Principio operativo del motore a induzione:
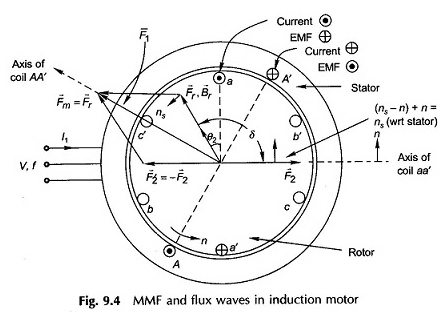
Il principio operativo del motore di induzione nella Figura 9.4 mostra la vista trasversale di un motore a induzione. Lo statore è alimentato da un alimentazione e frequenza di tensione V / fase trifase F HZ. Il rotore è avvolto in 3 fasi per altrettanti poli che lo statore ed è corto circuito. Si presume che la resistenza dello statore e la reattanza delle perdite siano entrambi trascurabili per
![]()
O
- E1 = EMF indotto dallo statore / fase
- KW1 = fattore di avvolgimento dello statore
- NPH1 (serie) = Serie di torne / fase dello statore
- Φr = flusso risultante / polo aereo
È visto dall’equazione. (9.1) che indipendentemente dalle condizioni di carico esistenti sul rotore, φr, il flusso / polo stabilito nell’escursione dell’aria è costante, collegato alla tensione applicata per l’ipotesi fatta.
Il vettore MMF F̅R con il vettore di densità di flusso associato B̅R che è responsabile della produzione di φR funziona a una velocità sincrona perché è associato a 3 correnti bilanciate 3 -fase disegnate dallo statore.
La velocità relativa tra B̅R e il rotore provoca l’induzione di un modello di corrente nel rotore a corto circuito.
La coppia prodotta dall’interazione di B̅R e le correnti del rotore da parte della legge di Lenz tenderebbe a spostare il rotore nella direzione di rotazione di B̅R al fine di ridurre la velocità relativa.
Il motore è quindi auto-demario e il rotore acquisisce una velocità costante n
La Figura 9.4 mostra la posizione relativa dei vettori F̅R, B̅R (mmf di gap aria e densità di flusso), f̅2 (mmf del rotore) in cui F̅R conduce f̅2 dall’angolo Δ = 90 ° + θ2 (azione automobilistica), θ2 è l’angolo in cui il rotore rotore EMF.
L’angolo θ2 è tuttavia molto piccolo perché la reattanza del rotore è molto più piccola della resistenza al rotore. Il vettore dello statore MMF viene quindi dato da
![]()
si trova sul diagramma vettoriale. Finché viene disegnato il diagramma, lo statore e la fase A del rotore (rappresentati sotto forma di una singola bobina) sono massimi possibili. Il lettore può controllare la posizione dei vettori da una fase corrente che applichi la regola giusta.
Scorri e frequenza delle correnti del rotore:
In riferimento alla Figura 9.4, si osserva facilmente che B̅R si muove a velocità (ns – n) rispetto ai driver del rotore (nella direzione di B̅R). Questo è noto come velocità scorrevole. Il cambio è definito come

Ovviamente S = 1 per n = 0, vale a dire per il rotore stazionario e S = 0 per n = ns, vale a dire per il rotore che opera a una velocità sincrona.
La frequenza delle correnti indotte nel rotore è
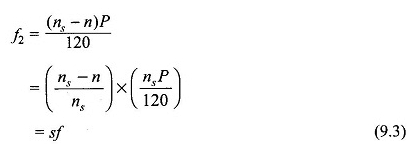
Il grido normale con il carico completo del principio operativo del motore di induzione è di circa il 2% all’8%, in modo che la frequenza delle correnti del rotore sia compresa tra 1 e 4 Hz.
Il rotore per fase EMF a s = 1 (rotore a turni) è dato da
![]()
Ad ogni turno, la frequenza del rotore SF, l’EMF induce dal rotore viene trasformata in SE2. Ora considera l’impedenza del circuito del rotore
![]()
O
- X2 = reattanza del rotore del rotore quando è arrestato (frequenza del rotore = frequenza dello statore, f)
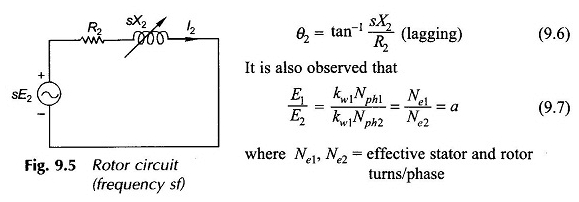
Quando il rotore funziona a Slip s, la sua frequenza è SF, la sua impedenza viene trasformata in
![]()
Si è quindi scoperto che la frequenza delle correnti del rotore, la sua FEM indotta e la sua reattanza variano in proporzione diretta allo spostamento. La Figura 9.5 mostra il circuito del rotore con S scorrevole. L’angolo della fase del circuito è
Produzione di MMF e coppia del rotore:
Nella Figura 9.4 Come vettore della densità di flusso risultante B̅R funziona a velocità (ns – n) rispetto al rotore, un EMF massimo positivo viene indotto nella bobina del rotore AA ‘(indicato da DOT nel driver A e cross nel driver A’) quando B̅R è a 90 ° davanti al declino.
Poiché la corrente nel rotore è in ritardo rispetto all’EMF di θ2, la corrente nella bobina AA ‘sarà massima positiva quando B̅R avrà avanzato ulteriormente dall’angolo θ2. È in questo momento che il vettore MMF del rotore F̅2 sarà lungo l’asse della bobina AA ‘.
Si vede quindi che B̅r (o F̅R) è ad un angolo Δ = (90 + θ2) prima di F̅2. Inoltre, F̅2 causato dalle correnti del rotore di frequenza F2 = SF funziona rispetto al driver del rotore a velocità (ns – n) e alla velocità NS.
Per quanto riguarda lo statore perché il rotore stesso si muove nella stessa direzione a velocità n rispetto allo statore.
Pertanto, F̅R e F̅2 si muovono entrambi a una velocità sincrona NS rispetto allo statore e sono stazionari rispetto agli altri con F̅R situato davanti a F̅2 per angolo (90 ° + θ2).
L’interazione del campo del rotore e il campo risultante crea un paio nella direzione di rotazione di F̅r.
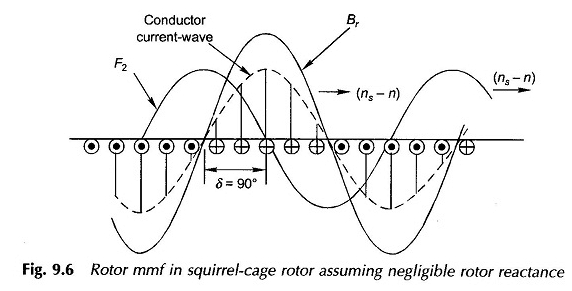
Ora considera il caso del rotore dello scoiattolo con i conducenti che si diffondono uniformemente attorno alla periferia del rotore. La reazione del rotore MMF F2 è meglio visualizzata dal diagramma sviluppato di FIG.
9.6 in cui il rotore è immaginato sia stazionario e l’onda marrone, in movimento rispetto ad esso alla velocità di scorrimento (ns – n). Che la reattanza del rotore sia considerata trascurabile in modo che le correnti del conducente (cortocircuite) siano in linea con il driver EMF.
L’attuale modello del conducente è quindi dissipato sinusoidalmente ed è nella fase spaziale con breve e si muove in modo sincrono con esso. L’onda MMF del rotore è un sinusoidale immagazzinato con lo stesso numero di poli del movimento dell’onda grezza con essa.
Il suo fondamentale (F2) rappresentato nella Figura 9.6 le leggi del BR sostengono di 90 °. Se la reattanza del rotore viene ora messa in scena, l’onda di corrente del conducente e, quindi, l’onda MMF del rotore sarebbe in ritardo di angolo θ2.
Pertanto, l’angolo tra il BR e l’onda F2 sarebbe (90 ° + θ2), lo stesso del rotore della ferita.
Un rotore a gabbia scoiattolo reagisce quindi allo stesso modo di un rotore della ferita, tranne per il fatto che il numero di fasi non è ovvio – può essere considerato tante fasi delle barre / poli. Un rotore a gabbia da scoiattolo può sempre essere sostituito da un rotore della ferita equivalente con tre fasi.
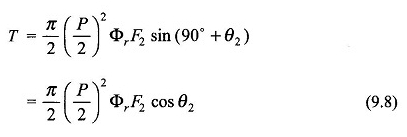
È visto dall’equazione. (9,8) rispetto a un rotore di reazione a bassa reazione (debole θ2 = tan-1 jsx2 / r2) genererà una coppia più grande per φr, f2 e s indicato.
Un motore scoiattolo a gabbia è più alto in questo senso rispetto a un motore del rotore della ferita perché il rotore della gabbia ha una reattanza inferiore perché non ha una sporgenza di avvolgimento.
Un’osservazione molto importante che può essere fatta in principio di gestione del motore di induzione qui è che, sebbene le correnti del rotore abbiano una frequenza SF, la MMF (F2) causata da esse funziona a velocità sincrona rispetto allo statore.
In altre parole, la reazione delle correnti del rotore corrisponde alle correnti di frequenza (F) dello statore che scorre su una struttura cilindrica stazionaria equivalente posizionata all’interno dello statore anziché sul rotore.
Oppure, per mettere in un altro modo, le viste correnti del rotore dello statore hanno la frequenza F ma hanno lo stesso valore RMS.
Il vettore F̅1 dello statore MMF si trova nella Figura 9.4 dell’equazione del vettore
![]()
Inoltre, F̅1 può essere diviso in componenti come
![]()
dove f̅2 è in opposizione a F̅2 e uguale alla grandezza e
![]()
La corrente dello statore che causa F̅1 può, corrispondente al vettore EQ. (9.10), essere diviso in componenti
![]()
Qui, I̅M può essere riconosciuto come una corrente di magnetizzazione del file che provoca il MMF FR risultante e il flusso / polo risultante, φr, mentre il componente della corrente dello statore che bilancia la reazione F2 della corrente del rotore I2.
La Figura 9.4 mostra anche la posizione relativa dello statore AA ‘e la direzione positiva della corrente. Questa immagine vettoriale istantanea vale quando I2 ha un valore positivo massimo.
Per F’2 per annullare F2, il componente di corrente dello statore che bilancia il rotore MMF deve essere in linea con la corrente del rotore come mostrato nello statore.

In termini di ampiezze, F’2 è diretto di fronte a F2, in modo che si annullano mentre I’2 e I2 devono obbedire alla proporzionalità dell’equazione. (9.13) e deve essere in fase.
Inoltre, facendo riferimento alla Figura 9.4, possiamo facilmente vedere che nello statore la direzione positiva dell’EMF E1 è contraria alla direzione positiva di I1, mentre nel rotore, la direzione positiva di I2 è nella direzione positiva di SE2. Questo è simile al caso del trasformatore.
Con la direzione di una corrente positiva nello statore AA ‘bobina contrassegnata come nella Figura 9.4 e la direzione dell’asse del colloquio indicato, la legge di induzione che darà un EMF positivo in opposizione alla corrente è

Questo principio operativo del motore a induzione ha lo stesso segno di quello utilizzato nell’alloggiamento del trasformatore in modo che la fase di flusso φR e la corrente di magnetizzazione che la crea in ritardo E1 di 90 °. Nel modello di circuito, l’IM verrebbe quindi disegnato dalla reattanza magnetizzante XM attraverso E1.