Motori a induzione a tre fasi:
I motori a induzione a tre fasi sono di due tipi: la scatola dello scoiattolo e il rotore delle ferite.
Nella gabbia da scoiattolo, il rotore è costituito da barre del conducente longitudinale che si corrono in corto circuito da connettori circolari su entrambe le estremità mentre nel motore del rotore della ferita, il rotore ha anche un avvolgimento in tre fasi equilibrato con lo stesso palo dell’avvolgimento dello statore. Tuttavia, in entrambi, lo statore indossa un avvolgimento distribuito a tre fasi.
Analisi e prestazioni:
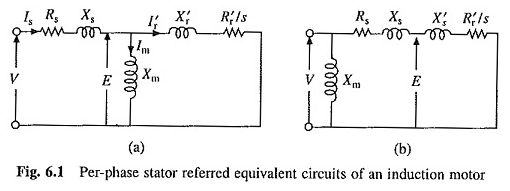
Il circuito equivalente per fase di un motore di induzione a tre fasi è rappresentato nella Figura 6.1 (a). R′R e X′R sono i valori indicati dello statore della resistenza del rotore RR e la reattanza del rotore XR. Lo spostamento è definito da

dove ωm e ωms sono velocità del rotore e sincrone, rispettivamente. Ulteriore

dove f e p sono rispettivamente la frequenza alimentare e il numero di poli.
Poiché la caduta dello statore nell’impedenza è generalmente trascurabile rispetto alla tensione V terminale V, il circuito equivalente può essere semplificato a quello mostrato nella Figura 6.1 (b).
Anche dell’equazione. (6.1)
![]()
Nella Figura 6.1 (b),

Potenza trasferita al rotore (o energia d’aria)
![]()
La perdita di rame da parte del rotore è
![]()
Energia elettrica convertita in energia meccanica

Coppia sviluppata dal motore
![]()
Sostituzione delle equazioni. (6.3) e (6.7)

Sostituendo dall’equazione. (6.4) dà
Un confronto delle equazioni. (6.5) e (6.9) suggeriscono che

La coppia di uscita del motore sull’albero è ottenuta deducendo coppie di deriva di attrito e core-core dalla coppia sviluppata.
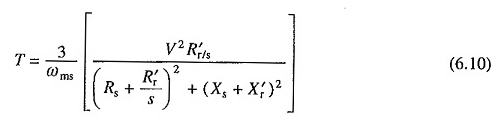
La coppia sviluppata dipende solo dallo scorrimento (Eq. (6.10)). La differenziazione di T in (6.10) rispetto a S e assimilato a zero dà lo spostamento per una coppia massima 
Sostituendo dall’equazione. (6.12) in (6.10) fornisce un’espressione per la coppia massima

La coppia massima è anche nota come coppia di guasto. Sebbene sia indipendente dalla resistenza del rotore, SM è direttamente proporzionale alla resistenza al rotore.
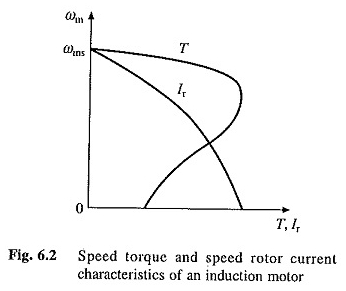
Le nature delle caratteristiche di velocità e velocità sono rappresentate nella Figura 6.2. La corrente del rotore e la coppia sono zero a velocità sincrona. Con una diminuzione della velocità, entrambi aumentano.
Mentre la coppia si è ridotta dopo aver raggiunto il valore di rottura, la corrente del rotore continua ad aumentare, raggiungendo il valore massimo a velocità zero. La caduta nella velocità del carico completo dipende dalla resistenza del rotore.
Quando la resistenza al rotore è bassa, la caduta è piuttosto piccola e, quindi, il motore funziona principalmente a una velocità costante. La coppia di guasto è una misura della capacità di sovraccarico di coppia a breve termine del motore.
Il motore funziona nella direzione del campo rotante. Direzione del campo rotante e, quindi, la velocità del motore può essere invertita invertendo la sequenza di fase. La sequenza di fase può essere invertita scambiando due terminali del motore.
A volte la coppia è espressa in termini di SM e TMAX, che non solo facilita i calcoli, ma consente anche un rapido apprezzamento della natura delle caratteristiche di velocità di velocità. Dividi l’equazione. (6.10) per (6.13) quindi sostituire i rendimenti (6.12)
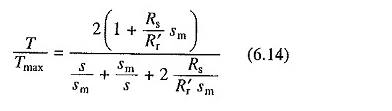
La natura delle caratteristiche di velocità di velocità (Fig. 6.2) può ora essere facilmente spiegata dall’equazione. (6.14).
Per i cambiamenti molto più piccoli di SM, il secondo termine del denominatore domina. Pertanto, la relazione di velocità di velocità da 0 a coppia nominale è approssimativamente rappresentata da una linea retta.
Per le diapositive molto più grandi di SM, il primo termine del denominatore domina e la relazione di speed-plat assume una forma iperbolica in questa regione.
Durante tutto il motore del funzionamento del motore, il termine (RSSM / R′R) è piccolo rispetto a 1 e alla fine dominante nel denominatore. Pertanto, può essere eliminato dall’equazione. (6.14). COSÌ

Motori a induzione con design speciali:
Un motore a induzione per uso generale è progettato per funzionare con una diapositiva a basso carico per avere buone prestazioni di esecuzione. Secondo la nota, il carico completo varia varia dal 2 al 7%.
Tale motore ha una corrente di avvio elevato (5-8 volte) e una coppia di avvio basso (carico completo a piena carico di ricarica dei biglietti). Alcune applicazioni richiedono che il motore sia progettato in modo diverso. Alcuni di loro sono:
Motori a induzione ad alto livello:
Per le applicazioni di ricarica intermittente, che coinvolgono start -up e arresto e / o funzionare frequenti a bassa velocità per periodi prolungati, i motori a induzione sono progettati con elevata resistenza al rotore.
Questi motori hanno una corrente iniziale bassa e una coppia di inizio elevata, ma una bassa efficienza a pieno carico a causa di un’elevata perdita di rame del rotore. Poiché questi motori funzionano a un grande turno (tra il 10 e il 40% a pieno carico), sono chiamati motori a scorrimento elevato.
I motori a scorrimento elevati sono anche adatti all’allenamento dei ventole in cui la velocità è controllata controllando la tensione dello statore e sono tra la gabbia a due e il rotore della ferita. La natura delle caratteristiche di velocità di scatto di questi motori è rappresentata nella Figura 6.3 (c).
Nei motori a induzione dei casi di scoiattolo, vengono effettuate buone prestazioni di partenza (bassa corrente di partenza e alta coppia di partenza) senza influenzare significativamente le prestazioni a pieno carico utilizzando la barra profonda o i motori a rotore a doppia gabbia.
La frequenza del rotore va da 50 Hz a 1-3 Hz mentre la velocità passa dall’arresto a pieno carico: la variazione della frequenza del rotore viene utilizzata in questi motori per variare la resistenza al rotore di alto valore all’arresto a un valore molto piccolo a velocità intera.
Pertanto, sebbene le prestazioni di avvio e a bassa velocità siano migliorate, le prestazioni a pieno carico non vengono eseguite in modo significativo.
Vice motore a induzione a induzione del vice scoiattolo:
Lo statore della macchina è identico a un motore di induzione per uso generale. Il rotore ha barre del driver profonde e strette, come mostrato nella Figura 6.3 (a).
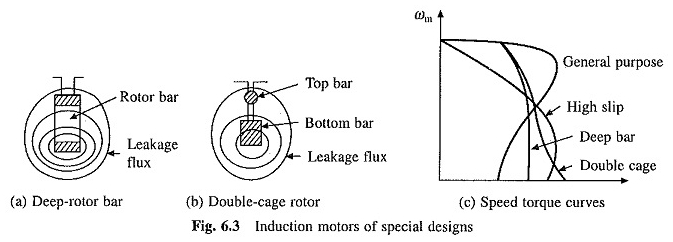
I flussi di perdita di slot prodotti dalla corrente nella barra sono anche illustrati nella figura. Si può immaginare che la barra sia realizzata con un certo numero di strati stretti collegati in parallelo. Confrontiamo il comportamento degli strati superiori e inferiori.
Più collegamenti di flusso di dispersione con lo strato inferiore rispetto allo strato superiore. Di conseguenza, lo strato inferiore ha un’induttanza di perdita molto più elevata rispetto allo strato superiore. Poiché la frequenza del rotore è elevata a bassa velocità, la reattanza e l’impedenza dello strato inferiore sono molto più alte dello strato superiore.
Di conseguenza, a basse velocità, la più alta quantità di corrente viene trasportata dallo strato più alto e più basso nella parte inferiore. A causa della distribuzione ineguale della corrente attraverso la sezione trasversale della barra, una resistenza efficace del rotore è elevata e le prestazioni di avvio -up e a bassa velocità sono migliorate.
A una velocità di carico quasi a piena carico, la frequenza della corrente del rotore e la reattanza delle perdite sono basse. Di conseguenza, la corrente viene anche distribuita attraverso la sezione trasversale della barra e la resistenza effettiva del rotore ha un valore basso. Pertanto, le prestazioni a pieno carico non sono significativamente influenzate. La natura della curva della velocità del motore è rappresentata nella Figura 6.3 (c).
Motore a induzione del rotore a doppio scoiattolo:
Il rotore è costituito da due strati di barre del conducente in ciascuna cerchia di fessura (Fig. 6.3 (b)) cortocircuita dagli anelli finali. La barra superiore ha una sezione trasversale più piccola rispetto al fondo. Pertanto, ha una maggiore resistenza.
La barra inferiore è collegata a una quantità maggiore di flussi di perdita rispetto alla barra superiore e quindi ha una maggiore induttanza. A bassa velocità, per la quale la frequenza del rotore è alta, la barra inferiore ha un’impedenza più elevata. Pertanto, più corrente attraversa la barra superiore.
Poiché la resistenza della barra superiore è ottenuta da buone prestazioni di avvio. Ad alta velocità, per le quali la frequenza del rotore è bassa, la barra inferiore ha un’impedenza molto più piccola di quella tomaia.
Di conseguenza, la corrente del rotore viene trasportata principalmente dalla barra inferiore e le prestazioni a pieno carico rimangono buone perché hanno una bassa resistenza. La natura delle caratteristiche della velocità degli ingranaggi è rappresentata nella Figura 6.3 (c).
Motore di coppia:
I motori progettati per funzionare per lunghi periodi in una condizione in un arresto o a bassa velocità sono chiamati motori a coppia. Sono progettati per sviluppare la coppia desiderata a bassa velocità a bassa velocità.
Le loro caratteristiche di velocità sono modellate per avere una pendenza negativa in modo che forniscano un funzionamento stabile con la maggior parte dei carichi a bassa velocità. Possono essere un tipo di scoiattolo o tipo di ferita. Sono disponibili motori a induzione piphanted e motori a fase monofase.