla velocità di sincronia, E’2 verrà fornita dall’IMXM dove rappresenta la magnetizzazione che passa attraverso la reazione della magnetizzazione.
Il circuito illustrato nella Figura 1.106 (b) può essere modificato in un circuito illustrato nella Figura 1.106 (c). Il diagramma di fase corrispondente a questo circuito modificato è illustrato nella Figura 1.106 (d),
Si può notare che la corrente del rotore si alterna come è prodotta da un flusso costante, causato da un MMF imn1 magnetizzante, che rimane stazionario nello spazio.
Tuttavia, se visto dal rotore, il magneticatore MMF e il flusso risultante nello statore sembreranno alternare.
Inoltre, poiché le controversie dell’ampère del rotore I2N2 (= I′2N1) devono essere bilanciate dai Tatori dell’Ampère dello statore per mantenere le torri di magnetizzazione IMN1, le torri dello statore I1N1 come rotore, rappresentano la somma fasulla di IMN1 e I′2N1.
La corrente di corrente alternata I1 dipende dall’ampiezza della corrente continua trasportata dallo statore e dalla natura delle connessioni di avvolgimento dello statore, come spiegato sopra.
Dalla discussione di cui sopra, si può concludere che il funzionamento del motore durante la frenata reostatica DC può essere analizzato usando il circuito equivalente (il tipo di cui siamo già familiari) mostrato nella Figura 1.106 (c).
La coppia di frenata può essere determinata dalla relazione
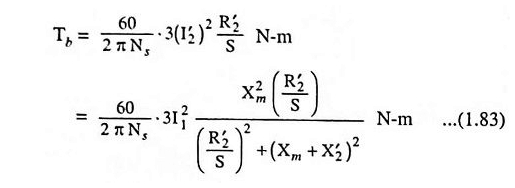
L’equazione di cui sopra ci consente di determinare la coppia di frenatura a qualsiasi velocità di un determinato motore di induzione, quando è eccitata dalla corrente continua, I1 corrispondente a un CA equivalente, che avrebbe prodotto lo stesso MMF di quello dalla corrente reale trasportata dagli avvolgimenti dello statore.
Differenziando l’equazione. (1.83) WRT S e assimilarlo a zero per un massimo, abbiamo uno spostamento corrispondente alla coppia di frenata massima

e una coppia massima,

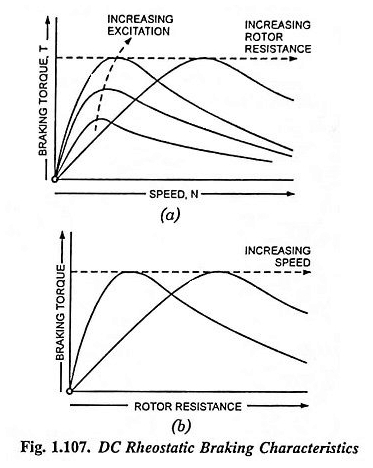
Le caratteristiche tipiche delle prestazioni di un motore a induzione sono illustrate nella Figura 1.107.
L’ampiezza della coppia di frenatura sviluppata dal motore dipende dall’eccitazione (resistenza del campo sviluppato dal rullo dello statore), dalla resistenza del circuito del rotore e dalla velocità del motore.
L’effetto della variazione dell’eccitazione I1 e della resistenza R2 del rotore è anche illustrato nella Figura 1.107 (a). Ai fini del design, vengono talvolta utilizzate le curve di resistenza al rotore della coppia illustrate nella Figura 1.107 (b).
Con l’aumento della resistenza al rotore RO2, la velocità con cui aumenta anche la coppia di frenata massima. Tuttavia, la coppia massima non aumenterebbe in proporzione al quadrato di corrente (I21), come indicato dall’equazione.
(1,85), poiché la reattanza di magnetizzazione XM diminuisce a causa della saturazione causata da un aumento della corrente I1.
L’operazione di frenatura stabile si trova sulla parte Steeway della curva della velocità di coppia [vale a dire sul lato sinistro della posizione massima di coppia nella Figura 1.107 (a)].
Se inavvertitamente, la velocità sale al di sopra di ciò alla quale la coppia è massima, un nuovo aumento della velocità è causato da una diminuzione della coppia di frenata, che può portare a un nuovo aumento della velocità nel caso di un carico di riferimento.
All’inizio dell’applicazione di frenata, abbiamo quindi bisogno di elevata resistenza nel circuito del rotore, che deve essere gradualmente ridotto con una diminuzione della velocità.
La coppia di frenata può essere controllata da uno o i seguenti due metodi: (i) controllando il du du du du du du duc (ii) variando la resistenza al rotore.
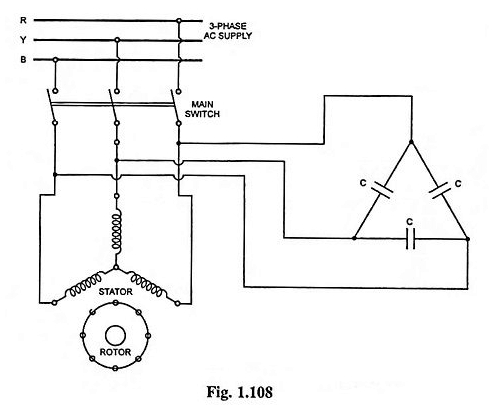
La frenata AC dinamica può essere ottenuta con auto-eccitazione collegando gli avvolgimenti dello statore a una banca di condensatori statici, come mostrato nella Figura 1.108. In questo caso, la macchina a induzione funziona come un generatore di induzione che riceve la sua eccitazione CA dai condensatori statici.
L’energia elettrica generata viene dissipata sotto forma di calore nel circuito del rotore. La frenata Dynamic AC non è popolare a causa del costo relativamente elevato delle banche dei condensatori.
La frenata DC dinamica richiede poca potenza dell’alimentazione e fornisce una coppia di frenatura liscia, utile per gli avvolgimenti di estrazione e elevati carichi di inerzia.
I suoi vantaggi rispetto alla spina sono l’assenza del campo opposto di rotazione della rotazione [e, quindi, nessuna tendenza alla macchina a correre indietro] e una perdita di rotore inferiore. Aumentando la resistenza al rotore, la coppia di frenata può essere resa più efficace a velocità più elevate.
Questo metodo è quindi molto adatto per le spese di revisione in ritardo. In caso di motore a gabbia scoiattolo, poiché la resistenza al rotore è piccola, applicherà la coppia di frenata a velocità molto basse e, quindi, utile solo per portare il carico.
L’avvento del controllo automatico della frenata dinamica nella frenata elettrica dei motori a induzione in polifase utilizzando sistemi ad anello chiuso, ha reso i motori a induzione più popolari dei motori DC, in particolare per impiegare dischi nei palani minerari.
La Figura 1.109 mostra le caratteristiche quadranti del motore di induzione in condizioni di frenata dinamica.

3. Braking rigenerativo
La frenata rigenerativa è una caratteristica intrinseca di un motore a induzione, in quanto funziona come generatore di induzione quando si estende a velocità al di sopra del sincrono e restituisce energia alla linea elettrica.
Il motore a induzione a tre fasi può essere progettato per funzionare ad alta velocità a velocità sincrona utilizzando uno dei seguenti processi.
- Vai a una fornitura a bassa frequenza nei motori a induzione controllati in frequenza per ridurre la velocità operativa del lettore.
- Movimento verso il basso di un meccanismo di sollevamento caricato come gru, paesi, escavatori, ecc.
- Vai a un’operazione polare più grande da un più piccolo nei motori a gabbia scoiattolo a più velocità.
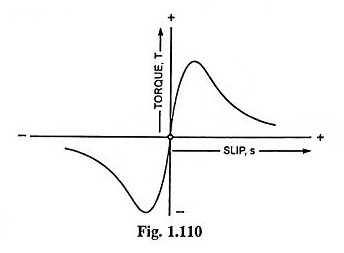
In tutti i processi di cui sopra, lo spostamento e la coppia sviluppati diventano negativi, come mostrato nella Figura 1.110, e quindi la macchina funge da generatore, ricevendo energia meccanica e ripristinandolo al sistema di alimentazione sotto forma di energia elettrica.
Se il carico provoca il motore al di sopra della velocità sincrona, non è richiesta alcuna operazione di commutazione. Una volta che la macchina è guidata sopra la velocità sincrona, l’operazione di frenatura si avvia automaticamente.
Il punto operativo dipenderà dall’ampiezza della coppia di carico e dalla natura della caratteristica della velocità di coppia della macchina durante l’operazione di generazione.
Variando la resistenza nel circuito del rotore, è possibile funzionare a qualsiasi velocità al di sopra della velocità sincrona durante la frenata.
Nel caso in cui la coppia di caricamento del carico superi la coppia di frenata massima, la cui macchina è in grado, il sistema diventa instabile e la velocità aumenterà ulteriormente, probabilmente a un valore disastroso, perché più la macchina funzionerà rapidamente, il minimo sarà sviluppato la coppia di frenata.
Nel caso di un motore a induzione della gabbia scoiattolo, una velocità stabile si ottiene a una velocità considerevolmente superiore alla velocità sincrona e la frenata rigenerativa può essere applicata solo se il motore è appositamente progettato per resistere alla velocità eccessiva.
La frenata rigenerativa ha lo svantaggio della possibilità di frenare solo a velocità super sincroni e, di conseguenza, Seldome è usato per la frenata.
Questo metodo di frenatura elettrica dei motori a induzione polifase può essere utilizzato solo nel tipo di meccanismo di sollevamento o con un motore a gabbia da scoiattolo a più velocità. È anche vantaggioso sulle ferrovie di montagna.
Ritorna circa il 20% dell’energia totale in determinate gare ferroviarie e risparmia un sacco di vestiti per le scarpe da freno.