Motore di induzione del rotore della ferita con cascata del convertitore sub-seincrono nel circuito del rotore:
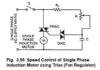
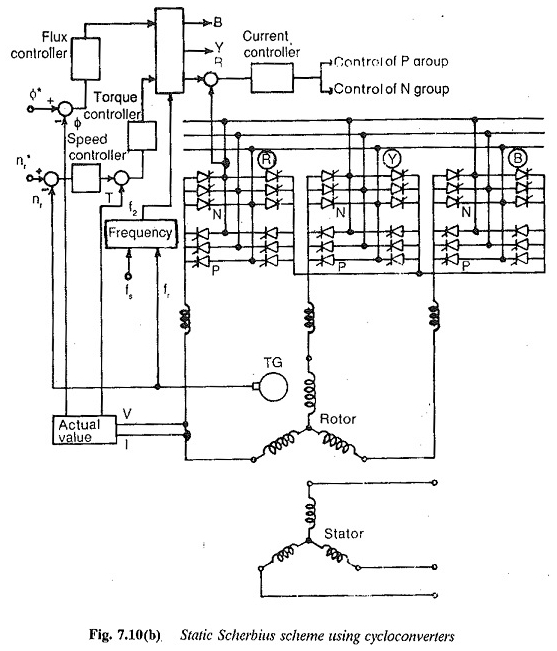
I seguenti punti promuovono l’applicazione di un motore a anello scorrevole con un diagramma di recupero di energia scorrevole statica nel circuito a cascata del convertitore sub-sincrono, per guidare una pompa centrifuga (Fig. 7.10).

1. Il controllo della velocità di consegna della pompa è completato dal controllo della velocità della pompa. Il controllo della velocità del motore viene eseguito recuperando l’energia di slittamento nel settore.
Il sistema non ha perdite di scorrimento, vale a dire che le perdite si verificano a causa della velocità di calo della velocità, quindi il requisito di alimentazione del lettore è quello di guidare il carico, più il motore a induzione della radice della ferita con convertitore e perdite del motore under-seincrone. Sulla base del consumo di energia, il sistema è preferito perché è molto efficace.
2. È possibile un controllo senza un passo molto fluido, per evitare sovratensioni del sistema idraulico a causa dell’attivazione della pompa ON e disattivata
3. capacità di progettazione del convertitore statico; Il vantaggio del motore a induzione del rotore della ferita con una cascata di convertitore sub-sincrono nel rotore di un motore a induzione sul convertitore nutrito dello statore è che la cascata del convertitore statico non deve essere notata per una nota completa del motore.
La notazione del convertitore dipende dall’intervallo di controllo della velocità richiesto al di sotto della velocità sincrona.
Poiché l’intervallo di velocità è limitato al 30-50%, la cascata del convertitore deve essere valutata anche per il 30-50% del pieno, ma il convertitore deve essere progettato per progettare che è in grado di guidare la più alta corrente possibile ad alta velocità e con la massima tensione possibile alla massima velocità.
Per fare ciò, l’attuale valutazione del design del motore a induzione del rotore della ferita con il convertitore sotto-screen è leggermente più alto della potenza scorrevole.
Poiché la corrente più alta e la più alta tensione non si verificano contemporaneamente, la progettazione del motore di induzione del motore della ferita con un convertitore sub-sincrono può essere ridotta da interruttori.
4.Ints: è possibile avviarsi agevole del motore. La coppia può essere regolata utilizzando la corrente di connessione a cascata. I picchi di corrente di partenza non ci sono.
5. Parenza e flessibilità: il sistema ha una maggiore sicurezza operativa e offre una disponibilità flessibile dell’installazione.
In caso di guasto del convertitore in Cascade e in qualsiasi altra condizione di emergenza, è possibile eseguire il motore con un controllo della velocità mediante la variazione della resistenza del rotore utilizzata per l’avvio. Tuttavia, la resistenza al rotore deve essere stata progettata per servire le due opere.
Questa possibilità non è lì con altri sistemi. C’è un’altra flessibilità operativa nell’uso di un motore a induzione del rotore della ferita con un convertitore sub-sincrono. È possibile utilizzare una data unità con diversi motori a induzione e quindi meno cascate di convertitore che possono essere utilizzate le pompe.
Ciò è possibile se non tutte le pompe richiedono il controllo della velocità contemporaneamente. Solo questa pompa che richiede un controllo di velocità viene utilizzata con la cascata e la pompa che non richiede il controllo della velocità viene utilizzata con un normale motore di induzione.
La pompa da regolare può essere scelta a piacimento e, pertanto, l’installazione ha un controllo molto flessibile.
6. Il sistema può essere sviluppato per tutti gli intervalli di alimentazione e le velocità della pompa centrifuga. La velocità più alta disponibile è di 1800 giri / min e in casi eccezionali, questo può essere esteso a 3600 giri / min.
La cascata del convertitore sub-screen è maggiore dei motori a corrente continua alimentata dal convertitore rispetto a questo criterio. Tuttavia, è inferiore ai convertitori alimentati con motori sincroni che sono disponibili per velocità fino a 6000 giri / min.

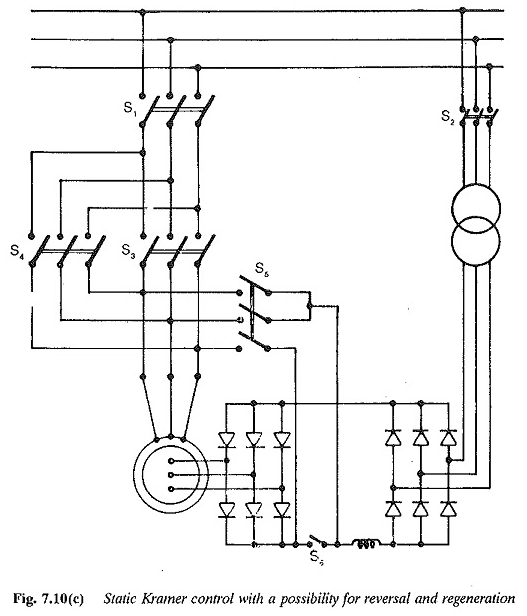
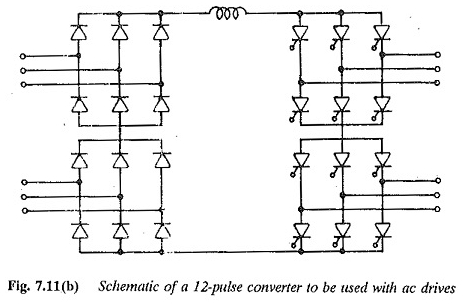
7. Per migliorare le prestazioni, vengono apportate le seguenti modifiche allo sviluppo del convertitore. Un convertitore a 12 impulsi (Fig. 7.11) può essere utilizzato per ridurre l’ampiezza delle coppie pulsanti e le perdite armoniche nel motore.
L’inverter a 12 titoli ha solo armoniche di ordine superiore e la distorsione della tensione di linea sarà piccola. Le coppie pulsanti sono influenzate dal numero di impulsi del raddrizzatore.
La disposizione dei 12 impulsi di inverter riduce la pulsazione della coppia riducendo la corrente dello statore e la distorsione della tensione. 12 Inverter a impulsi sono necessari se la valutazione del cortocircuito del settore è inferiore a quella del motore.
È anche necessario se la linea è tale che le armoniche dell’inverter siano in grado di causare distorsioni
8. Lo svantaggio principale delle cascate del convertitore è uno scarso fattore di potenza a causa del controllo di fase della linea online. Sono stati sviluppati metodi per migliorare il fattore di potenza. Uno di questi metodi è il controllo sequenziale dell’inverter sul lato della linea. L’operazione sequenziale migliora il fattore di potenza richiedendo una potenza reattiva ridotta.
Convertitore alimentato a motore sincrono per pompe centrifughe
Il motore sincrono nutrito al convertitore soddisfa tutti i criteri discussi in precedenza e ha un’applicazione per guidare le pompe centrifughe. Rispetto al rotore dell’anello scorrevole con cascata del convertitore, ha vantaggi di:
- velocità operativa più elevata fino a 6000 giri / min
- Il semplice convertitore a causa della commutazione della macchina (con assistenza di commutazione solo a bassa velocità)
- Il fattore di potenza della linea è migliore del convertitore a cascata
- Le caratteristiche dell’avvio fluido e la possibilità di raggiungere l’allenamento senza attrezzatura contemporaneamente a velocità molto basse e alte.