Metodi di controllo della velocità del motore a induzione:
L’unico modo per controllare la velocità di un motore sincrono è controllare la frequenza e la tensione di ingresso, come per mantenere la costante V / F. Il controllo della velocità del motore di induzione, d’altra parte, può essere controllato dai seguenti mezzi:
- Controllo della tensione dello statore
- Controllo della frequenza
- Controllo scorrevole
1. Controllo della tensione dello statore:
Questo vale per i piccoli motori e il carico della ventola, in cui la coppia di carico aumenta con la velocità. Come già accennato in precedenza, esistono due modi per controllare il valore RMS della tensione dello statore – controllo di fase e il pieno controllo del ciclo.
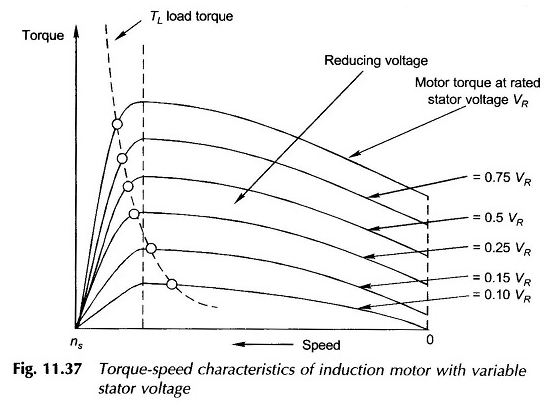
Le caratteristiche di coppia di un motore a induzione con controllo della tensione dello statore sono disegnate nella Figura 11.37. La coppia massima è ridotta come il quadrato della tensione.
La figura illustra inoltre che la regolazione della velocità è possibile solo per un carico la cui coppia diminuisce con la velocità. Anche allora, la regolamentazione della velocità non è ottenuta per basse velocità, la velocità scende bruscamente.
2. Controllo della frequenza:
Qui, la frequenza di input è varia per mezzo di un inverter; Per la frequenza sub-normali, la tensione dello statore è anche variata per mantenere la costante V / F, che mantiene il flusso / post con conseguente aumento dell’aria.
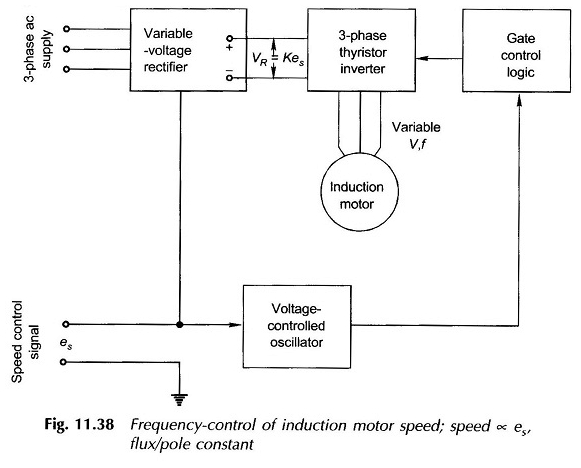
Un sistema di controllo tipico che utilizza il controllo della frequenza è schematicamente illustrato nella Figura 11.38. A causa delle principali spese in conto capitale, questo sistema è giustificato solo per i dischi in cui sono essenziali le caratteristiche senza manutenzione e senza manutenzione del motore a induzione.
Altrimenti, un motore CC con controllo del convertitore è l’alternativa logica ed economica. Il cuore dello schema di controllo della frequenza è l’inverter a tiristore a tre fasi.

Le caratteristiche della velocità di coppia del controllo della frequenza variabile, costante-v / f sono state illustrate nella Figura 11.39. Possiamo vedere che la coppia massima non si modifica perché il flusso / post è mantenuto a un valore fisso.
3. Controllo di scorrimento:
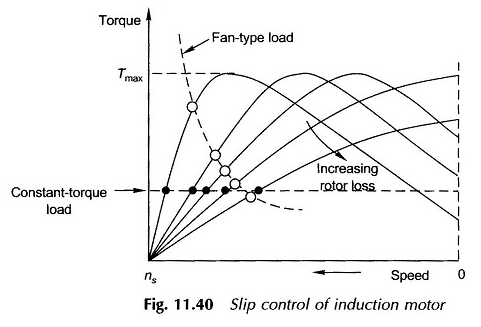
È già noto che il controllo sub-sincrono della velocità del motore di induzione è possibile introducendo una resistenza variabile nel circuito del rotore di un motore a induzione del rotore della ferita. Questo metodo fornisce una vasta gamma di velocità e una buona coppia di partenza come illustrato nella Figura 11.40.
La coppia massima in questo caso rimane costante. Una buona regolamentazione della velocità è realizzabile per carichi costanti di coppia e tipo di ventola.
La più grande stampa di controllo della velocità del motore a induzione è la sua scarsa efficienza dovuta alla potenza sprecata nella resistenza esterna del rotore.
Il metodo di controllo scorrevole si basa sul principio generale secondo cui lo scorrimento del motore di induzione aumenta man mano che si verifica una perdita di energia elettrica sul circuito del rotore.
La perdita del circuito del rotore variabile può essere ottenuta mediante lo schema di introduzione di un convertitore controllato nel circuito del rotore che fornisce una resistenza fissa come mostrato nella Figura 11.41.
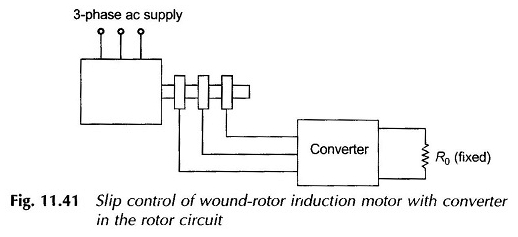
Piuttosto che sprecare l’energia di slittamento in una resistenza esterna, può essere recuperato e riferito alla fornitura, rimuovendo così lo svantaggio di una bassa efficienza del metodo di controllo scorrevole.