Inizio dell’addestramento motorio a induzione:
L’avvio della disposizione dell’addestramento del motore a induzione è scelto in base ai requisiti di carico e alla natura dell’alimentazione (bassa o rigida). Potrebbe essere necessario avere le seguenti caratteristiche:
- Il motore deve sviluppare abbastanza coppia di partenza per superare l’attrito, il caricamento della coppia e l’inerzia del sistema di carico del motore e quindi completare il processo di avvio entro un tempo prescritto.
- L’ampiezza della corrente iniziale deve essere tale da non causare il surriscaldamento della macchina e non causa il calo della tensione di origine oltre un valore autorizzato.
Di solito, un motore si disegna da 5 a 7 volte la corrente nominale durante l’inizio -up.
Quando la coppia di caricamento durante l’avvio -UP e l’inerzia del carico del motore non è importante, l’inizio del processo di addestramento del motore di induzione viene completato in pochi secondi e, pertanto, la temperatura del motore non supera il valore autorizzato.
In tali applicazioni, il motore può sempre essere avviato direttamente online, a condizione che il calo della tensione causata da una grande corrente iniziale non sia oltre un valore autorizzato. Per i piccoli motori, la caduta di tensione nel tubo di alimentazione è generalmente al di sotto del livello accettabile.
Quando il motore è di grande capacità e / o nutrito da un sistema basso, un determinato dispositivo di partenza diventa necessario per ridurre la corrente iniziale. In queste applicazioni, non importa se la riduzione della corrente iniziale è accompagnata da una riduzione della coppia di partenza.
Quando la coppia di carico durante l’inizio, è elevata o l’inerzia del carico è importante, l’inizio del processo di addestramento del motore a induzione richiede molto tempo. Se il motore trasporta una corrente significativa durante l’avvio -UP, verrà danneggiato a causa del surriscaldamento. Pertanto, il motore non può essere avviato direttamente online.
In questi casi, vengono utilizzati i metodi di avvio -up che consentono una diminuzione della corrente iniziale senza diminuzione della coppia di avvio. In alcune applicazioni, potrebbe essere necessario un aumento della coppia di avvio accompagnato da una diminuzione della corrente iniziale.
In un motore a gabbia scoiattolo, alcune misurazioni per migliorare le prestazioni di partenza possono. Essere preso allo stadio di progettazione, come nel caso degli alti motori a gabbia scoiattolo e con una barra profonda e una doppia gabbia. Se necessario, i metodi utilizzati per avviare i motori con gabbia scoiattolo sono:
- Star-Delta Starter
- Starter del trasformatore automatico
- Starter del reattore
- Starter di reattore saturabile
- Parte di parzialmente
- AVVERTER AC TENSIONE DELLA TENSIONE
- L’antipasto di resistenza al rotore viene utilizzato per avviare il motore del rotore della ferita:
I metodi (1) – (5) e (7) sono descritti qui e il metodo (6) in secco. 6.11.
Star-Delta Starter:

In questo metodo, un motore a induzione progettato per funzionare normalmente con la connessione delta è collegato come stella durante l’avvio -up. Ciò riduce la tensione dello statore e la corrente di 1 / √3.
Poiché la coppia del motore è proporzionale al quadrato della tensione del terminale dello statore, la coppia di avvio -up viene ridotta a terzi. Un circuito per la startup a stella-delta è illustrato nella Figura 6.7. Gli interruttori CBM e CD sono chiusi per avviare la macchina con la connessione a stella. Quando viene raggiunta la velocità di velocità permanente, la CBS è aperta e CBR è chiusa per collegare la macchina in delta.
Starter del trasformatore automatico:
Una tensione ridotta per avvio -UP può anche essere ottenuta da un trasformatore automatico. Per una svolta secondaria a una svolta primaria, la tensione del terminale del motore e la corrente dello statore sono ridotti di AT. Ciò riduce l’attuale trainata dall’alimentazione di A2T.
Poiché la coppia è proporzionale al quadrato di tensione del terminale del motore, è anche ridotta di A2T. Una volta accelerato il motore, è collegato alla tensione di potenza completa. Un circuito di avvio del trasformatore automatico è illustrato nella Figura 6.8 (a). Innanzitutto, la CBS1 è chiusa seguita da CBS2.
Quando il motore ha accelerato a tutta velocità, CBS2 è aperto e CBM chiuso. CBS1 è ora aperto per scollegare l’auto-trasformatore alimentare.
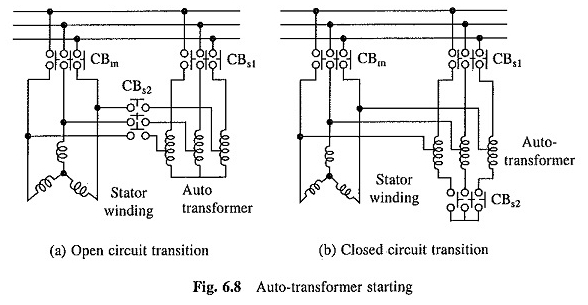
Transizione a circuito chiuso:
Nei metodi di avvio di Star-Delta e auto-trasformatore, il passaggio dalla bassa tensione a una connessione a piena tensione disturba il flusso di corrente dello statore e il campo dello statore collassa. La corrente del rotore continua a fluire a causa del suo grande tempo costante.
Il campo prodotto dalle correnti del rotore induce tensioni negli avvolgimenti dello statore. La fase di tensione indotta è indipendente dalle tensioni di alimentazione. Una grande corrente di corrente viene prodotta al momento della riconnessione quando indotta e le tensioni di alimentazione sono fuori fase.
Quando la corrente di corrente non è accettabile, viene utilizzata la transizione del circuito chiuso. Uno schema di transizione a circuito chiuso per un avviatore di trasformatore automatico è illustrato nella Figura 6.8 (b). Usa tre interruttori: CBS1, CBS2 e CBM.
Il primo CBS2 è chiuso per chiudere la connessione a stella di auto-trasformata. CBS1 è chiuso in seguito. Questo completa la connessione a bassa tensione dell’auto-trasformatore e il motore si avvia. Una volta raggiunta la velocità, il circuito del circuito del circuito CBS2 è aperto.
Il motore ora funziona con la parte superiore degli avvolgimenti della fase del trasformatore automatico in serie con lo statore. Gli avvolgimenti funzionano semplicemente come reattori seriali. D’ora in poi, il CBM dell’interruttore a circuito è chiuso, che bypassa i reattori della serie e collega il motore direttamente all’alimentazione.
All’inizio dell’avvio alternativo, il primo CBS1 è chiuso anziché CBS2. Quindi, il motore e il trasformatore non produrranno contemporaneamente la sovratensione della corrente di magnetizzazione.
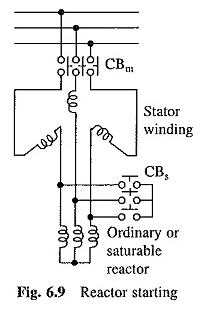
Starter del reattore:
La corrente iniziale -up può anche essere ridotta collegando un reattore a tre fasi in serie con statore.
Quando il motore raggiunge la massima velocità, il reattore viene bypassato. La Figura 6.9 ha mostrato un tale diagramma. CBM è chiuso per avviare la macchina. Una volta raggiunta la massima velocità, la CBS è chiusa al corto circuito il reattore. È vantaggioso collegare il reattore all’estremità neutra dell’avvolgimento dello statore.
Ciò riduce al minimo la sua tensione e mantiene anche la sua tensione e la tensione CBS di interruttore di circuito con potenziale neutro durante il funzionamento del motore normale.
Inizio dell’uso morbido del reattore Satuble:
In alcune applicazioni, la coppia iniziale deve essere controllata senza passo. Ad esempio, nelle macchine tessili, deve essere variata delicatamente, altrimenti i fili delle fibre si romperanno durante l’inizio -up. Tale disposizione iniziale si chiama Smooth Start -Up.
Il diagramma del controller di tensione del tirista è ora ampiamente utilizzato per Start -Up. Un certo numero di dischi esistenti utilizza anche un avviatore reattore satuabile in cui un reattore satuabile a tre fasi è collegato in serie con lo statore. Il reattore di saturazione ha un avvolgimento di controllo DC.
La reattanza del reattore Satuble può essere variata senza passo modificando la corrente dell’avvolgimento di controllo. Per inizio -Up, la reattanza è inizialmente definita al valore più alto. La coppia iniziale -up è vicina allo zero. La reattanza è ora ridotta senza intoppi aumentando la corrente dell’avvolgimento di controllo.
Questo dà una variazione senza stadio della coppia iniziale. Pertanto, il motore inizia senza scrutare e accelerare delicatamente.
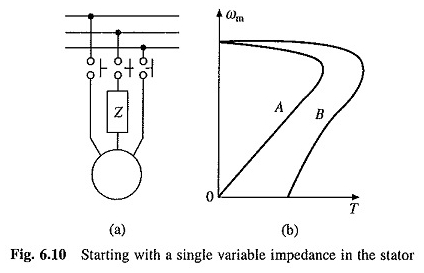
Diagramma di avvio sbilanciato per inizio flessibile:
Per start -Up senza funzione, è possibile utilizzare anche un’alternativa più economica mostrata nella Figura 6.10 (a). È costituito da un’impedenza Z variabile Z in una delle fasi della macchina.
Quando l’impedenza è molto elevata, la macchina funziona con una singola fase e la sua caratteristica del trama della velocità è simile alla caratteristica della Figura 6.10 (b), con una coppia di partenza zero.
Quando l’impedenza viene completamente rimossa, la curva della coppia di velocità è simile alla caratteristica B, che è la caratteristica naturale della macchina. Per i valori di impedenza intermedia, la curva di velocità di velocità si trova tra le curve A e B.
Un inizio fluido, senza shock, viene raggiunto quando l’impedenza è controllata senza passo. L’impedenza può essere una resistenza variabile o un reattore satuabile a fase singola.
Il motore funziona con tensioni di statore sbilanciate, pertanto le perdite di rame sono in aumento. Pertanto, questo diagramma è adatto solo a una breve operazione.
Inizio della parte dell’avvolgimento:
Alcuni motori a gabbia da scoiattolo hanno due o più avvolgimenti di statore collegati in parallelo durante il normale funzionamento. Inizialmente, è collegato un singolo avvolgimento. Ciò aumenta l’impedenza dello statore e riduce la corrente iniziale. Un tale schema di partenza si chiama l’inizio del gioco.
La sua implementazione per una macchina con due avvolgimenti dello statore è illustrata nella Figura 6.11. La macchina inizia con l’avvolgimento 1 quando CBM è chiuso. Una volta completata la velocità, la CBS è chiusa per collegare l’avvolgimento 2.

Starter di resistenza al rotore:
I motori del rotore delle ferite sono generalmente avviati mediante collegamento di resistori esterni nel circuito del rotore (Fig. 6.12 (a)). Il valore di resistenza più elevato viene scelto per limitare la corrente a una velocità zero nella scommessa sicura.
Man mano che il motore accelera, le sezioni della resistenza esterna vengono tagliate una per una chiudendo i contatti C1, C2 e C3 al fine di limitare la corrente del rotore tra i valori massimi e minimi specificati (Fig. 6.12 (b)).

Poiché la maggior parte della perdita di rame del rotore si verifica in resistenze esterne, l’aumento della temperatura del rotore durante l’avvio -up è significativamente inferiore rispetto ai metodi di partenza sopra descritti.
La caratteristica importante di questo metodo di avvio del motore a induzione è che la coppia di avvio e il rapporto di coppia / corrente sono elevati.
È quindi adatto per applicazioni che richiedono una rapida accelerazione, partenze e fermate frequenti, a partire da un carico intenso e a partire da un carico di inerzia elevato.
Mentre la coppia massima è indipendente dal valore di resistenza del rotore (Eq. (6.13)), la velocità con cui viene prodotta la coppia massima può essere controllata modificando il valore dei resistori esterni (Eq. (6.12)). I resistori esterni possono quindi essere vari per accelerare la macchina con una coppia massima.