Cambio di palo del motore a induzione:
Modifica del palo del motore a induzione – Per una determinata frequenza, la velocità sincrona è inversamente proporzionale al numero di poli. Velocità sincrona e quindi la velocità del motore può essere modificata modificando il numero di poli.
Le disposizioni per la modifica del numero di poli devono essere incorporate nella fase di produzione e queste macchine sono chiamate “motori di cambiamento polare” o “diversi motori a velocità”.
Il rotore della gabbia scoiattolo non è arrotolato per un numero specifico di poli. Produce lo stesso numero di poli dell’avvolgimento dello statore. Pertanto, in un motore a gabbia scoiattolo, è necessaria solo una disposizione per modificare il numero di poli nello statore.
Nel motore delle ferite, è inoltre richiesto il layout per la modifica del numero di poli nel rotore, che complica la macchina. Pertanto, questo cambiamento di polo del metodo di controllo del motore di induzione viene utilizzato solo con motori a gabbia scoiattolo.
Una disposizione semplice ma costosa per modificare il numero di post dello statore consiste nell’utilizzare due avvolgimenti di statore separati che vengono arrotolati per due numeri di poli diversi. Un’alternativa economica e comune è quella di utilizzare un singolo statore di avvolgimento diviso in alcune bobine.
Il numero di poli viene modificato modificando le connessioni di questi gruppi di bobine. Teoricamente dividendo l’avvolgimento in un numero di gruppi di bobine e lasciando i terminali di tutti questi gruppi, è possibile ottenere un certo numero di poli riconnettendo questi gruppi.
In pratica, per semplicità, l’avvolgimento è diviso solo in due gruppi di bobine. Ciò consente il cambiamento del numero di polo di un fattore 2. Una disposizione di avvolgimento per questo particolare caso viene spiegata come segue:
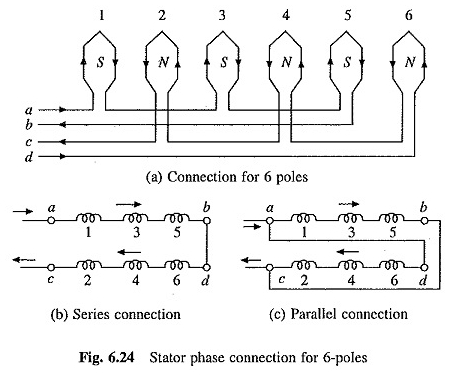
La Figura 6.24 (a) mostra un avvolgimento di fase composto da 6 bobine divise in due gruppi AB composti da bobine insolite numerate (1, 3, 5) collegate in standard e CD di bobine uniformi (2, 4, 6) collegate in serie.
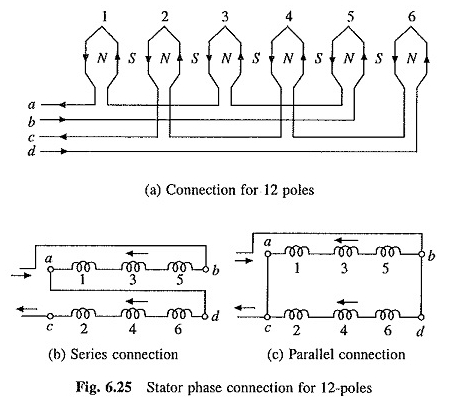
Le bobine possono essere progettate per trasportare la corrente nei dati indicati collegando i coel di bobine in serie o in parallelo, illustrate con la Fig. 6.24 (b) e (c), rispettivamente. Con questa connessione, la macchina a 6 poli. Se la corrente attraverso le bobine del gruppo AB viene invertita (Fig. 6.25 (a)), tutte le bobine produrranno poli settentrionali. F
I lussi che escono da questi poli del Nord ora troveranno la strada attraverso gli spazi inter-piattaforma per uscire, producendo quindi i poli meridionali in inter-play. Pertanto, la macchina avrà ora 12 tracce.
Anche in questo caso, la direzione richiesta della corrente attraverso le bobine può essere ottenuta collegando le due sezioni AB e CD in serie o in parallelo come indicato nella Figura 6.25 (b) e (c).
Pertanto, ogni fase dell’avvolgimento della macchina ha due gruppi di bobine, AB e CD, che possono essere collegati in serie o in parallelo per i due poli e 12.
Inoltre, tre fasi della macchina possono essere collegate per formare una connessione delta o stella.
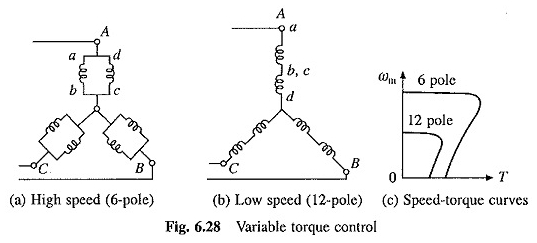
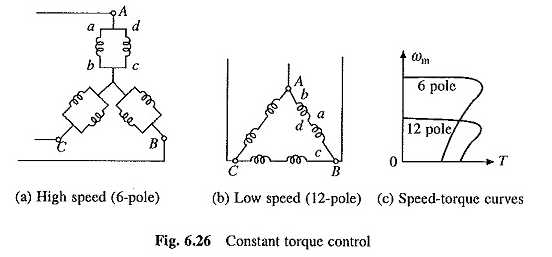
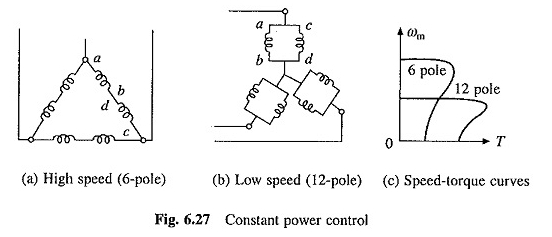
Scegliendo una combinazione appropriata di connessioni seriali o parallele tra i gruppi di bobine di ciascuna fase e la connessione stella o delta tra le fasi, è possibile ottenere la variazione di velocità con un’operazione di coppia costante, un’operazione di alimentazione costante o un’operazione di coppia variabile. Le connessioni e le curve della velocità chiave per queste operazioni sono rappresentate nelle Figg. 6.26 a 6.28.