Principio del motore a induzione | Caratteristica scorrevole di coppia:
Finora il principio del motore di induzione non è stato introdotto. Prendi in considerazione una macchina del rotore cilindrico con lo statore e la ferita del rotore per tre fasi e il numero identico di poli, come mostrato nella Figura 5.40.
Supponiamo inizialmente che il rotore del rotore sia in circuito aperto e lascia che lo statore sia collegato a un bus infinito (V, F).
Le correnti dello statore hanno installato un campo magnetico rotante nello spazio aria che funziona a una velocità sincrona inducendo un EMF nell’avvolgimento dello statore che bilancia la tensione del terminale assumendo che la resistenza dello statore e la reattanza delle perdite siano trascurabili.
Il campo rotante induce anche EMF nell’avvolgimento del rotore, ma nessuna corrente del rotore circola perché il rotore è in circuito aperto. La frequenza degli EMF del rotore è ovviamente f. Poiché il rotore MMF F2 = 0, non viene sviluppata coppia e il rotore continua ad essere stazionario.
Il principio del motore a induzione agisce semplicemente come un trasformatore in cui lo statore (primario) e il rotore (secondario) hanno EMF della stessa frequenza che sono indotti in essa dal flusso magnetico rotante piuttosto che da un flusso che varia nel tempo come in un trasformatore ordinario.
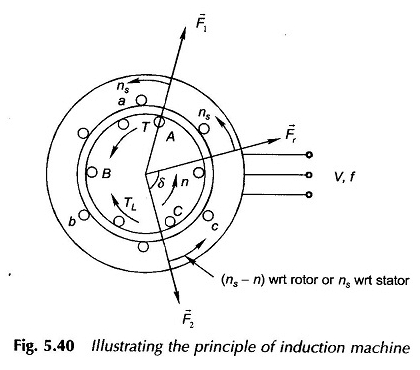 Che il rotore sia ora mantenuto fermo (bloccato dalla rotazione) e l’avvolgimento del rotore è corto. Il rotore ora trasporta correnti attuali che creano la svolta MMF F2 nella stessa direzione e con la stessa velocità del campo dello statore. F2 circola le correnti di reazione nello statore dalla barra del bus (proprio come in un normale trasformatore) in modo che il flusso / polo φr del flusso risultante della densità di flusso (la svolta dell’escursione d’aria a velocità sincrona) induchi uno statore EMF per bilanciare la tensione del terminale. Ovviamente, φR deve essere lo stesso di quando il rotore era in circuito aperto. In effetti, φR rimarrà costante indipendentemente dalle condizioni operative create dal carico sul motore. L’interazione di φR e F2, che sono stazionarie l’una dell’altra, crea la coppia che tende a spostare il rotore nella direzione di FR o il campo dello statore F1. Il motore a induzione è quindi un dispositivo auto-avviamento diverso dal motore sincrono.
Che il rotore sia ora mantenuto fermo (bloccato dalla rotazione) e l’avvolgimento del rotore è corto. Il rotore ora trasporta correnti attuali che creano la svolta MMF F2 nella stessa direzione e con la stessa velocità del campo dello statore. F2 circola le correnti di reazione nello statore dalla barra del bus (proprio come in un normale trasformatore) in modo che il flusso / polo φr del flusso risultante della densità di flusso (la svolta dell’escursione d’aria a velocità sincrona) induchi uno statore EMF per bilanciare la tensione del terminale. Ovviamente, φR deve essere lo stesso di quando il rotore era in circuito aperto. In effetti, φR rimarrà costante indipendentemente dalle condizioni operative create dal carico sul motore. L’interazione di φR e F2, che sono stazionarie l’una dell’altra, crea la coppia che tende a spostare il rotore nella direzione di FR o il campo dello statore F1. Il motore a induzione è quindi un dispositivo auto-avviamento diverso dal motore sincrono.
Lascia che il cortocircuito del rotore sia ora autorizzato a girare. Funziona verso il campo dello statore e acquisisce una velocità costante di n. Ovviamente, n 
Velocità dell’unità di diapositiva (rispetto alla velocità sincrona) a cui il rotore scivola dietro il campo dello statore. La frequenza del rotore F2 = SF è chiamata frequenza scorrevole. Dell’equazione. (5.66), la velocità del rotore è
![]()
Le correnti di frequenza di tiraggio nell’avvolgimento del rotore causano un campo di rotore del rotore in relazione al rotore nella stessa direzione del campo dello statore a una velocità di

Poiché il rotore funziona a una velocità n e il campo del rotore in (ns – n) rispetto al rotore nella stessa direzione, la velocità netta del campo del rotore visto dallo statore (riferimento a terra) è
![]()
Vale a dire, lo stesso del campo dello statore. Pertanto, il campo di reazione F2 del rotore è sempre stazionario rispetto al campo dello statore F1 o al campo FR risultante (con flusso φr per polo). Since the Rotor MMF F2 is proportional to the current of the Rotor I2 and that the flow / pole resulting φr is fixed by the terminal voltage independent of the operating conditions, the torque of the induction engine is given by (see Eq. (5.58)))))))))
![]()
Osserviamo qui che la coppia è prodotta dal motore a induzione a qualsiasi velocità meccanica diversa da sincrona; Una coppia del genere si chiama coppia asincrona.
L’angolo δ con cui F2 è in ritardo su FR, il MMF risultante deve essere noto. Prima di procedere a determinare Δ, va notato che il cortocircuito dell’avvolgimento del rotore è equivalente a cortocircuitare tutti i driver di un avvolgimento individuale.
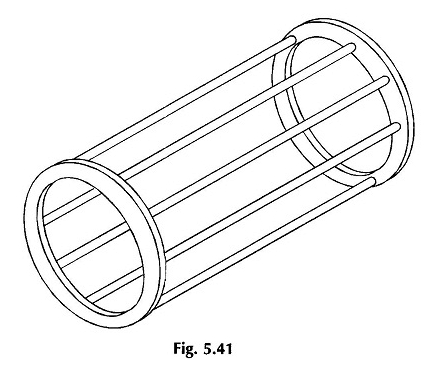
Di conseguenza, il rotore non dovrebbe necessariamente essere correttamente arrotolato; Può essere costruito per eseguire barre posizionate in slot rotor e cortocircuiti creando anelli terminali su ciascun lato del rotore.
Tale rotore è chiamato rotore della gabbia scoiattolo; La gabbia conduttiva è illustrata separatamente nella Figura 5.41. Il rotore di scoiattolo ha una costruzione economica e robusta ed è adottato a maggioranza delle applicazioni del motore a induzione.
Il principio del motore di induzione con un rotore arrotolato correttamente è chiamato motore a induzione del rotore della ferita e viene fornito con tre anelli scorrevoli che forniscono l’installazione per aggiungere una resistenza esterna all’avvolgimento del rotore prima di eliminarli. Questi motori sono utilizzati nelle situazioni di caricamento in carica.
Normalmente, lo scorrimento a pieno carico di un motore a induzione dello scoiattolo è piccolo dal 3 al 10%. Di conseguenza, l’impedenza del rotore è principalmente resistiva, la reattanza degli adattamenti del rotore è proporzionale a F2 = SF è trascurabile. Inoltre, l’EMF induce dal rotore è proporzionale allo scorrimento del rotore perché φR è fisso e gira a velocità ns – n = SNS rispetto al rotore.
Di conseguenza, la corrente del rotore è quasi in linea con l’EMF del rotore e proporzionale allo scivolo del rotore. Questa conclusione si applicherebbe ovviamente anche ai singoli driver del rotore.
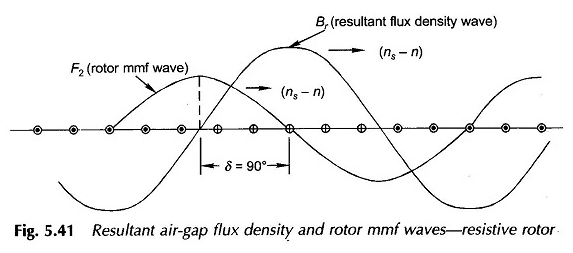
La Figura 5.42 mostra l’onda di densità di flusso di spazzolatura resistente ai residenti davanti ai driver del rotore a velocità (NS – N) = SNS in un diagramma sviluppato.
Le correnti indotte nei driver del rotore corto sono distribuite mosse di distribuzione sinusoidalmente a velocità (NS-N) rispetto al rotore nel sincronismo con il BR. Di più, perché i conducenti del rotore dovrebbero essere riassunti, vale a dire
Le correnti in esse sono in linea con i rispettivi EMF, la distribuzione della corrente del rotore è in fase di spazio con l’onda BR. La distribuzione della corrente del rotore sinusoidale produce un’onda rotore sinusoidale del rotore che è 90 ° dietro la distribuzione della corrente del rotore o 90 ° dietro l’onda lorda.
Si è quindi concluso che per piccoli valori di scorrimento, l’angolo Δ nel motore di induzione è di 90 °. COSÌ,

Poiché il rotore EMF è linearmente proporzionale allo scivolamento, la corrente del rotore è anche principalmente un rotore resistivo a piccoli valori di scorrimento. Di conseguenza, la coppia sviluppata nel motore a induzione è una funzione sempre più lineare dello spostamento per un piccolo valore scorrevole, essendo zero per s = 0, vale a dire a una velocità sincrona.
Man mano che lo spostamento aumenta ulteriormente, la reattanza delle perdite del rotore non può più essere trascurata. Il suo valore di slittamento è SX2, in cui X2 è la reattanza delle perdite del rotore per fase alla frequenza F, vale a dire quando il rotore si trova a un supporto. La corrente del rotore è ora in ritardo dietro l’EMF induce

dove R2 è resistenza al rotore per fase.
Poiché le correnti nei driver del rotore trascinano l’EMF indotta dall’angolo θ, la distribuzione della corrente del driver del rotore e quindi il rotore MMF F2 si sposta a sinistra nella Figura 5.40 da un angolo θ
![]()
Questo significa sin Δ <1. Inoltre, poiché l'impedenza del rotore aumenta con S, la corrente del rotore è lungi dall'essere proporzionale allo spostamento. Questi due fattori causano il passaggio della coppia del motore attraverso un valore massimo, quindi iniziano a diminuire gradualmente man mano che S viene costantemente aumentato.
La natura della completa caratteristica dello spostamento della coppia nel motore a induzione è presentata nella Figura 5.43. La coppia massima è nota come coppia di rottura. Il motore si riposerebbe se fosse caricato oltre un breve periodo di tempo con un carico di coppia maggiore del valore del guasto.
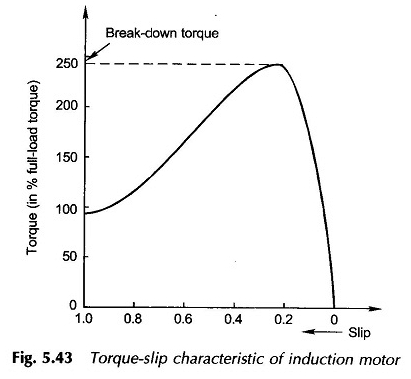
Come già accennato, lo scorrimento di un motore a induzione è dal 3 al 10% a pieno carico. Di conseguenza, è significativamente un’unità a velocità costante a differenza del motore sincrono che funziona a una velocità costante indipendente dal carico.
Generazione dei risultati dell’azione Se un principio del motore di induzione viene eseguito a uno spostamento negativo o ad una velocità, vale a dire a una velocità sopra il sincrono.