Progetto di schema di recupero di potenza utilizzato nel motore a induzione:
Diagramma di recupero di potenza scorrevole utilizzato nel motore a induzione – La Figura 6.53 mostra un circuito equivalente di un motore di induzione del rotore della ferita con una tensione VR iniettata nel suo rotore, supponendo che il rapporto rotore dello statore di turni. Quando la perdita di rame del rotore viene trascurata
![]()
dove PR è la potenza assorbita dalla sorgente VR. L’ampiezza e il segno di PR possono essere controllati controllando la grandezza e la fase VR. Quando PR è zero, il motore opera sulla sua caratteristica della coppia di velocità naturale.
Un PR positivo ridurrà la PMS e, pertanto, il motore funzionerà a una velocità inferiore per la stessa coppia. Quando PR è uguale a PG, PM e, quindi, la velocità sarà zero. Pertanto, la variazione di PR da 0 a PG consentirà la velocità della velocità sincrona a velocità zero. La polarità della realtà virtuale per questa operazione è rappresentata nella Figura 6.53 da una linea continua.
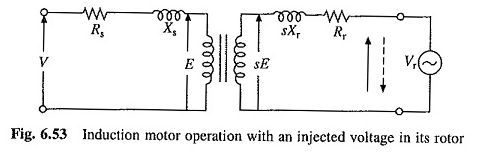
Quando la PR è negativa, IE VR agisce come fonte di alimentazione, PM sarà più grande di PG e il motore funzionerà a una velocità superiore alla velocità sincrona. La polarità della VR per il controllo della velocità sopra la velocità sincrona è rappresentata da una linea tratteggiata nella Figura 6.53.
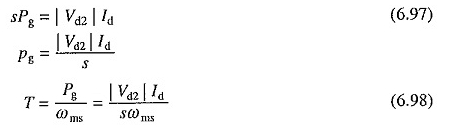
Quando la perdita di rame del rotore viene trascurata, PR è uguale allo schema di recupero di potenza scorrevole utilizzato nel motore a induzione, SPG. Il controllo della velocità sotto la velocità sincrona si ottiene controllando la potenza scorrevole. Lo stesso approccio è stato adottato nel controllo della resistenza al rotore.
Tuttavia, invece di sprecare energia in resistenze esterne, viene utilizzato utilmente qui. Di conseguenza, questi metodi di controllo della velocità sono classificati come uno schema di recupero di potenza scorrevole utilizzato nei modelli di recupero del motore di induzione. Due di questi schemi, l’allenamento statico statico Sherbio e Kramer sono descritti qui.
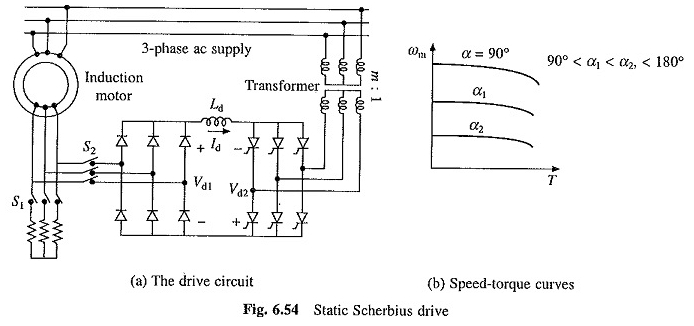
Drive de Scherbius static (Fig. 6.54 (a)):
Fornisce il controllo della velocità di un motore del rotore della ferita sotto velocità sincrona. Parte della potenza CA del rotore viene convertita in CC da un ponte a diodi. Il raddrizzatore controllato che opera come inverter lo converte in AC e lo restituisce alla sorgente CA. Il potere è stato restituito (vale a dire
PR) può essere controllato controllando il contatore Inverter EMF VD2, che a sua volta è controller controllando l’angolo del tenditore. L’induttanza del legame CC è fornita per ridurre la ondulazione nell’attuale collegamento CC.
Poiché lo schema di recupero della potenza scorrevole utilizzata nel motore a induzione viene somministrato alla fonte, a differenza del controllo della resistenza del rotore in cui viene sprecato in resistenza, la guida ha un’elevata efficienza.
Il lettore ha una maggiore efficienza rispetto al controllo della tensione dello statore da parte dei controller di tensione CA per gli stessi motivi.
L’alimentatore di input di guida è la differenza tra energia di input del motore e potenza restituita. La potenza di input reattiva è la somma dei poteri reattivi del motore e dell’inverter. Pertanto, il disco ha un cattivo fattore di potenza in tutta la spiaggia del suo funzionamento.
Nella Figura 6.54 (a), trascurando lo statore e le gocce di rotore

Dove α è l’angolo di scatto dell’inverter e, N e M sono, rispettivamente, il rapporto statore / rotore delle curve del rapporto motore e del lato della sorgente con il convertitore delle curve sul trasformatore. Trascura la caduta attraverso l’induttore
![]()
Sostituzione delle equazioni. (6.93) e (6.94)

dove a = n / m.
Il valore massimo di α è limitato a 165 ° per una commutazione sicura dei tiristori inverter. Lo spostamento può essere controllato da 0 a 0,966a quando α è passato da 90 a 165 °. Per scelta appropriata di A, è possibile ottenere l’intervallo di velocità richiesto.
Il trasformatore viene utilizzato per corrispondere alle tensioni VD1 e VD2. Alla velocità più bassa del lettore, VD1 avrà il valore VD1M massimo dato da
![]()
Dove Smax è il valore dello scorrimento alla massima velocità. Se α è limitato a 165 °, M viene scelto in modo tale che la tensione dell’inverter abbia un valore VD1M quando α è 165 ° IE

Tale scelta di M garantisce il funzionamento dell’inverter al più alto angolo di tiro alla velocità del motore più basso, dando il più alto fattore di potenza (Eqn. (5.109)) e la più bassa potenza reattiva alla velocità più bassa.
Ciò migliora il fattore di potenza nel tubo e riduce la potenza reattiva a tutte le velocità della gamma di velocità del lettore.
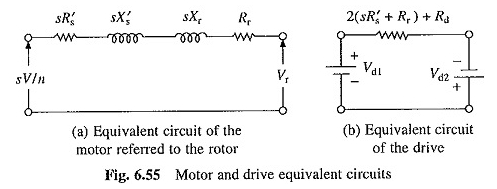
La Figura 6.55 (a) mostra un circuito del motore equivalente riferito al rotore, trascurando il ramo di magnetizzazione. Derivazione dell’equazione. (6.90) mostra che quando indicato al collegamento DC, la resistenza (SR’s + RR) sarà 2 (SR’s + RR). Ciò fornisce un circuito equivalente CC approssimativo del lettore (Fig.
6.55 (b)), dove VD1 e VD2 sono riportati nelle equazioni. (6.93) e (6.94). RD è la resistenza dell’induttanza della connessione CC. Il circuito equivalente ignora la commutazione sul ponte del diodo. ORA

Se la perdita di rame del rotore viene trascurata
La natura delle curve di coppia di velocità è rappresentata nella Figura 6.54 (6).
Il lettore ha applicazioni nei dischi della ventola e nella pompa che richiedono il controllo della velocità solo in una gamma stretta. Se lo scorrimento massimo è indicato da SMAX, allora le valutazioni di potenza del ponte del diodo, l’inverter e il trasformatore possono essere solo Smax Times la potenza del motore (Eq. 6.97).
Ad esempio, quando la velocità deve essere ridotta al di sotto della velocità sincrona solo del 20%, le valutazioni di potenza del ponte del diodo, l’inverter e il trasformatore saranno solo il 20% della potenza del motore. Pertanto, l’unità ha un costo basso.
Il lettore viene avviato controllando la resistenza con S1 chiuso e S2 aperto (Fig. 6.54). Quando la velocità raggiunge l’intervallo di controllo del lettore, S2 è chiuso per collegare il ponte del diodo e l’inverter viene attivato. Ora S1 è aperto per eliminare la resistenza.
Nell’addestramento dei ventole e della pompa, la frenata non è necessaria, perché la pressione del fluido fornisce una coppia di frenata adeguata. Per mantenere un flusso di fluido costante con variazioni nella testa di pressione e la natura del fluido pompato, il lettore viene utilizzato con il controllo della velocità ad anello chiuso.
Uno schema di controllo della velocità del ciclo di chiusura con il controllo della corrente interna è illustrato nella Figura 6.56. Funziona allo stesso modo del diagramma della Figura 3.5.
Questo disco è ampiamente utilizzato nell’addestramento di ventole e pompa medio e elevato (fino a circa 10 MW), a causa dell’efficienza elevata e del basso costo.
Questo disco fornisce un controllo costante di coppia (Eqn. (6.98)). Il controllo di potenza costante è ottenuto dal giocatore statico Kramer descritto di seguito.
Guidare kramer static:
La potenza scorrevole del rotore viene convertita in CC da un ponte a diodo (Fig. 6.57 (a)). La potenza CC viene ora trasformata in un motore CC accoppiato meccanicamente con il motore a induzione. La coppia fornita a spese è una somma di coppia prodotta dall’induzione e dai motori a corrente continua. Il controllo della velocità si ottiene controllando il campo del motore a corrente continua.

La Figura 6.57 (b) mostra le variazioni in VD1 e VD2 con una velocità per due valori di corrente di potenza del motore CC. L’operazione permanente è ottenuta quando VD1 = VD2, IE à A e B per campi di campo IF1 e IF2.
Il controllo della velocità è possibile della velocità sincrona circa la metà della velocità sincrona. Quando è necessaria una gamma di velocità maggiore, il ponte del diodo viene sostituito da un ponte a tiristore.
Ora, la relazione tra VD1 e la velocità può essere modificata controllando la rabbia del raddrizzatore del raddrizzatore del tiristore (vedi Fig. 6.57 (c)). La velocità può ora essere controllata fino all’arresto.