Modulazione di ampiezza modulazione dei poli: motore a induzione:
Il metodo di modifica del post come già discusso consente una modifica della velocità di un fattore 2. In alcune applicazioni, una modifica della velocità è richiesta solo da una piccola quantità, ad esempio alcuni ventilatori e lettori della pompa richiedono una riduzione della velocità per ridurre la potenza della potenza al massimo a metà della nota.
Poiché la coppia è proporzionale al quadrato in un quadrato in un lettore di ventilatori, la potenza è proporzionale alla (velocità) 3. La metà della potenza nominale si ottiene quando la velocità viene ridotta di circa il 20%. Una variazione di velocità così piccola è possibile per motore di induzione dell’ampiezza dei poli.
La distribuzione MMF nelle escursioni aeree a causa dell’avvolgimento dello statore di un motore a induzione a tre fasi può essere generalmente scritto come
dove θ è l’angolo meccanico.
In un normale motore di induzione, le ampiezze di MMFS FMA, FMB e FMC sono costanti ed uguali. Nel metodo in discussione, le ampiezze sono varie (o modulate) a seconda della regola:
Teoricamente, K e α possono avere valori.
Sostituzione dell’equazione. (6,65) in (6,64) rendimenti
che può essere scritto come
![]()

Pertanto, il motore di induzione della modulazione di ampiezza dei poli MMF in una macchina a tre fasi con pali P, produce due set di MMF a tre fasi con post (P -K) e (P + K). Poiché due set di pali produrranno coppie in direzioni opposte, una di esse deve essere eliminata.
Questo può essere fatto scegliendo il valore di α 2π / 3 o –2π / 3. Dell’equazione. (6.67) È ovvio che il numero di poli modificati sarà (p + k) negli antichi e (p – k) in quest’ultimo, perché altri poli producono piastrine di co -co -MMF che non producono alcuna coppia media.
Di solito, il valore di K, noto come ciclo di modulazione, è diventato l’unità. Anche allora, è molto difficile attuare la legge di modulazione delle equazioni. (6.66) per la sua natura sinusoidale. Tuttavia, può essere semplificato come
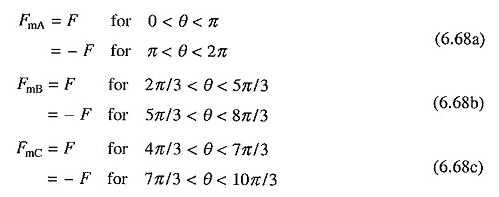
La funzione di modulazione di fase A è rappresentata nella Figura 6.29 (a). La legge sinusoidale della modulazione era quindi approssimata da un’onda di corrente alternativa rettangolare. Ciò significa che per il cambiamento nel numero di poli, la corrente attraverso l’ultima metà delle bobine in ciascuna fase viene invertita.
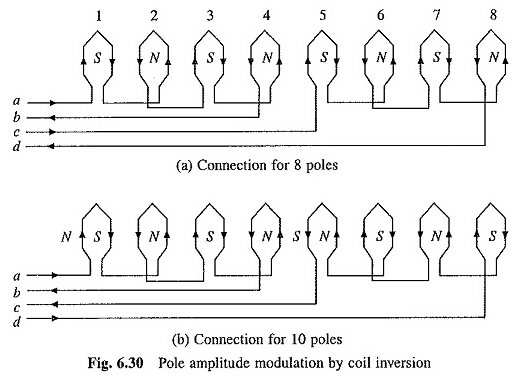
Questa legge è conosciuta come l’inversione della bobina. La Figura 6.30 mostra l’implementazione di questa legge per uno statore a 8 pole. Con la direzione corrente illustrata nella Figura 6.30 (a), la macchina funziona con 8 poli. L’inversione del gruppo di bobine CD modifica il numero di poli a 10, come mostrato nella Figura 6.30 (b).
Anche qui, la direzione richiesta delle correnti attraverso le bobine può essere ottenuta collegando i gruppi di bobine AB e CD in serie o in parallelo.
Con una buona scelta di serie e connessioni parallele da un lato e delta e stella dall’altra parte, è possibile ottenere operazioni di coppia costante, potenza costante e coppia variabile.
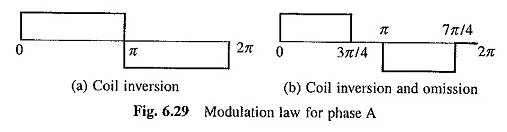
Un’altra semplice legge del motore di induzione della modulazione di ampiezza dei poli, noto come inversione e omissione della bobina, è illustrata nella Figura 6.29 (b) per la fase A. richiederà tuttavia che le connessioni siano pubblicate per tre gruppi di bobine per ogni fase. Disegnando una figura simile a Fig.
6.30, si può dimostrare che il motore di induzione della modulazione di ampiezza dei poli di una macchina a 8 poli fornisce 6 poli.
Come i sistemi post che non si alternano lungo la periferia, questi motori di connessione modificati soffrono di correnti e tensioni armoniche e hanno un fattore di potenza e un’efficienza inferiore a quella dell’evoluzione dei poli descritti nella sezione precedente. Trovano applicazioni in fan, fan e allenamento della pompa.